基于单片机的模糊PID炉温控制系统设计
摘 要
电热炉是在工业热处理的生产中广泛使用的一种设备,电热炉的温度控制系统存在时变性,非线性,滞后性等特征,难以用常规PID的控制器对系统达到很好的控制效果。当控温精度的要求高时,使用传统的控制理论方法难以达到理想控制效果。因此,将模糊控制规则加入对PID参数的调整,使炉温的控制效果得到良好的提升。
本文借助MATLAB下的Simulink工具箱来对照观察仿真图像,对常规PID控制和模糊PID控制方法进行仿真的分析。通过实验结果可以看出当采用常规PID进行控制时,只能满足最基本的控制要求,但存在许多缺陷像超调量大、前期震荡大等。采用模糊PID控制时,系统的控制变得更加稳定,调节时间缩短且超调量小等性能指标,模糊PID控制方式比传统PID控制方式有更加出色的控制效果,最终希望模糊PID控制方式在实际中有更深入的应用,促进本理论在控制炉温应用方面的推广和发展。
本文在硬件的设计上,给出了硬件系统各个模块的设计,系统以AT89C51位核心,研究一种基于模糊PID控制的温度控制系统。
关键词 模糊PID 仿真 温度控制 AT89C51单片机
Abstract
Electric heating furnace is a kind of equipment which is widely used in the production of heat treatment industry, electric heating furnace temperature control system in the presence of degeneration, and the nonlinear, hysteretic characteristics, it is difficult to conventional PID controller on the system reached a good control effect. When temperature control accuracy is high, the ideal control effect is difficult to achieve with the traditional control theory… Therefore, the fuzzy control rule is added to the PID parameter adjustment, the control effect of temperature to get good ascension.
With the help of MATLAB Simulink toolbox to control observation under simulated images on conventional PID control and fuzzy PID control method simulation analysis. The experimental results can be seen when using conventional PID control, we can only meet the most basic control requirements, but there are a number of drawbacks as large overshoot, pre-shock and large. When using fuzzy PID control, control system becomes more stable, adjust the time by a small overshoot and other performance indicators, fuzzy PID control has better control performance than traditional PID control, and ultimately hope fuzzy PID control method in actual there are more in-depth application, to promote this theory in furnace temperature control applications in the promotion and development.
