大电流H桥电机驱动电路的设计与解析(包括自举电路的讲解,以IR2104+LR7843为例)
大电流H桥电机驱动电路的设计与解析(包括自举电路的讲解,以IR2104+LR7843为例)
- 电机驱动板主要采用两种驱动芯片,一种是全桥驱动(如:HIP4082),一种是半桥驱动(如:IR2104)
- Chapter1 大电流H桥电机驱动电路的设计与解析(包括自举电路的讲解,以IR2104+LR7843为例)
- 一.简介
- 二.示例原理图和PCB展示
- 1.原理图
- 2.PCB 3D图
- 三.辅助电路部分讲解
- 1.BOOST升压电路
- 2.降压稳压电路
- 3.隔离电路部分
- 四.搭建的H桥驱动电路详解
- 1.简介
- 2.NMOS管IRLR7843
- 3.半桥驱动芯片IR2104S
- 补充总结:
- 4.控制逻辑
- Chapter2 【电机驱动芯片(H桥、直流电机驱动方式)——DRV8833、TB6612、A4950、L298N的详解与比较】
- Chapter3 IR2104电机驱动
- 一、IR2104的引脚定义:
- 二、IR2104的内部原理:
- 三、半桥驱动原理分析
- 四、全桥驱动原理分析
- 五、电感电流回流路径的建立
- 六、自举电容容值的计算与自举二极管选型:
- 七:mos管发热可能的问题
- 八: 推荐阅读
- Chapter4 HIP4082电机驱动电路详解
- 一、原理图
- 二、化简电路再做分析的前提
- 三、分析一下自己的理解
- < 1 > 引脚说明
- < 2 > MOS管的高端驱动和低端驱动
- < 3 > 电机驱动电路分析
- < 4 > 具体到通过PWM控制电机占空比
电机驱动板主要采用两种驱动芯片,一种是全桥驱动(如:HIP4082),一种是半桥驱动(如:IR2104)
Chapter1 大电流H桥电机驱动电路的设计与解析(包括自举电路的讲解,以IR2104+LR7843为例)
原文链接:https://blog.csdn.net/qq_44897194/article/details/107397079
一.简介
之前介绍过H桥电机驱动电路的基本原理,但是以集成的电机驱动芯片为示例。这些集成的芯片使用起来比较简单,但是只能适用于一些小电流电机,对于大电流的电机(比如:RS380和RS540电机),则不能使用这些集成的芯片(否则会导致芯片严重发热并烧毁)。
此时便需要自行用半桥/全桥驱动芯片和MOS管搭建合适的H桥电机驱动电路实现对大电流电机的驱动控制。
二.示例原理图和PCB展示
此原理图和PCB采用的是网上分享的电路设计(IR2104半桥驱动+LR7843MOS管),为了便于焊接,对其中的一些封装进行了修改,并重新布线。
该电机驱动板有两个H桥电路,可以同时控制双路电机。可通过相应的控制信号来控制电机的转速和正反转。
原网址:电赛必备,IR2104S半桥驱动MOS管电机驱动板(可下载工程)
1.原理图

