第4节、电机多段转动【51单片机+L298N步进电机系列教程】
↑↑↑点击上方【目录】,查看本系列全部文章
摘要:本节介绍用控制步进电机三个主要参数角度、速度、方向,实现简单的步进电机多段控制
一、目标功能
输入多个目标角度,以及每个角度对应的速度,实现步进电机的多段多速度转动
二、计算过程
2.1 简化C与n函数关系
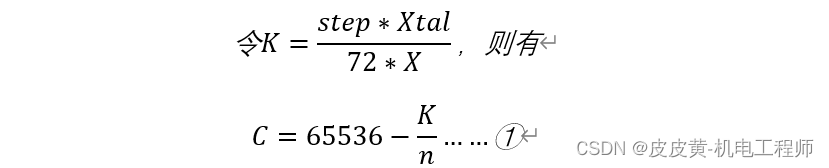
根据上一节内容,定时器初值与速度函数关系为

硬件系统确定后,angle、Xtal、X均为定值,为降低计算量,将公式中可以提前计算好的地方直接计算出来
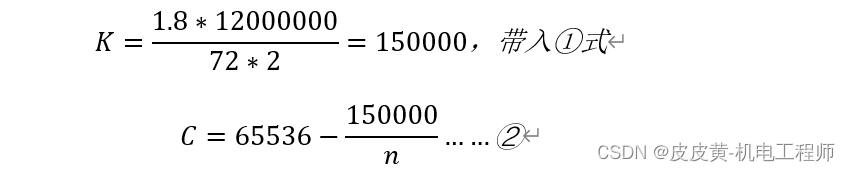
根据硬件设置情况,step=1.8,Xtal=12000000,X=2,计算K值
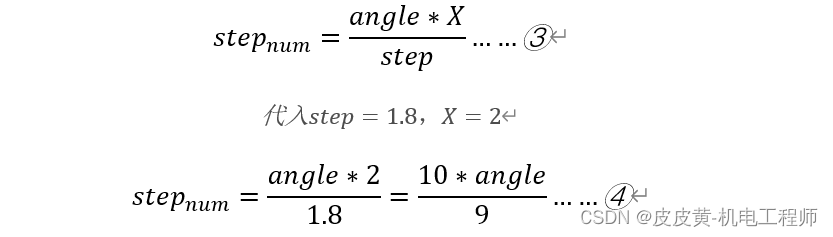
2.2 计算步数(step_num)与角度(angle)函数关系
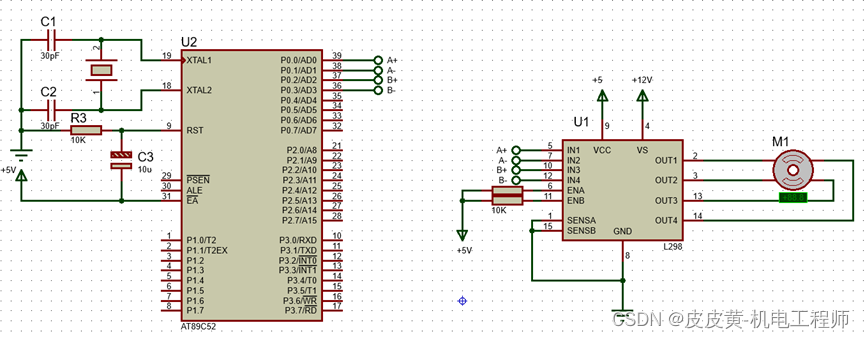
三、proteus仿真及实测
四、总结
此种方式利用定时器精确定时能力,从而控制电机转速,同时实现步进电机的多段运动,至此实现了步进电机三个主要参数角度、速度、方向的简单协同操作
五、附件
proteus仿真文件百度网盘链接:
链接:https://pan.baidu.com/s/1T6HvEFQ82mGb-ygEWzrj3A
提取码:fmn7
Keil工程文件获取链接:
https://item.taobao.com/item.htm?ft=t&id=764275949550