In this paper, hardware design, each module is given hardware system design, system AT89C51-bit core, the development of a temperature control system based on fuzzy PID control.
Keywords Fuzzy PID Simulation Temperature Control AT89C51 Microcontroller
目 录
摘要…………………………………………………………………………………I
Abstract…………………………………………………………………………II
1 绪论……………………………………………………………………………1
1.1课题研究目的和意义…………………………………………………………1
1.2对国内外发展现状的追踪……………………………………………………2
2 模糊控制的原理………………………………………………………………3
2.1 模糊控制系统………………………………………………………………………3
2.1.1 模糊控制系统的基本概念……………………………………………3
2.1.2 模糊控制系统组成……………………………………………………4
2.1.3 模糊控制基本原理……………………………………………………4
2.2 模糊PID复合算法……………………………………………………………5
2.3 PID控制器……………………………………………………………………6
2.3.1 PID控制的发展…………………………………………………………6
2.3.2 PID控制理论……………………………………………………………6
2.4 PID参数对系统的影响………………………………………………………7
2.5 PID控制方法的优缺点………………………………………………………8
3 MATLAB简介…………………………………………………………………10
3.1 MATLAB的概述………………………………………………………………10
3.2 SIMULINK仿真工具简介……………………………………………………10
3.3 SIMULINK仿真流程…………………………………………………………11
4 电热炉的温度的模糊PID智能控制算法与仿真实验………………12
4.1 模糊PID温度智能控制器设计 ……………………………………………12
4.2模糊PID控制算法仿真实验研究……………………………………………14
4.3 PID温度控制与模糊PID温度控制的仿真比较……………………………17
5 模糊PID系统的温度控制的硬件设计…………………………………19
5.1 系统硬件电路的构成 ……………………………………………………………19
5.1.1 采样电路…………………………………………………………………19
5.1.2声光报警电路……………………………………………………………20
5.1.3按键与显示电路设计……………………………………………………21
5.1.4 A/D转换模块 ……………………………………………………………22
5.2 单片机系统电路 ……………………………………………………………23
6 总结…………………………………………………………………………………25
附录…………………………………………………………………………………26