2.PCB 3D图

三.辅助电路部分讲解
本驱动模块默认采用7.4V的锂电池组接入右侧的P1端子进行供电。
1.BOOST升压电路
★BOOST升压电路采用的是MC34063这款芯片。此模块主要是将7.4V的输入电压升到12V后为后面的IR2104S半桥驱动芯片供电(需要12V的原因将在下面介绍)。此芯片的工作原理在此不多做介绍,可自行下载数据手册进行学习(后期会对此专门写一篇博客介绍)。
注意事项:
(1).此BOOST电路模块是此驱动板中较为容易出问题的部分,因此焊接时需要先对其进行焊接调试,确认没有问题后再进行后续的焊接。
(2).此电路需要尤其注意0.22Ω的精密电流检测电阻,如果电阻质量不合格很容易出现问题,导致电路不能正常工作。
如有其他问题可参看此篇文章:MC34063升压电路中常见的几种问题
2.降压稳压电路
★降压稳压电路采用的是MIC5219这款LDO芯片。此电路模块将7.4V的输入电压降压稳压到3.3V给后面的74LVC245芯片供电。类似芯片较多,使用也较为简单。
如需要详细了解其工作原理,可参看此篇文章:LDO低压差线性稳压芯片的使用(LM1117)
3.隔离电路部分
在设计电机驱动板时,很多都会有一个用于隔离的电路模块。主要用于将控制器与H桥驱动电路隔离开,防止损坏控制器。
此电机驱动板采用了74lvc245这款三态输出的收发器芯片作为隔离芯片。也可以使用74HC125(三态四线非反相缓冲器)或74HC244(三态八线非反相缓冲器)。具体使用说明可参考相应的数据手册。
四.搭建的H桥驱动电路详解
1.简介
在学习此部分之前,需要先掌握基础H桥驱动的工作原理,具体可参看此篇博客:电机驱动芯片(H桥、直流电机驱动方式)
自行搭建的H桥驱动电路一般都包括两个部分:半桥/全桥驱动芯片和MOS管。自行搭建的H桥驱动所能通过的电流几乎由MOS管的导通漏极电流所决定。因此,选择适当的MOS管,即可设计出驱动大电流电机的H桥驱动电路。
2.NMOS管IRLR7843
在选择MOS管搭建H桥时,主要需注意以下一些参数:
★1.漏极电流(Id):该电流即限制了所能接入电机的最大电流(一般要选择大于电机堵转时的电流,否则可能在电机堵转时烧毁MOS管),LR7843的最大漏极电流为160A左右,完全可以满足绝大部分电机的需要。
★2.栅源阈值电压/开启电压(Vth):该电压即MOS管打开所需的最小电压,也将决定后续半桥驱动芯片的选择和设计(即芯片栅极控制脚的输出电压)。LR7843的最大栅源阈值电压为2.3V。
★3.漏源导通电阻(Rds):该电阻是MOS管导通时,漏极和源极之间的损耗内阻,将会决定电机转动时,MOS管上的发热量,因此一般越小越好。LR7843的漏源导通电阻为3.3mΩ。
★4.最大漏源电压(Vds):该电压是MOS管漏源之间所能承受的最大电压,必须大于加在H桥上的电机驱动电压。LR7843的最大漏源电压为30V。满足7.4V的设计需要。
3.半桥驱动芯片IR2104S
在H桥驱动电路中,一共需要4个MOS管。而这四个MOS管的导通与截止则需要专门的芯片来进行控制,即要介绍的半桥/全桥驱动芯片。
★所谓半桥驱动芯片,便是一块驱动芯片只能用于控制H桥一侧的2个MOS管(1个高端MOS和1个低端MOS,在前述推荐的博客中有介绍)。因此采用半桥驱动芯片时,需要两块该芯片才能控制一个完整的H桥。
★相应的,全桥驱动芯片便是可以直接控制4个MOS管的导通与截止,一块该芯片便能完成一个完整H桥的控制。
这里使用的IR2104便是一款半桥驱动芯片,因此在原理图中可以看到每个H桥需要使用两块此芯片。
1.典型电路设计(来源于数据手册)

2.引脚功能(来源于数据手册)

★VCC为芯片的电源输入,手册中给出的工作电压为10~20V。(这便是需要boost升压到12V的原因)
★IN和SD作为输入控制,可共同控制电机的转动状态(转向、转速和是否转动)。
★VB和VS主要用于形成自举电路。(后续将详细讲解)
★HO和LO接到MOS管栅极,分别用于控制高端和低端MOS的导通与截止。
★COM脚直接接地即可。
3.自举电路
此部分是理解该芯片的难点,需要进行重点讲解。从上面的典型电路图和最初的设计原理图中均可发现:该芯片在Vcc和VB脚之间接了一个二极管,在VB和VS之间接了一个电容。这便构成了一个自举电路。
作用:在高端和低端MOS管中提到过,由于负载(电机)相对于高端和低端的位置不同,而MOS的开启条件为Vgs>Vth,这便会导致想要高端MOS导通,则其栅极对地所需的电压较大。
补充说明:因为低端MOS源极接地,想要导通只需要令其栅极电压大于开启电压Vth。而高端MOS源极接到负载,如果高端MOS导通,那么其源极电压将上升到H桥驱动电压,此时如果栅极对地电压不变,那么Vgs可能小于Vth,又关断。因此想要使高端MOS导通,必须想办法使其Vgs始终大于或一段时间内大于Vth(即栅极电压保持大于电源电压+Vth)。
首先看下IR2104S的内部原理框图(来源于数据手册)。此类芯片的内部原理基本类似,右侧两个栅极控制脚(HO和LO)均是通过一对PMOS和NMOS进行互补控制。

