6-3、T型加减速单片机程序【51单片机+L298N步进电机系列教程】
↑↑↑点击上方【目录】,查看本系列全部文章
摘要:根据前两节内容,已完成所有计算工作,本节内容介绍具体单片机程序流程及代码
一、程序流程图
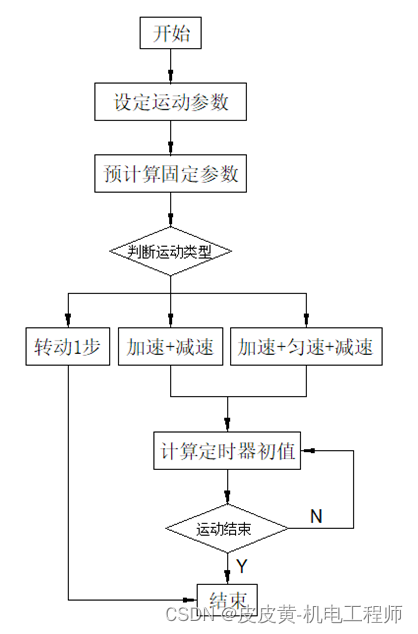
根据前两节文章内容可知,T型加减速的关键内容是运动类型的判断以及定时器初值的计算,在输出运动参数后即可判断出运动类型,再根据运动类型在主循环程序中计算定时器初值,在定时器中断中判断各运动阶段是否完成,最终实现T型加减速过程,程序流程图如下所示
二、误差分析
在动态计算的过程中,由于51单片机没有硬件乘、除法器,下述定时器初值的递推计算耗时最多,为尽量提升性能,将此步计算放入了主循环中,以节省定时器中断计算量

在12Mhz,12T模式下,STC89C52RC单片机实测控制最高转速约为200RPM,最大的瓶颈在于51单片机的主频速度实太慢,此处可以勾选STC单片机特有的6T双倍速模式,电机的转速上限会有明显的提升
三、proteus仿真及实测



四、总结
上述代码实现了步进电机采用T型加减速的方式转动5圈,输入参数有转动角度,加速度、最大角速度。其中转动角度的单位是0.1°,例如输入100,实际代表转动10°。此种控制方式相对于S曲线加减速灵活性更高,可以实现加减速大小的实时调节,灵活性较好,同时可以大幅节省data资源
五、附件
proteus仿真文件百度网盘链接:
链接:https://pan.baidu.com/s/1KWIqw1Zg_G91-_hFKTm_AQ
提取码:6soj
Keil工程文件获取链接:
https://item.taobao.com/item.htm?ft=t&id=764321827917