致谢………………………………………………………………………………………27
参考文献………………………………………………………………………………28
1 绪 论
1.1 课题研究目的和意义
在日常的工业生产过程中,有各式各样的被控对象,在科学实验和日常工业生产的过程中温度是一个必须的物理参数。为了提高生产效率,需要对系统诸如温度、液位、空气流速等主要参数进行必要的控制。温度控制在生产中占有比较大的比重,主要在测温与控温两个方面。温度控制的核心部分是对温度进行测量,已有比较成熟的技术。在对于温度的控制方面,随着控制对象涵盖的东西越来越多,还存在着各种各样的不足。现在科学研究领域的一个重要方向是如何提高系统的控制性能,实现对不同系统的控制要求。温度控制通常意义上指的是对一个固定的空间中的温度实行控制和调节,使其满足特定的工艺过程指标。对于电锅炉工作温度的控制方法是本文的主要研究目标[1]。
电锅炉是一种可以把电能转化为热能的装置,它拥有简单的构造、自动化程度较高、污染低等特点。和传统的通过燃烧煤与石化产品来工作的锅炉相比还具有操作方面、投资少、占地面积小、能量转化率高、热效率高等优点[2]。近年来,供热采暖设备已经大部分采用电锅炉。
锅炉控制是典型的过程控制的一种,具有惯性大延迟高的动态特性特点,并且还有非线性的特性[3]。目前基本采用开关来控制或者是通过人力对电热锅炉进行控制。使用这些方法会让系统无法具有良好的稳定性,会具有很高的超调量,同时无法对外界环境的变化做出及时的响应,系统的实时性效果差。并且高频率的切换开关会使电网产生一定的波动,不仅使系统能够产生的经济利润变少,还会使缩短锅炉的寿命[4]。
通过模糊集合论,将人在操作时的控制策略通过算法语言转变成计算机能够接收的算法。但它控制的输出是确定的,它可以实现控制,还能模拟出人类的思维方式,以此控制一些不能通过数学模型描述的对象。“模糊概念”更符合人思维的观察,理解和运行的方式,也与客观对象和事物的模糊性相符。“模糊控制”的特点就是通过“语言型”决策来控制系统。所以,研究出一种能够提高系统的效益,增加系统的稳定性的电锅炉的控制方法非常必要。
1.2对国内外发展现状的追踪
伴随着计算机的控制技术越来越完善,温度控制已经广泛的应用于工业的相关生产领域,还产生了很高的利润与社会资源[5]。随着所属领域的变化,系统对应的环境、目标还有成本等要求是不同的,所以有必要依要求的具体条件来设计对应的系统,才能使控制的效果最好,在商业运营和工厂实际的生产中对恒温环境进行自动化控制是非常重要的一个课题的研究。
当前我国在关于恒温控制技术的发展水平基本是二十世纪八十年代的水准,基本以生产点位控制和常规的PID的控制器为主[6]。这种控制器只可以用于对一般的温度系统进行控制,对复杂的、时变的和有滞后特性的系统的温度方面难以完成控制。对于需要使用智能化和自适应来对系统进行控制的场合,国内的技术还达不到相应的要求,很少有能组成产业链并能够广泛得到使用的控制仪表。从不同的方面来看,国内用于恒温箱的仪器和仪表还有着很大的不足[7]。由于长时间无法解决控制器的稳定性,对我国相联系的产业发展产生不利的影响。我国自产的大型仪器还没有办法达到一定的水平,我国需要的恒温箱基本依靠从国外进口。为了让一口恒温箱为基础的产业可以得到长足的发展,衡阳必要对恒温箱进行相应的研究。国外的恒温箱的系统有非常大的发展,而且在系统的智能化和参数的自整定等方向上有非常多的技术成果。主要以美日德还有瑞典等国家在这方面有非常领先的技术,还都生产了相匹配的具有非常优良性能的温度的控制器和对应的仪器仪表[8]。现在,国际上的温度控制系统对应的仪表正在向高精度、高智能,小体型等方向上研发,所以,我国目前在恒温控制相关仪器生产行业和国际上还是有一段的距离。
2 模糊控制的原理
2.1 模糊控制系统
2.1.1 模糊控制系统的基本概念
在实际控制系统中,一个有多年工作经历的操作工,不需要对整个系统有任何了解,就可以依靠经验采用相应的操作来完成系统的控制工作。