自举电路工作流程图:
以下电路图均只画出半桥,另外一半工作原理相同因此省略。
假定Vcc=12V,VM=7.4V,MOS管的开启电压Vth=6V(不用LR7843的2.3V,原因后续说明)。
(1).第一阶段:首先给IN和SD对应的控制信号,使HO和LO通过左侧的内部控制电路(使上下两对互补的PMOS和NMOS对应导通),分别输出低电平和高电平。此时,外部H桥的高端MOS截止,低端MOS导通,电机电流顺着②线流通。同时VCC通过自举二极管(①线)对自举电容充电,使电容两端的压差为Vcc=12V。

(2).第二阶段:此阶段由芯片内部自动产生,即死区控制阶段(在H桥中介绍过,不能使上下两个MOS同时导通,否则VM直接通到GND,短路烧毁)。HO和LO输出均为低电平,高低端MOS截止,之前加在低端MOS栅极上的电压通过①线放电。

(3).第三阶段:通过IN和SD使左侧的内部MOS管如图所示导通。由于电容上的电压不能突变,此时自举电容上的电压(12V)便可以加到高端MOS的栅极和源极上,使得高端MOS也可以在一定时间内保持导通。此时高端MOS的源极对地电压≈VM=7.4V,栅极对地电压≈VM+Vcc=19.4V,电容两端电压=12V,因此高端MOS可以正常导通。
(此时,自举二极管两端的压差=VM,因此在选择二极管时,需要保证二极管的反向耐压值大于VM。)
注意:因为此时电容在持续放电,压差会逐渐减小。最后,电容正极对地电压(即高端MOS栅极对地电压)会降到Vcc,那么高端MOS的栅源电压便≈Vcc-VM=12V-7.6V=4.4V < Vth=6V,高端MOS仍然会关断。

补充总结:
★因此想要使高端MOS连续导通,必须令自举电容不断充放电,即循环工作在上述的三个阶段(高低端MOS处于轮流导通的状态,控制信号输入PWM即可),才能保证高端MOS导通。自举二极管主要是用来当电容放电时,防止回流到VCC,损坏电路。
★但是,在对上面的驱动板进行实际测试时会发现,不需要令其高低端MOS轮流导通也可以正常工作,这是因为即使自举电容放电结束,即高端MOS的栅源电压下降到4.4V仍然大于LR7843的Vth=2.3V。
那么在上述驱动板中,自举电路就没有作用了吗?当然不是,由于MOS管的特性,自举电路在增加栅源电压的同时,还可令MOS管的导通电阻减小,从而减少发热损耗,因此仍然建议采用轮流导通的方式,用自举电容产生的大压差使MOS管导通工作。
4.控制逻辑
时序控制图:

Chapter2 【电机驱动芯片(H桥、直流电机驱动方式)——DRV8833、TB6612、A4950、L298N的详解与比较】
原文链接:https://blog.csdn.net/qq_44897194/article/details/105524808
Chapter3 IR2104电机驱动
原文链接:https://blog.csdn.net/zhuimeng_ruili/article/details/104378131
一、IR2104的引脚定义:

芯片引脚意义(DataSheet)
SD信号为使能信号,高电平有效,芯片工作。
IN为高电平时HO为高,LO为低;IN为低电平时,HO为低,LO为高电平。我们的PWM信号就是在这里输入(因为片内自带了CMOS和LSTTL电平兼容器,可以直接输入而不用考虑电平转换)。
Vb是高侧浮动电源输入脚,HO是高侧门极驱动输出,Vs是高侧浮动电源回流。这三个控制上半桥的MOS导通。
Vcc是低侧浮动及参考电源输入脚,LO是低侧门极驱动输出,COM是低侧回流。这三个控制下半桥的MOS导通。
二、IR2104的内部原理:


这个驱动设计单从信号逻辑上分析比较容易理解,但要深入的理解和更好的应用,就需要对电路做较深入的分析,对一些外围元件的参数确定做理论分析计算。现在对内部结构进行简单的分析:
芯片被选中后,输入的信号经过死区/击穿保护电路后分两路分别送入上下两组CMOS电路。下路是“0”控制导通,直接送入信号;上路是“1”导通,先通过高脉冲电流缓冲级(high pulse current buffer stage)控制完成信号缓冲以及电平的转换(个人理解,因为上半桥电压来受外部电源影响,需要转换),再送入信号。
初始写0时:下路CMOS上管导通,LO由浮空抬压至芯片电源电位,因此LO和COM之间产生导通电压VCC,下半桥MOS导通;上路CMOS下管导通,HO和Vs短路,上半桥MOS关断。
当写1时,上路CMOS上管导通,依靠电容自举,HO和Vs间产生导通电压VCC,上半桥MOS导通;下路CMOS下路导通,LO和COM短路,下班桥MOS关断。
所以可见,IR2104电源电压必须大于选择的MOS或者IGBT管的导通电压,比如我们智能车电路里2104用的12V就大于LR7843的导通4.5V。
所以,作为控制MOS导通的门极驱动器,它最大也只过200多MA的电流,就给20mil足以。
三、半桥驱动原理分析

IR2104可以控制半桥的核心在于其Vb和Vs脚之间外接的“自举电容”。那么何谓自举呢?以典型电路为例:
此半桥电路的上下桥臂功率管是交替导通的。每当下桥臂开通,上桥臂Q1关断时Vs脚的电位为下桥臂Q2的饱和导通压降,基本上接近地电位。此时Vcc通过自举二极管对VB和VS间的自举电容C1充电使其接近Vcc电压。
当Q2关断时,基于内部的CMOS结构(具体见下面内部图),HO和Vs之间断开,HO和Vb之间导通。同时,Vs端的电压会升高,由于C1电压不能突变为Vcc,Vcc与Vb间又有自举二极管,因此Vb点的电位接近于Vs点电位和C1上电压之和。所以此时Vb(HO)和Vs之间的压差就为Vcc电压,利用这个压差就可以打开上桥臂。
总结一下:当Q1开通时,自举电容C1作为一个浮动的电压源驱动Q1(上桥臂MOS),导通上桥臂;而Q2开通后,Q1关断,Vs处的浮动电源消失,C1在开通期间损失的电荷在又会得到补充。如此循环,即可控制Q1和Q2进行半桥驱动。这种自举供电方式就是利用Vs端的电平在高低电平之间不停地摆动来实现的,由于自举电路无需浮动电源,因此是最便宜的。
因为自举电容器上的电压基于高端输出晶体管源极电压上下浮动,所以图中的D(自举二极管)和C1(自举电容)是IR2104在脉宽调制(PWM)应用时最需要严格挑选和设计的元器件。只有根据一定的规则进行计算分析,并在电路实验时进行调整,才能使电路工作处于最佳状态。
D是一个重要的自举器件,应能阻断直流干线上的反向高压,其承受的电流是栅极电荷与开关频率之积。同时为了减少电荷损失,应选择反向漏电流小的快恢复或者肖特基二极管。
芯片内高压部分的供电都来自图中自举电容C1上的电荷,所以为了保证高压部分电路有足够的能量供给,应适当选取C1的大小。
驱动原理图

四、全桥驱动原理分析

H桥是一个典型的直流电机控制电路,因为它的电路形状酷似字母H,故得名与“H桥”。4个mos管组成H的4条垂直腿,而电机就是H中的横杠。
1)电机驱动
电路首先,单片机能够输出直流信号,但是它的驱动才能也是有限的,所以单片机普通做驱动信号,驱动大的功率管如Mos管,来产生大电流从而驱动电机,且占空比大小能够经过驱动芯片控制加在电机上的均匀电压到达转速调理的目的。电机驱动主要采用N沟道MOSFET构建H桥驱动电路,H 桥是一个典型的直流电机控制电路,由于它的电路外形酷似字母 H,故得名曰“H 桥”。4个开关组成H的4条垂直腿,而电机就是H中的横杠。要使电机运转,必需使对角线上的一对开关导通,经过不同的电流方向来控制电机正反转,其连通电路如图所示。

