【智能家居】三、添加语音识别模块的串口读取功能点
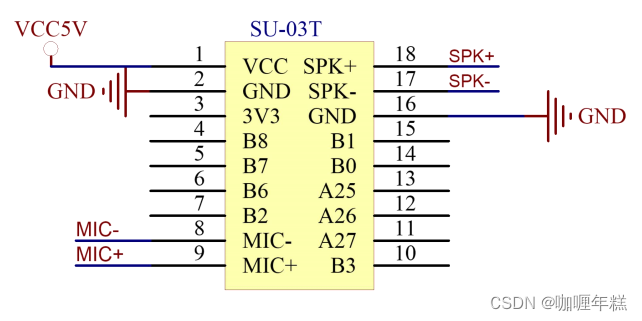
语音识别模块SU-03T
串口通信线程控制代码
- inputCommand.h(输入控制指令)
- voiceControl.c(语音控制模块指令)
- main.c(主函数)
- 编译
- 运行结果
语音识别模块SU-03T
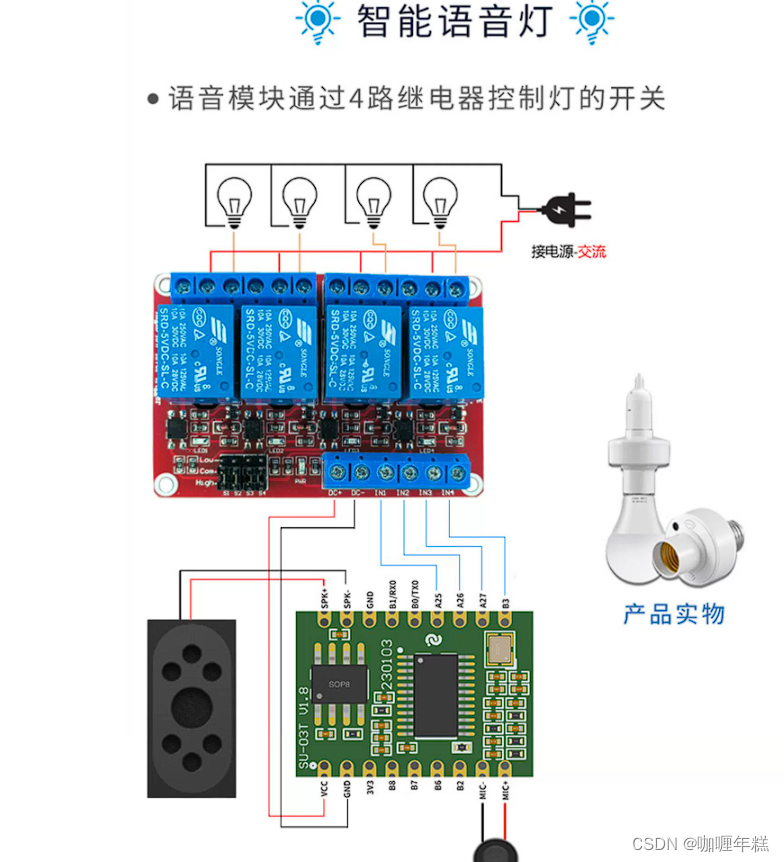
AI智能语音识别模块离线语音控制模块语音识别芯片声控模块SU-03T
离线语音模组 SU-03T开发文档
串口通信线程控制代码
inputCommand.h(输入控制指令)
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <errno.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <wiringPi.h>
#include <wiringSerial.h>
struct InputCommand
{
char commandName[128]; //“控制方式”名
char deviceName[128]; //“设备工厂”名
char command[32]; //存放指令
int fd; //存放文件描述符(串口/网络)
int s_fd; //存放服务器套接字描述符
char port[12]; //存放端口号
char ipAdress[32]; //存放 IP地址
char log[1024]; //日志
int (*Init)(struct InputCommand *voice); //“初始化”函数指针
int (*getCommand)(struct InputCommand *voice); //“获取指令”函数指针
struct InputCommand *next;
};
struct InputCommand* addVoiceControlToInputCommandLink(struct InputCommand *phead); //“语音控制”加入指令链表函数声明
voiceControl.c(语音控制模块指令)
#include "inputCommand.h"
// 语音控制模块初始化函数
int voiceInit(struct InputCommand *voice)
{
int fd;
// 打开串口设备 (voice->deviceName),波特率为 115200
if ((fd = serialOpen (voice->deviceName, 115200)) < 0) {
fprintf (stderr, "Unable to open serial device: %s\n", strerror (errno)) ;
return 1 ;
}
voice->fd = fd; // 将文件描述符存储在 voice->fd 中
return fd;
}
// 从语音控制模块获取指令的函数
int voiceGetCommand(struct InputCommand *voice)
{
int nread = 0;
// 从串口 (voice->fd) 读取数据到 voice->command 中
nread = read(voice->fd, voice->command, sizeof(voice->command));
//返回读取到数据的字节数,实际读取的指令放到了command里
return nread;
}
// 全局变量,表示语音控制的输入命令对象
struct InputCommand voiceControl = {
.commandName = "voice",
.deviceName = "/dev/ttyS5",
.command = '\0',
.Init = voiceInit,
.getCommand = voiceGetCommand,
.log = {'\0'},
.next = NULL
};
// 将语音控制对象加入到输入命令链表中的函数