通过仪表获得的信息,使操作者对当前的系统的状态有一定的了解。操作者通过感官获得信息传递给大脑,之后在大脑中产生对应的描述,凭借自己的相关操作经历,对系统进行相对应的控制。
模糊控制系统通过相应的模糊控制器来进行决策,通过不同的输入信息来让模糊控制器做出对应的模糊决策,然后输出一个对应的模糊量,接着将接收到的信息量进行相应的精确化处理,最后将处理过的信息作用在被控对象上。这通过这种办法,可以将系统的不稳定性进行降低,因为当一个模块控制出现问题的时候,还有其他的控制规则可以对该模块进行相应的补偿控制,使系统虽然不是在最佳状态下进行控制,但仍然可以进行正常的运转。
2.1.2 模糊控制系统组成
模糊控制系统如图2-1所示
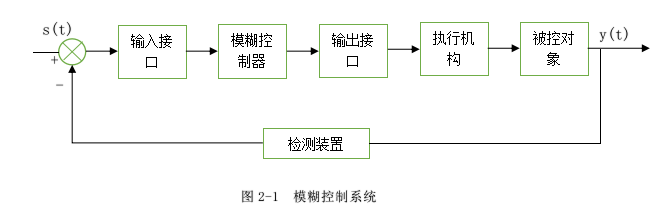
模糊控制的系统基本由以下五个部分构成:
(1)模糊控制器。它是组成模糊控制系统的不可或缺的核心部分。根据实际被控对象的不同条件,每个被控对象都有各自的动态和静态特性 ,需要有专门的控制系统来对应于被控对象匹配的控制规则,以此构造不同的控制器。
(2)输入-输出接口。通过输入接口获得当前状态下被控对象的信息,信息是数字信号信息,将从对应的模糊控制器传输过来的数字信号进行对应的转换,使信号转化成可以被被控对象接收识别的模拟信号。
(3)执行结构。执行部分由各种类型的电动机提供动力。
(4)被控对象。由被控制的机器设备或者过程组成。
(5)检测装置(传感器)。检测装置的功能是把从被控对象或者是在各种控制过程中检测到的被控量进行对应的转化,把相应的信息转变成电信号。传感器的精度直接关系到整个系统的精度,因此,要根据系统的具体需求和成本,尽量挑选条件允许范围内稳定性好精度高的传感器。
2.1.3 模糊控制基本原理
模糊控制基本原理如图2-2所示,模糊控制器是它的核心部分,即图中线框部分。
通过计算机的程序来建立系统对应的模糊控制器的控制规则,相关的基本原理是:通过终端采用微机获得被控量的精准的值,将给定的系统值与的传输来的值进行对比获得偏差信号e。在一般情形下,控制系统中模糊控制器会员一个输入量被设置为偏差信号e,将这个信号的值进行专门的模糊化处理,将信号的值转换成相应的模糊量,用对应的模糊语言来描述偏差信号e的模糊量,得到一个关于偏差e的模糊语言集合的子集。再通过获得的模糊子集、对应的模糊关系与前项推理进行相应的模糊化推理,就可以获得的模糊控制量是:u=E*R,式中u是一个模糊量。
为了使被控对象得到精准的控制,需要把系统中得到的模糊量u进行相应的处理,使其转变成精确量,这个操作称作解模糊或清晰化。将从系统中获得的用数字表示的精准的控制量进行D/A转换之后得到的模拟量输送给系统对应的执行机构,由此实现对被控对象进行第一步的控制。接着中断,在获得下次采用的信息后,进行对系统的控制。通过这种方式进行循环,以此来实现系统对被控对象进行模糊控制
由上可得,模糊控制的过程可分为以下步骤:
(1)依据从采样中得到的系统的输出值,以此来进行相应的计算,得到当前的系统对应的输入量的值;
(2)把得到的输入变量的精确值转化为对应的模糊量;
(3)通过模糊推理相应的准则依据输入变量和模糊控制的规则推算出输出系统对应的控制量(模糊量);
(4)依据得到的模糊量对系统的执行机构进行控制。
2.2 模糊PID复合算法
在系统是时变的情形下,如果系统采用的是PID算法,系统没有能力获得相对合理的结果。如果系统是时变的,那么将调整好对应参数的PID控制器加入到这个系统时,无法得到非常好的对系统的控制效果,会让系统变得不稳定。虽然对被控对象的特性具有相应的处理能力,对噪声也拥有较强的消除抗扰的能力,Fuzzy却没有对应的能力来消除系统的稳态误差,没有办法达到当前系统所需要的控制要求,所以只采用模糊控制并不能在对系统进行控制的过程中获得很好的控制效果。通过用Fuzzy-PID复合来控制系统就可以解决这些缺点。
在常规的PID之上进行完善修整出Fuzzy-PID的控制器,通过Fuzzy集合的理论计算出对应参数KP、 KI、KD和相应的误差变化Ec之间的关系可以用函数表示为:
Kp= f1(E,Ec),Kr= f2(E,Ec),KD= f2(E,Ec) (2-1)
并依据不同的E和Ec在线自整定的参数KP、KI、KD的控制器。
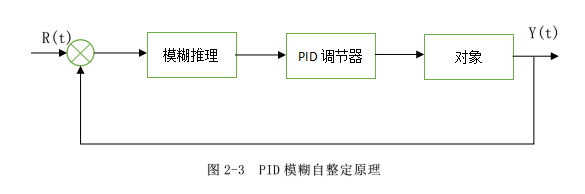
PID参数自整定系统的运行中不间断的对E于Ec的值进行测量,依靠不一样的E、Ec和在线自整KP、KI、KD参数,来实现在不一样的情况下对系统控制的对应的参数不同条件,来满足被控对像是E和CE时,对应的控制参数的变化,让 被控对象获得比较适用的动态和静态系统性能,以此来增加控制系统在实际应用中,对于被控系统出现状况的应变能力。基于PID参数系统的模糊自整定的控制原理框图如图2-3所示。
2.3 PID控制器
2.3.1 PID控制的发展
先成型的控制策略是使用PID来控制的策略,在上世纪20到40年代发展处通过PID控制相应的系统产生现金,从这之后,虽然有越来越多的性能更加优良的控制方法出现,但是因为PID控制器拥有简单的结构,可靠性非常高,鲁棒性好,系统便于调节对应的参数,在PID的控制规律中每一个环节是相互独立的,能够和实际的工业生产过程相对应,而且PID控制已经推广运用了很长的时间,相关控制研发人员已经获得了许多PID控制器相关参数的调节经验[9]。因为这些原因, PID控制器目前在工业日常生产中依然使用的非常广泛,在很多的工业生产中根据实际需要和PID易于调节的特性依然使用PID作为控制器。PID控制器经历了液压式,气动式,电动式的发展阶段,当前正在由模拟控制器向着更优良的数字智能控制器这个方向发展[10]。
2.3.2 PID控制理论
PID控制器属于线性控制器的一种,根据系统规定的值r(t)和当前系统的实际的输出值y(t),获得系统的控制偏差e(t)可以表示成:
(2-2)
偏差e(t)(Proportional)比例,积分(Integral)与微分(Derivative),基于控制量的线性组合,以控制被控对象,所以称为PID控制,如图2-4所示的PID控制系统的原理图

PID控制的系统可以从图2-5所表示的看出,该系统基本由控制器与相关的控制对象构成。PID控制系统作为线性控制系统的一种,它依据系统的设定值ysp(t)与系统实际获得的输出值y(t)来得出控制的偏差e(t),用线性组合将系统的偏差按比例,积分,微分之后组成控制量u(t),以控制被控对象,在控制器的输入和控制器的输出之间的关系可以描述为
u(t)=Kp[e(t)++Td (2-3)
式中:
e(t)=ysp(t)-y(t),Kp为比例系数,Ts为时间常数,Td为微分时间常数。
比例作用引入的比率的影响在时间比例来表示系统的偏差信号e(t),使控制在最短的时间内产生作用,使偏差向变小的方向变动。
对于系统的设定值会超调影响系统稳定的问题,HangC.C等人研究出了对于比例控制算法的进行了优化。方法是在比例控制里加入加权系数b的设定值,以此可以将PID控制器修正为
u(t)=Kp[ep(t)++Td (2-4)
其中:ep(t)=bysp(t)-y(t),通过改变设定值信号比例增益,减小相应的动态响应增益来克服超调的问题。
该校正环节的PID控制器的功能如下:
(1)比例环节是成正比的能够实时的检测控制系统当前的偏差信号e(t)的值,如果e(t)的值出现偏差,那么控制器会立马开始控制,用来减少偏差;
(2)积分环节的主要功能是去除系统的静态误差,使当前系统的误差度得到加强;
(3)微分环节的主要功能是表示系统当前的偏差信号的状态即信号的变化率,能够让系统在偏差信号失调严重之前,立即将一个有效的提前修正的信号加到当前系统中,这样可以加快系统对失调的反应速度,节省系统的调节时间。
2.4 PID参数的影响
PID各参数对系统的影响。
(1) 比例P调节