2)H桥驱动原理
实践驱动电路中通常要用硬件电路便当地控制开关,电机驱动板主要采用两种驱动芯片,一种是全桥驱动HIP4082,一种是半桥驱动IR2104,半桥电路是两个MOS管组成的振荡,全桥电路是四个MOS管组成的振荡。其中,IR2104型半桥驱动芯片能够驱动高端和低端两个N沟道MOSFET,能提供较大的栅极驱动电流,并具有硬件死区、硬件防同臂导通等功用。运用两片IR2104型半桥驱动芯片能够组成完好的直流电机H桥式驱动电路,而且IR2104价钱低廉,功用完善,输出功率相对HIP4082较低,此计划采用较多。

另外,由于驱动电路可能会产生较大的回灌电流,为避免对单片机产生影响,最好用隔离芯片隔离,隔离芯片选取有很多方式,如2801等,这些芯片常做控制总线驱动器,作用是进步驱动才能,满足一定条件后,输出与输入相同,可停止数据单向传输,即单片机信号能够到驱动芯片,反过来不行。
五、电感电流回流路径的建立
在电机在关闭之后,电机作为感性负载会产生反电动势,这个时候如果让h桥的两个下桥都导通,就会产生一个回路,将反电动势消耗掉

六、自举电容容值的计算与自举二极管选型:
自举二极管D必须使用与功率开关管相同耐压等级的快恢复二极管;
自举电容设计也至关重要,C1的耐压比功率器件充分导通时所需的驱动电压(典型值为10 V)高。若在C1的充电路径上有1.5 V的压降,且假定有一半的栅压因泄露而降低,则自举电容C1可按式(4)来选取:

式中:Qg为MOSFET的门极电荷。
工程应用上一般取C1>2*Qg/(VCC-10-1.5),且应选取容量稳定,耐脉冲电流的无感电容。
七:mos管发热可能的问题
1、电源振铃引起发热
之前设计的有刷直流电机驱动电路,采用的是IR2104半桥驱动器去驱动H桥功率电路,电路使用的都是经典的芯片厂商提供的设计方案,可是出现了一个糟糕的问题,电路就算不带载,功率管也发烫的厉害,要是带载则夸张的发热,能达到100℃以上,太恐怖了。为了这个问题,排查了整整一天多时间,百思不得其解,最后通过各个点的波形测试,发现问题出在电源受到功率管开关的影响,产生了极大的波动,导致电源产生振铃现象,峰值电压超过电源电压的3倍。从而导致了功率管DS,GS间的电压时常超过耐压值,和影响了IR2104S的驱动波形,导致上下臂直通现象的出现。
解决方法:在功率电路H桥电源处加一个合适的滤波电容,一般10uF以上,去除电源干扰问题,从而彻底解决驱动电路问题。注意选择的不同的MOS管,需要的滤波电容容值也会相应的改变,必须做出调整。
2、死区时间异常引起发热
IR2104死区时间异常,引起mos管空载发热 https://blog.csdn.net/zhuimeng_ruili/article/details/110354269
八: 推荐阅读
MOS管防护电路实测:https://blog.csdn.net/zhuimeng_ruili/article/details/108979413
IR2104死区时间异常,引起mos管空载发热 https://blog.csdn.net/zhuimeng_ruili/article/details/110354269
吐槽一小下:
调试mos管真的是一个又费时间又费钱的活啊,慢慢的磨掉你的耐心,啊。。。。下图是这个项目中烧掉的mos,还只是其中的一小半,前面的都没有收集,粗略估计目前为止大概烧了三四百颗mos,一颗三块。。。。啊,继续烧板子吧。。。。
Chapter4 HIP4082电机驱动电路详解
原文链接:https://blog.csdn.net/RedValkyrie/article/details/105463217


一、原理图
以下内容是我在14届小白四轮组里使用到的驱动原理图,因为突然回顾以前做过的这个驱动电路,所以记录一下防止遗忘。以下只列出以下主要电路:

二、化简电路再做分析的前提
前提,我们先明确以下知识点,再来把无关器件省略掉,分析主干电路。
- MOS管导通的实质是对GS结电容充电,在上图所示的原理图我在G级串联一个电阻是为了限制充电速度,防止充电过快产生震荡。
- 栅极电阻一般串联一个10欧左右的电阻,GS级之间一般并联一个10K的电阻用来关断期间结电容的放电。
- 与MOS管并联的二极管是不必要的,因为MOS管内部集成了二极管,即体二极管。
在不考虑串联的10欧姆左右的电阻以及GS级并联的10K欧姆的电阻,还有MOS管外面另外并联的二极管,电路简化至下图作分析:

