论文分享 | 基于机载单目视觉的四旋翼无人机群内相对定位
阿木实验室推出的开源项目校园赞助活动,再次迎来开发者参与!
国防科技大学电子对抗学院司晓坤同学,在Prometheus开源仿真架构的基础上进行了二次开发,且使用Prometheus 450(P450)进行了真机实验并发表了相关论文。其论文《基于机载单目视觉的四旋翼无人机群内相对定位》收录于中科院SCI期刊工程技术2区,根据活动规则,将获得阿木实验室赞助的奖学金5000元!应作者团队需求,该笔奖学金将作为等值额度,用于抵扣该团队今后在阿木实验室购买科研产品的支出。
现将相关论文内容分享给大家,鼓励更多的开发者加入到我们校园赞助活动中来,只要你是参与开源项目或在相关技术领域获得荣誉成果的用户,参与活动就有机会获得阿木的奖学金!
主题:基于机载单目视觉的四旋翼无人机群内相对定位

DOI:10.3390/drones7100612
Author:Xiaokun Si, Guozhen Xu, Mingxing Ke, Haiyan Zhang, Kaixiang Tong and Feng Qi
Author Affiliation:
1.National University of Defense Technology, Hefei 230031, China
2.Beijing Space Information Relay and Transmission Technology Center, Beijing 102300, China
*: Corresponding author:Feng Qi
期刊:中科院SCI期刊工程技术2区 – Drones
作者:司晓坤,许国珍,柯明星,张海燕,童凯翔,齐锋
作者单位:国防科技大学,北京空间信息传输中心
通讯作者:齐锋
内容概述:
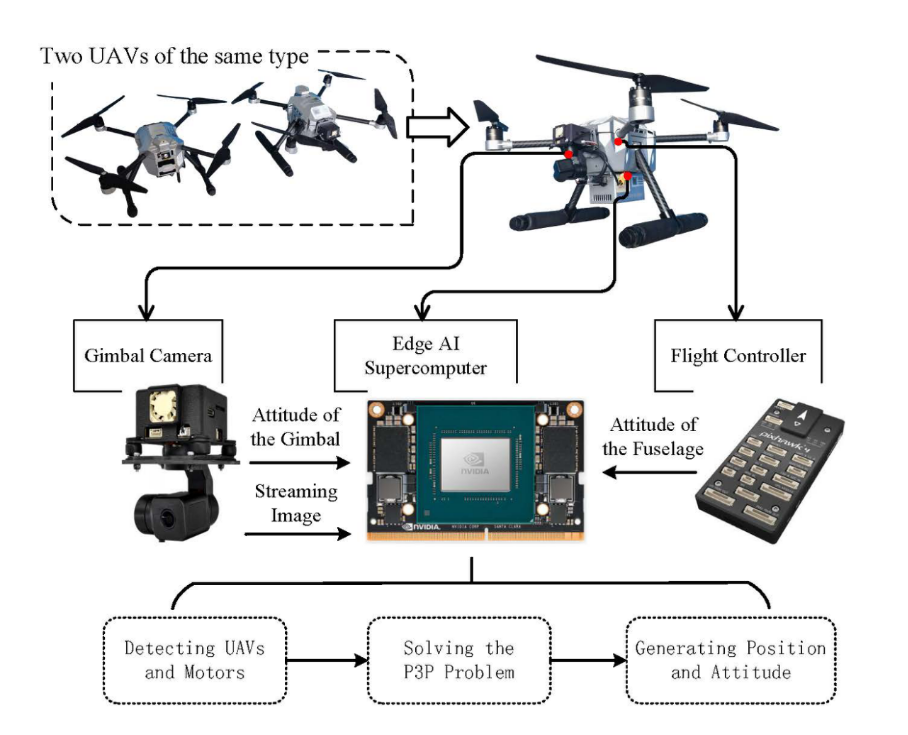
集群化是小型多旋翼无人机发展的重要趋势之一。无人机集群的稳定运行和空地协同作业均需高度依赖集群内部精确的相对位置信息。现有的相对定位解决方案主要依赖于被动接收的外部信息或昂贵复杂的传感器,不能很好适用于小型旋翼无人机群的应用场景。因此,本文开发了一种基于机载单目传感器的相对定位解决方案,以直接实现无人机之间的实时相对定位。首先,本文应用轻量化的YOLOv8目标检测算法来实现四旋翼无人机及其旋翼电机的实时检测。为了提高计算效率,作者根据无人机的几何特性推导出一种适应性更强的P3P问题位姿求解算法。为了解决特征点信息不足时的位姿多解问题,本文提出了一种基于无人机合理姿态范围的多解判定方法。最后,作者先后在边缘计算机和无人机平台上进行了仿真和实物实验。实验结果验证了所提方案的可行性,其中核心算法的性能较经典算法有显著提高。该研究为无人机群摆脱外部信息依赖、应用于复杂环境、改善自主协作和降低成本提供了一种新的解决方案。
引用Prometheus说明:
本文所述研究中,以两架阿木实验室研发的Prometheus 450(P450)无人机为实验平台,并加装阿木实验室研发的G1吊舱作为实时图像采集设备。本文所提出的视觉定位方案均在Prometheus 450(P450)无人机上进行部署和实验,通过实验对所提方案的可行性进行了充分验证。文中引用为“We conduct secondary development and experiments based on two Prometheus 450 (P450) UAVs producted by Amovlab, Chengdu, China [48].”。


如需了解更多论文内容,点击文末左下角“阅读原文”跳转:
https://www.mdpi.com/2504-446X/7/10/612