比例控制是一种控制方式非常简单并且控制非常基础的一种控制调节的方式,它的输出可以表示为。但如果系统只要比例控制在对系统进行控制时,系统是存在一定静差的。只要当控制的要求非常低时,在一般的情形下,不会只单单的通过比例控制来对系统进行控制和调整。比例系数是否最优关系到整个系统的反应的速度。当比例系数的放大倍数被调整在一个相对系统来说较大的数值使,那么当前系统会具有比较迅速的反应,但是相对应的整个系统的超调量会因为比例系数的放大倍数而变大。
(2) 积分I调节
积分控制是通过对整个系统的偏差信号在时间上进行积分的运算,如果当前系统运行监测所得到的值运算后得到的值与系统的设定值,两者之前存在一定的不同,那么系统就会不断的进行调整,直到两者之前的不同消除,偏差为零,通过这种方式消除系统的静差。所以,如果一个系统通过比例和积分来控制系统,能够实现整个系统在稳定的情况下,系统运行监测的值和给定值之间没有偏差。所以PI调节器可以算是人们非常喜欢使用的控制器。
(3) 微分D控制
微分的作用使对当前系统在接下来运行状态下,整个系统将要产生的变化进行一定的预测。在对整个系统进行相应的控制时,如果系统存在相对较大的惯性环节,也可能是比较大的滞后环节的时候,会对整个系统有抑制误差的作用,会严重的影响到当前系统的调节作用。所以需要将微分加入到系统的控制当中,通过对系统接下来的变化进行预测,可以将系统的调节功能进行一定程度上的优化的作用。
2.5 PID控制方法的优缺点
PID控制的优点:原理简单,易于使用;适应性强;鲁棒性强,不易受被控对象的变化干扰,非常适用于对系统干扰大的工业生产现场;对于许多工业系统来说更需要系统的稳定性,而对系统控制的快速性和精确度要求不高时,使用PID控制能获得较高的性价比;PID算法已经使用了相当长的一段时间,PID算法已经得到了很大的改进。
PI控制的不足:PID控制器的参数设置问题,一旦设置后计算,在整个的控制过程中是固定的,而在实践中,实际系统是运动的,它的参数是会不断变化的,所有系统无法达到最理想的控制效果。在如今的工业生产的控制中,有许多系统的运行工作机制非常繁杂,许多系统拥有复杂的多输入和多输出的强耦合特性,参数时变和严重的非线性特性,并可从系统对象的信息量获得的知识相对较少,伴随着工业生产对控制系统的性能要求越来越多。所以,在现在一般的PID控制系统很难在日常工业生产中达到很优良的效果。
3 MATLAB简介
3.1 MATLAB的概述
MATLAB是由美国的mathworks公司研发出的对工程应用的各个领域 进行系统的分析和设计的科学计算软件,该公司在2001年的时候推出了MATLAB的正式版本。伴随着软件版本的不断更新,涵盖的内容越来越多,功能也越来越强大[11]。近几年来,Mathworks公司在MATLAB语言使用在实时运行与系统仿真等方面,获得了很多的成绩,使它的运用前景更加广泛[12]。现如今在国际上美国之类的发达国家,在大学日常教学和科学研究中MATLAB软件应用的非常广泛。
MATLAB是建立在矩阵运算的基础上的交互式的程序语言,为了满足科学和工程计算以及对系统绘图的需求。在MATLAB中,系统涵盖的变量都用矩阵表示,每个矩阵中有n*m个数据,每一个数据都和矩阵都对复数的运算有效,直接将算法输入就可以得到输出结果,不需要编译。MTALAB具有非常完善的作图系统,可以根据系统获得的数据自动建立坐标系进行绘图。
MATLAB如今在大学里,尤其是电气信息类专业需要用来其来进行数值的运算,已经是各个学生的基本专业技能。MATLAB使这些专业的课程教学和研究的效率得到了很大的提升。
3.2 SIMULINK仿真工具简介
SIMULINK是MATLAB的仿真的一种,主要应用于对动态系统性能的分析和模型的建立还有仿真。SIMULINK对系统进行相应的仿真和分析,可以对当前的系统进行一定的实时修正或依据仿真得到的最理想的结果来对系统所对应的参数进行调试与确定,以此使系统的性能得到提升,节省在设计和完善系统的过程中花费的时间,实现实际系统的高效率开发。
因为SIMULINK可以直接使用在MATLAB中处理过的数据,操作者可以在SIMULINK下直接对数据进行分析、处理和调整等工作。通过SIMULINK优秀的评比手段,可以让工具箱拥有的设计与分析能力直接在仿真中运行。
