机器人刚性碰撞任务的阻抗控制性能
问题描述
对于机器人刚性碰撞任务,阻抗控制可以有效地提高机器人的适应性和稳定性。
在刚性碰撞任务中,机器人在接触外部物体时需要快速适应并调整自身的运动轨迹和速度,以实现精确的操控和稳定的交互。阻抗控制可以通过调整机器人的阻抗参数,改变机器人对外部力的响应特性和适应能力,从而更好地应对刚性碰撞任务中的各种挑战。
在装配线中,机器人需要准确地操控和组装各种零部件,包括不同形状、大小和材质的物体。通过采用阻抗控制,机器人可以更好地适应各种外部条件和变化,提高操控的准确性和稳定性,从而提高生产效率和产品质量。

此外,阻抗控制还可以帮助机器人更好地应对外部干扰和冲击。例如,在机器人在执行搬运任务时,可能会遇到不稳定的路面条件或其他外部干扰,导致机器人的运动轨迹和速度发生变化。通过采用阻抗控制,机器人可以更好地适应这些变化,保持稳定的运动状态和任务执行能力。
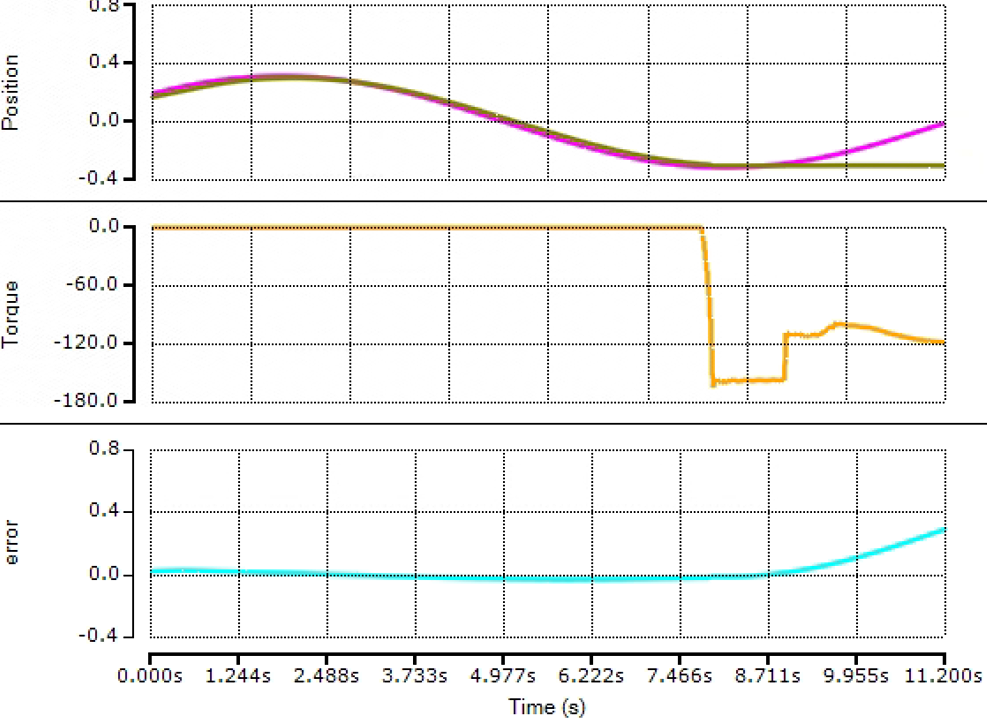
1e4/(0.1*s^2+1*s+1)
![]()

![]()

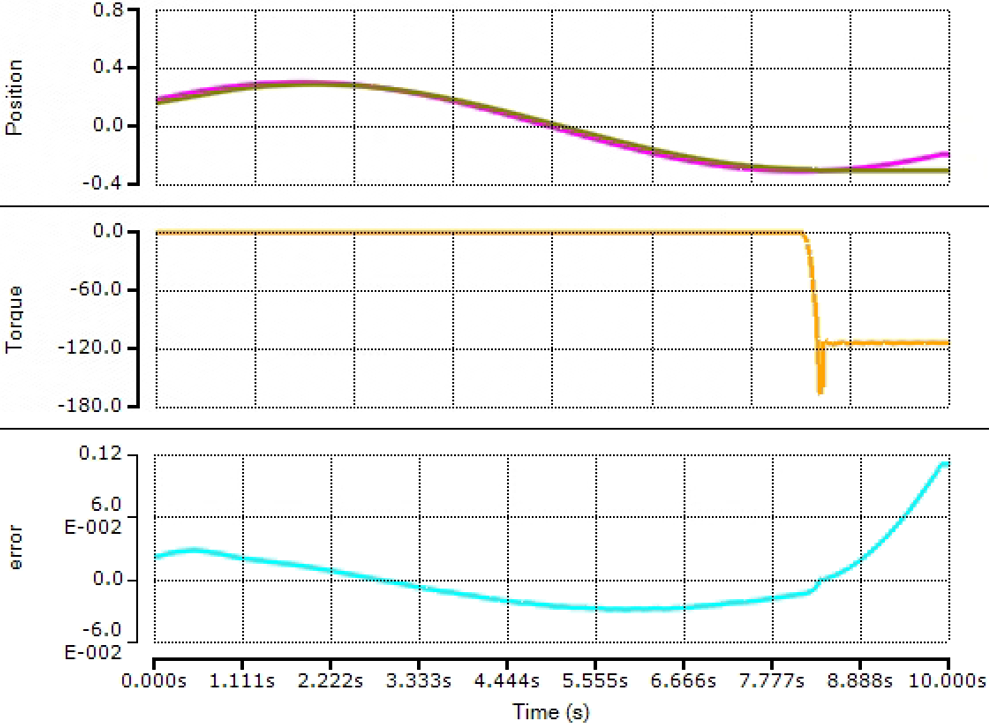
5e4/(0.1*s^2+3*s+1)


![]()