JVET-AD0081:一种基于外推滤波器的帧内预测模式
本提案提出了一种基于外推滤波器的帧内预测(extrapolation filter-based Intra Prediction,EIP)模式。首先,利用预定模板从当前块的相邻重建像素获得外推滤波器系数。然后,在当前块内从左上到右下逐位置地处理外推,以生成预测块。
所提出的EIP模式分为以下三个步骤:
1.搜索 均值以及最大值和最小值
与CCCM模式类似,在向EIP滤波器提供输入时,应去除平均值。当前块的DC模式值用作EIP预测的平均值,计算如下图所示:

从相邻十三列和十三行的重建区域中的重建像素中搜索最小值和最大值。

2. 推导EIP滤波器系数
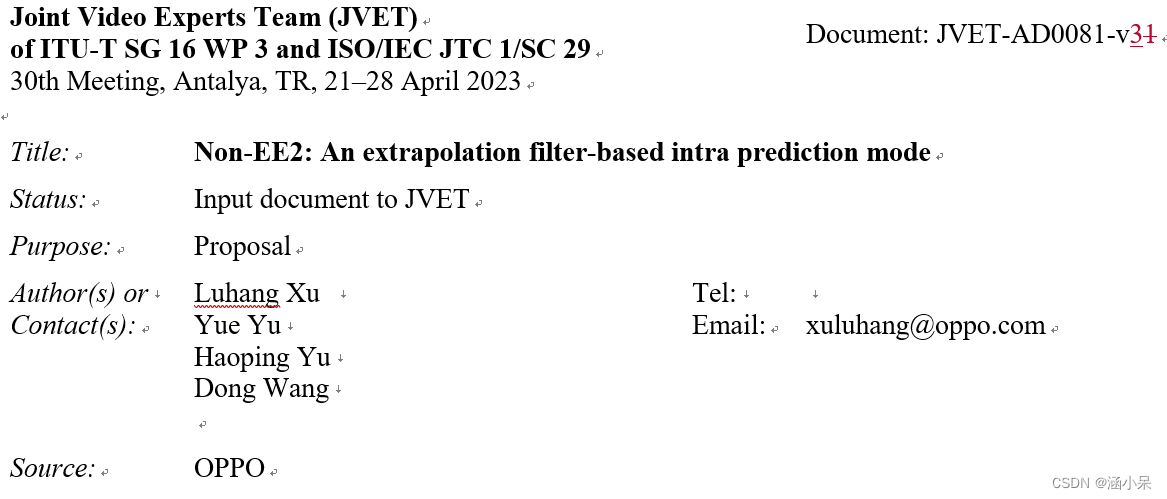
滤波器系数是通过相邻已经重建区域的像素推导得到的,本文提出了三种类型的重建区域和三种滤波器形状,三种相邻的重建区域如下图所示
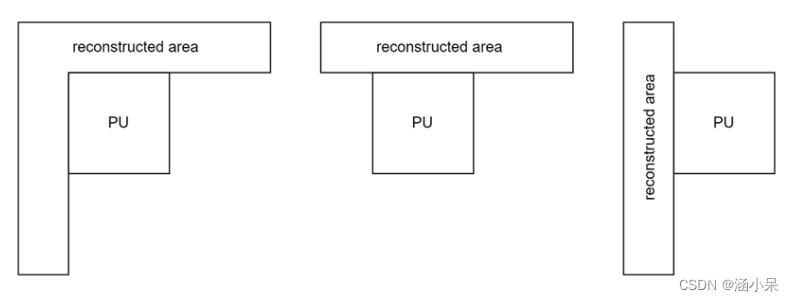
所使用的的三种滤波器形状如下图所示,所选滤波器以一个像素的步长在所选重建区域中滑动,以收集 EIP 的输入像素和输出像素,并在计算滤波器过程中去除均值。通过最小化MSE的方法求解EIP系数。

3. 计算预测像素
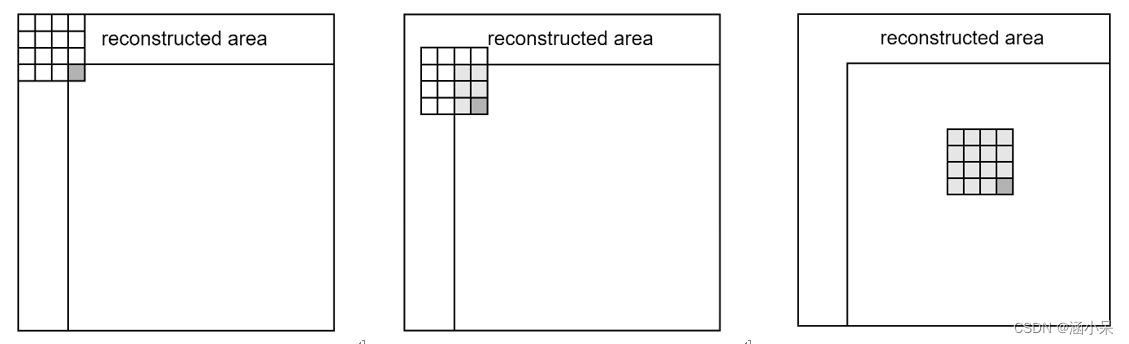
EIP模式逐位置预测当前区块位置,如下图所示。
- 对于位于当前块左上角的位置,EIP滤波器的输入是重建样本。
- 对于位于当前块边界上的位置,EIP滤波器的部分输入是参考样本,EIP过滤器的部分输入则是先前预测的样本。
- 对于当前块中的其他位置,EIP滤波器的输入是先前预测的样本。
为了减少预测误差应用第一步搜索到的最小值和最大值来限制每个预测值的输出范围

- pred(x,y)是当前块中(x,y)处的预测值
- min和max从十三个重构的列和行中搜索最小值和最大值,
- Ci是导出的EIP滤波器的第i个系数,
- t_((x-xoffset,y-yoffset))是用于当前位置的预测的重建或预测值,
- mean是通过DC预测模式计算出的值。
通过上述过程可以计算得到EIP模式的预测值。
其性能在ECM8.0上的表现如下表所示:

该提案提出的预测模式和AV1标准中的递归滤波模式原理类似,都是通过滤波器系数逐像素计算预测值,不同的是,AV1中的递归滤波模式中的滤波器系数是固定预先存储在内存中的,而本提案提出的EIP模式则是根据编码块相邻重建重建像素计算得到的,更具有灵活性,挺有意思的想法。