三、分析一下自己的理解
< 1 > 引脚说明


< 2 > MOS管的高端驱动和低端驱动
所谓的高边驱动或者低边驱动,指的是在电子电路驱动负载时,当需要控制开关时,开关所处电路的位置。“高”指的是“电源”,“低”指的是“地”。

低边驱动简单的理解为:负载的一端默认与电路的正级即电源保持连接,负载的另一端与开关连接,当开关导通时,负载的另一端与地连接,负载开始工作,当开关与关断时,负载的另一端与地断开,负载停止工作。低边驱动/开关英文:Low Side Drivers,简称为LSD。具体到使用MOS管作为开关的情况的时候,MOS管相对于负载在电势的低端,其中D通过负载接电源,S直接接地。
对于NMOS管,只有当Vgs大于开启电压时,MOS管才能导通。所以当未导通时,S处于一个不能确定的电位。若让Vgs大于开启电压,则DS导通,S确定为地电位,此时仍可以保证Vgs大于开启电压,保持DS导通。

对于PMOS管,只有到Vgs小于一个值,MOS才能导通。此时S处于一个不确定的电位。若让Vgs小于开启电压,即使导通了,S确定下降到地电位,就不能保证Vgs小于开启电压。

高边驱动简单的理解为:负载的一端默认与电路的负级即地保持连接,负载的另一端与开关连接,当开关导通时,负载的另一端与电源连接,负载开始工作,当开关与关断时,负载的另一端与电源断开,负载停止工作。高边驱动/开关英文:High Side Drivers,简称为HSD;具体到使用MOS管作为开关的情况的时候,MOS管相对于负载在电势的高端,其中D直接连接电源,S通过负载接地。
对于NMOS,只有当Vgs大于开启电压时,MOS管才能导通。所以当未导通时,S处于一个不能确定的电位。即使让Vgs大于开启电压,DS导通后,DS电位相等,同为电源电位,除非G极电位比电源电位还高,则不能保持导通状态。

对于PMOS,只有到Vgs小于一个值,MOS才能导通。此时S处于一个不确定的电位。若让Vgs小于开启电压,使DS导通,DS同为电源电位,还是能保持Vgs小于开启电压,是MOS保持导通状态。

总结:PMOS适合作为高端驱动,NMOS适合作为低端驱动。但是由于工艺等各方面的原因。在大电流情况下,通常仍把NMOS作为高端驱动。于是,为了保证高端驱动的NMOS的Vgs保持大于开启电压。我们会使用半桥驱动芯片。半桥驱动芯片把高端驱动的NMOS的S极作为参考地,输出一个恒定的开启电压,来控制MOS的导通。
< 3 > 电机驱动电路分析
如上图所示电机驱动原理图,我采用的是HIP4082全桥驱动芯片。将高端驱动的NMOS作为参考地。

因为我们是用的是NMOS管,所以当Ugs的电压大于开启电压,MOS管才被导通,而我在此处采用的自举的方式,输出一个恒定的开启电压,来控制MOS管导通。
下面解释一下,在HIP4082驱动芯片这边的自举电路原理:

首先BHS引脚里的HS指的是High S极,也就是上管Q5的S极,可以看到此处下管Q7的S极是接地的,所以如果下管Q7处于导通状态的时候,BHS引脚,也就是上管Q5的S极就相当于接地了,这时BHS的电压也就是上图Q5的S极的电压。
这个时候,外部电源通过自举二极管向自举电容充电。
在处于目前下管Q7导通,上管Q5关闭的状态的时候,此时外部电源通过二极管和自举电容给电容充电,然后BHB和BHO引脚处于短接状态,此时上端MOS管Q5导通。