3.3 SIMULINK仿真流程
1 模块的编辑
SIMULINK仿真的基础是模块,通过对模块进行编辑,可以清晰的看到模型的参数,提高模型的可读性。
2 模块的参数设置
通过对仿真中模块的参数进行设置,对系统进行调整,由此对仿真结果进行调整。
3 模块的属性设置
通过对属性的修改,对系统进行分析。
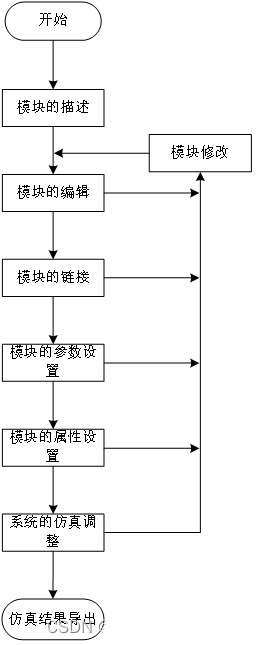
图3-1 仿真流程图
4 电热炉温度的模糊PID智能控制算法与仿真实验
4.1 模糊PID温度智能控制器设计
- 模糊化处理
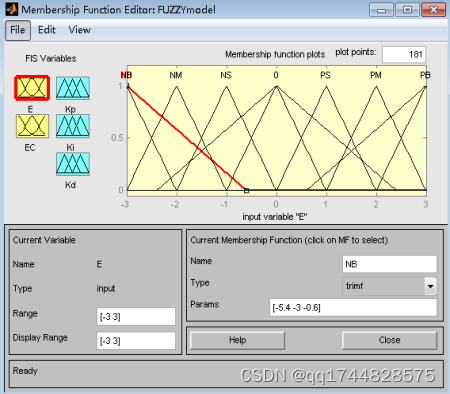
把系统在一定区间内的误差e与误差变化率ec用模糊集的论域来定义:E,Ec为[-3,3],将PID参数的调节量作为模糊控制器的二输入和三输出,依照在该系统中的调节规律,控制规则,总结出适应于该系统的参数调节的规则。
三个输出的论域都为[-3,3],语言变量选择七个语言值,{NB,NM,NS,ZO,PS,PM,PB}。集合中的元素依次表述的是负大、负中、负小、零、正小、正中、正大。令Ec的函数是三角形的隶属函数,建立如图4-1的的规则表。
该系统的模糊控制选用的控制规则是:if A and B then C。
2) 建立对应的模糊规则
Fuzzy-PID是建立在PID的算法基础之上,通过计算当前运行系统的误差E和误差的变化率EC,使用模糊规则来进行模糊推理,接着查询模糊矩阵表对参数进行调整。建立模糊控制规则表如表4-1,表4-2,表4-3。
PB PM PS ZO NS NM NB
PB NB NB NM NM NM ZO ZO
PM NB NM NM NM PS ZO PS
PS NM NM NS NS ZO PS PS
ZO NM NM NS ZO PS PM PM
NX NS NS ZO PS PM PM PM
NM ZO ZO PS PS PM PB PB
NB ZO ZO PS PM PM PB PB
E PB PM PS ZO NS NM NB
PB PB PB PM PM PS ZO ZO
PM PB PB PM PS PS ZO ZO
PS PB PM PS PS ZO NS NM
ZO PM PM PS ZO NS NS NM
NS PS PS ZO NS NS NM NB
NM ZO ZO NS NS NM NB NB
NB ZO ZO NS NM NM NB NB
E PB PM PS ZO NS NM NB
PB PB PS PS PM PM PM PB
PM PB PS PS PS PS ZO PB
PS ZO NO ZO ZO ZO ZO ZO
ZO ZO NS NS NS NS NS ZO
NS ZO NS NS NM NM NS ZO
NM ZO NS NM NM NB NS PS
NM PS NM NB NB NB NS PS
3)确定参数
,经过去模糊化的处理后,,最终通过以下公式得到:
(4-1)
(4-2)
(4-3)
4.2 模糊PID控制算法仿真实验研究
1)建立模糊控制器
通过在MATLAB的窗口里输入Fuzzy命令来打开模糊逻辑的编辑窗口,选中[Edit]下的[Add Input]和[Add Output]选项。确认模糊控制器的结构是三输出、两输入(e、ec),并确认输入和输出的名称,如图4-2所示。

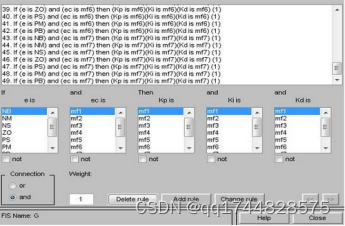
2)编辑模糊规则表
在窗口里选中工具栏里的[view]再选中其下拉菜单中的[Edit rides],将模糊规则的编辑页面点出,建立基于“If…and…Then…and…”模式的模糊控制的规则,如图4-3所示,每一条规则的加权值的缺省值都是1,在If and then的窗口框内选择相对应的量,接着选中viw菜单栏中的Edit rules,依据设计的系统的模糊控制规则表把相应的运行规则加入其中。
