摄影测量-笔记(理解篇)
1、基本原理
基于测量中的前方交会原理。
在两个已知点上分别拍摄一张影像,通过人眼观测(一只眼睛观察一张影像上的同名点a1和a2),就能得出空间对应点A的坐标。空间景物通过传感器构像,再用人眼观察构像的像片产生生理视差;重建空间景物的立体视觉,所看到的空间景物称为立体影像,产生的立体视觉称为人造立体视觉。
摄影像片是被摄物的中心投影。

2、共线方程
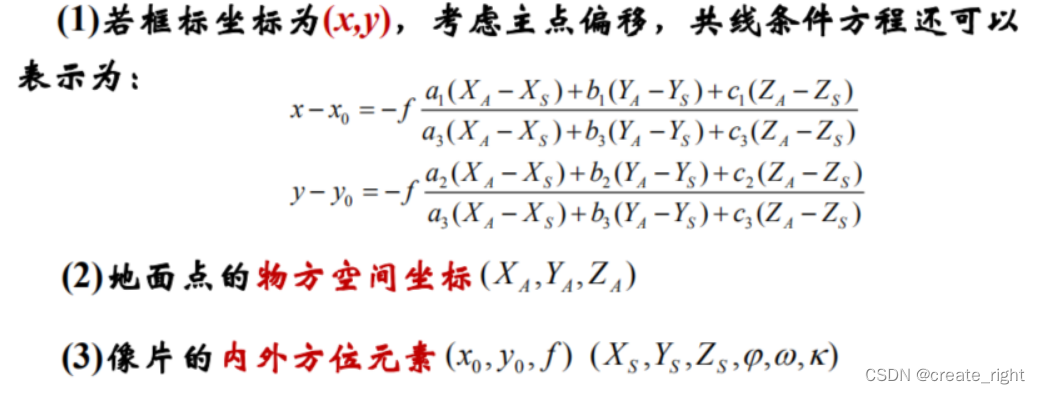
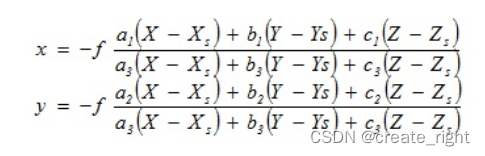
定义:摄影瞬间像点、投影中心、物点位于同一条直线上,描述这三点共线的数学表达式称之为共线条件方程。
共线条件方程涉及下列三种坐标系:
像空间坐标系
像空间辅助坐标系
地面辅助坐标系
像点a和地面点A在像空间辅助坐标系中共线。
有任意已知两者的参数,可以求解出第三方的参数。
3、关于五大坐标系的理解
摄影测量五大坐标系分别为像平面坐标系、像空间坐标系、像空间辅助坐标系、摄影测量坐标系、物坐标系。要知道五大坐标系的作用,必须要理解坐标的空间转换原理,在此不展开叙述。
通过定义不同的辅助坐标系或过滤性坐标系,且经过层层空间转换,最后会得到上述的共线方程式,将框标坐标系和物空间坐标系(可以投入生产使用的坐标系)联系在一起,通过几个地面已知点,可以求解其中的参数。
4、 单像空间后方交会(忽略主点偏移)
单像空间后方交会是一种已知影像覆盖范围内一定数量、分布合理的控制点的空间坐标与像方坐标,反求该影像外方位元素的方法。
根据共线方程,并将其线性化,可以用来求解外方元素。