我们先假设这里C10充满电就是12V,因为BHB和BHO短路,此时自举电容充的电就通过BHS举给了BHO,所以BHB和BHO的电压是一样的。然后此时Q5的S级接地,忽略掉R13的时候电压约为12V,相当于Vgs之间是接了一个恒定的电压来保持这里NMOS管的必然导通。此处就是通过自举出来一个恒定的电压来确保Vgs的电压大于MOS管的导通电压解决了上面提到的当NMOS为高端驱动时的导通状态不确定的问题。
经过以上环节之后,上管Q5导通,下管Q7关闭,此时BHB和BHO就不处于短接的状态了,由于电容充满电了,BHB的电压是比BHS的电压高的。此时我手绘了一下电路如下图:

以上就是自举电路的原理。
值得注意的是:
正是因为这里自举电容只能在下管Q7导通的时候充电,所以一般的NMOS桥驱动都不能输出百分之百的占空比。你可以这么理解,就是此时电容里的电是维持上管Q5持续导通的,比如我假设的这里电容充满电之后电压是12V,但是总有时候电容里的电是会放光的,此时自举电容电没了就举不动了,这个时候上管Q5就关闭了,而这个过程是慢慢的,可能会导致上管的G极电压出现非饱和区和截止区,造成上管gg,所以一般限制占空比最高在 95 % 到 98 % 95%\ 到\ 98%95% 到 98% 。然后上管Q5关闭之后,Q7导通,继续给电容重新充电。然后循环这个过程。
上图只是我们使用的某一款驱动芯片,下面列出的是通用解释自举电路内部原理的图,其中Vbs(驱动电路Vb和Vs管脚之间的电压差)给集成电路高端驱动电路提供电源。该电源电压必须在10-20V 之间,以确保驱动集成电路能够完全地驱动MOS栅极器件。Vbs电源是悬浮电源,附加在Vs电压之上(Vs通常是一个高频的方波)。有许多方法可以产生Vbs悬浮电源,其中一种如本文中介绍的自举方式。这种方式的好处是简单、低廉,但也有局限性。占空比和开通时间受限于自举电容的再充电(长时间导通和大占空比时要求有充电泵电路支持,详见AN-978C了解):

对于含有自举电路的PCB布板方法,需要注意自举电容要尽可能靠近IC的管脚。如下图所示,至少有一个低ESR的电容提供就近耦合。例如:如果使用了铝电解电容做为自举电容,就应再用一个瓷电电容。如果自举电容是瓷电或钽电容,自己作为就地耦合也就足够了。

< 4 > 具体到通过PWM控制电机占空比
首先列出HIP4082芯片引脚的真值表:
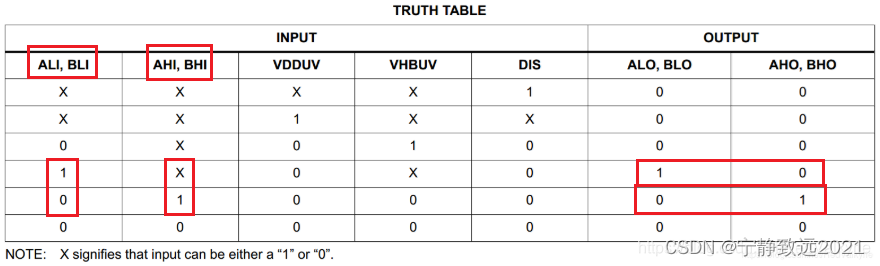
首先看看DIS引脚,这个引脚的作用是控制芯片是否工作的。我当初接的是低电平,也就是芯片一直保持工作。但是它也可以接一个IO口,让GPIO输出高电平或者低电平来控制芯片是否工作。
再看BHO和BLO的引脚,我的理解是,B表示这个芯片控制的其中一个半桥的引脚开头字符,A就是另外一个半桥引脚的开头字符,H(high)表示的上管,L(low)表示的是下管,O表示的是ON,也就是打开的意思。通过真值表我们可以看到,这里以B开头的半桥引脚为例:
- 当BLI为高电平的时候, 意思也就是比如我现在给的 90% 的占空比,他处于高电平的那段时间,此时无论BHI接的什么电平,此处接的是12V高电平,这个时候下管是关闭的,上管是导通的,也就是这段时间用来给电机以 90% 的占空比输出。
- 当BLI为低电平的时候, 也就是 90% 占空比的另外 10%处于低电平的时间段,若BHI为高电平的时候,此时上管关闭,下管导通,也就是这段时间去给自举电容充电。