struct InputCommand* addVoiceControlToInputCommandLink(struct InputCommand *phead) //“语音控制”(对象)加入指令方式链表函数
{
if (phead == NULL) {
return &voiceControl;
}
else {
voiceControl.next = phead;
phead = &voiceControl;
return phead; // 如果链表不为空,将语音控制对象插入到链表头,并返回链表头的指针
}
}
main.c(主函数)
#include <pthread.h>
#include "controlDevice.h"
#include "inputCommand.h"
// 定义指令工厂初始链表头
struct InputCommand *pcommandHead = NULL;
// 查找指令对象 by 名称
struct InputCommand* findCommandByName(char *name, struct InputCommand *phead)
{
struct InputCommand *tmp = phead;
if (phead == NULL) {
return NULL;
}
else {
while (tmp != NULL) {
if (strcmp(tmp->commandName, name) == 0) {
return tmp;
}
tmp = tmp->next;
}
return NULL;
}
}
// 语音控制线程执行函数
void *voiceControlThread(void *data)
{
int nread;
struct InputCommand *voiceHandler = NULL;
// 查找名为 "voice" 的指令处理对象
voiceHandler = findCommandByName("voice", pcommandHead);
if (voiceHandler == NULL) {
printf("find voiceHandler error\n");
pthread_exit(NULL);
}
else {
// 初始化语音控制功能
if (voiceHandler->Init(voiceHandler) < 0) {
printf("voiceControl init error\n");
pthread_exit(NULL);
}
else {
printf("voiceControl init success\n");
}
while (1) {
// 清空指令缓存
memset(voiceHandler->command, '\0', sizeof(voiceHandler->command));
// 从语音控制模块获取指令
nread = voiceHandler->getCommand(voiceHandler);
if (nread == 0) {
// 串口没有获取到指令
printf("No voiceCommand received\n");
}
else {
// 获取到指令
printf("Get VoiceCommand --> %s\n", voiceHandler->command);
}
}
}
}
int main()
{
if (wiringPiSetup() == -1) {
fprintf(stdout, "Unable to start wiringPi: %s\n", strerror(errno));
return 1;
}
pthread_t voiceControl_thread;
// 指令工厂初始化,将语音控制对象加入到指令链表中
pcommandHead = addVoiceControlToInputCommandLink(pcommandHead);
// 创建语音控制线程
pthread_create(&voiceControl_thread, NULL, voiceControlThread, NULL);
// 主函数等待语音控制线程退出
pthread_join(voiceControl_thread, NULL);
return 0;
}