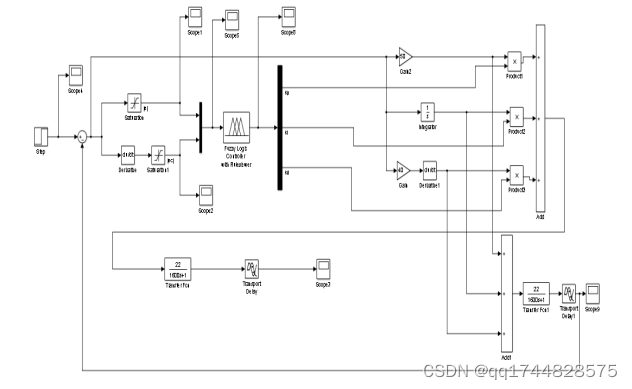
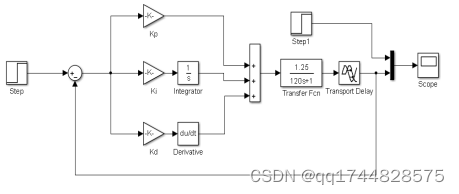
3) 建立关于模糊PID系统的仿真图,如图4-4。
在本文中选用的仿真对象传递函数是
(4-4)
式中,K是控制对象静态增益;T是控制对象时间常数;为控制对象的纯滞后时间。
依据飞升曲线测量的方法与经验,可以得出该电热炉的T=120,=122,K=1.25。
由此可以得出电热炉的温度系统传递函数是
(4-5)
设定温度为60℃,得到的电热炉的温度模糊PID控制系统阶跃仿真的结果如图4-5所示。
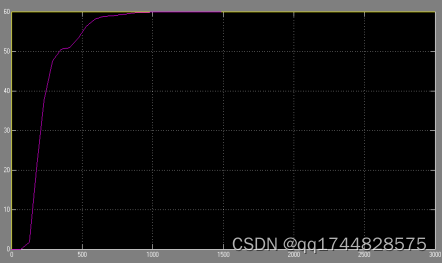
图4-5 模糊PID控制系统仿真波形图
调节时间tss=1000s,超调量,稳态误差ess=2。
4.3 PID温度控制与模糊PID温度控制的仿真比较
1)常规PID温度控制器,如图4-6所示。
实验中,通过临界比例度法,对系统的进行调试根据表4-4临界比例度整定控制器参数经验公示表求出系统的三个参数为
表4-4 临界比例度整定控制器参数经验公示
控制器
类型 控制器参数
min
P % —— ——
PI % ——
PID %
当规定的温度是60℃时,系统的仿真相应曲线图如图4-7所示。
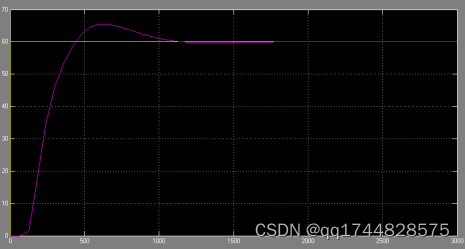
图4-7 PID控制系统仿真波形
3)仿真结果分析
通过对常规PID与模糊PID进行系统的控制两种方案的仿真对比,可以得出以下结论:
当电热炉的温度控制系统使用的是纯PID控制时,系统的超调量比较大,容易产生震荡;当电热炉的温度控制系统采用的是模糊PID进行控制时,由图中的仿真曲线可以总结出,模糊PID控制解决普通的模糊控制问题,增强了系统稳定性,并且使系统的调节时间达到了系统的调节要求,实现系统震荡小,稳态误差小,震荡小的理想系统性能要求。
因此,系统采用的是模糊PID来控制电热炉的温度,不但使电热炉效率得到提高,还减少电热炉对能源的消耗,资源利用率高,污染减少,达到节能,经济和环保的指标,具有很强的社会应用价值。
5 模糊PID系统的温度控制的硬件设计
5.1 系统硬件电路的构成
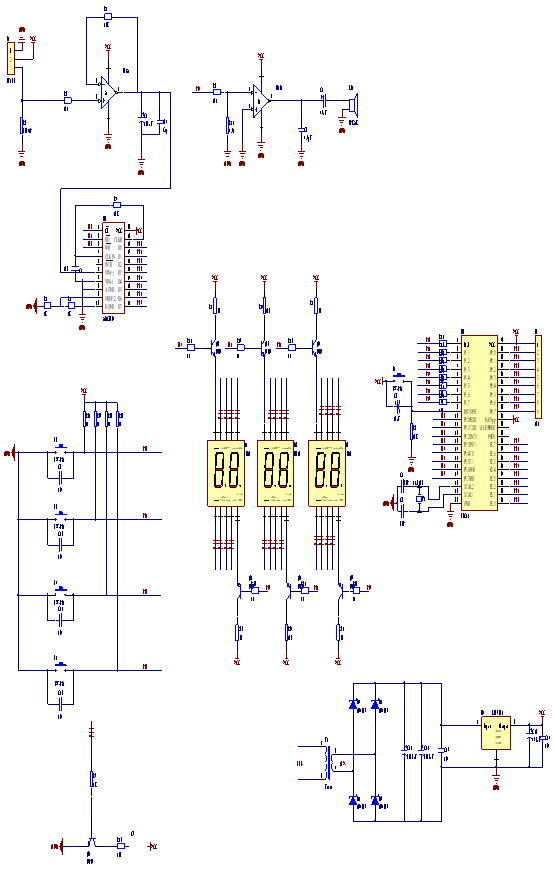
系统的硬件电路由采样电路,声光报警电路,按键与显示电路,ATC51硬件电路等构成。总图见附录。
5.1.1 采样电路
在该系统控制中,需要对温度,压力,重量,流量等物理量进行检测,并将测得的模拟量转换为离散的数字量,之后输入给单片机对数据进行处理,实行控制。
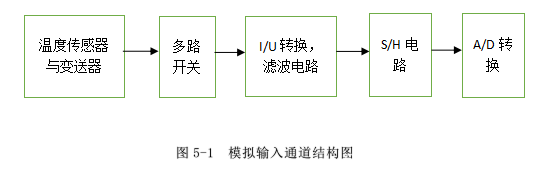
如图5-1所示,模拟输入通道通过温度传感器和变送器,放大滤波电路,采样保持电路,A/D转换组成。此采样通道分四路检测电热炉四个不同部位的温度,转变为数字量之后导入单片机。
调理电路的设计
I/U转换器对在电流和电压信号之间进行转换。对电流测量时,需要把电流转变成电压,接着用数字电压表测量。在电热炉温度控制系统中,由于电热炉所处环境较为恶劣,常常存在电场,磁场等干扰源,使温度采样值偏离实际温度值。因此,在本电路中选用电解电容和非极性电容对高频,低频干扰进行抑制。
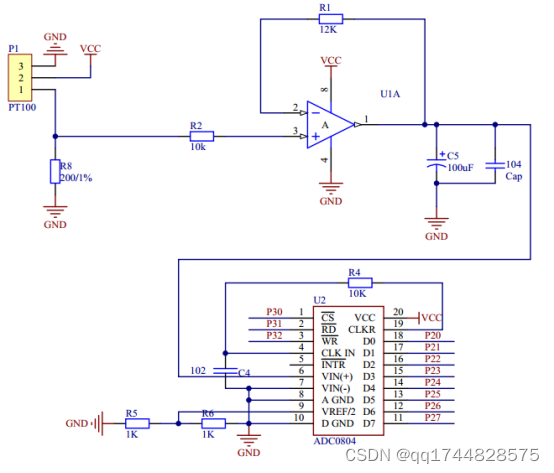
图5-2 电流-电压转换与滤波电路
5.1.2 声光报警电路
如图5-3,5-4所示,本文用声,光报警系统。

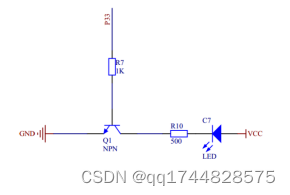
图5-4 光报警电路
5.1.3 按键与显示电路设计

图5.4按键电路
按键功能说明如下:S2为预约时间及预设温度设置选择键,在系统正常工作时,按下该键对系统的预约时间进行设置,相对应的LED数码管会通过闪烁来表述预约时间的变化,再一次按下S2,系统会进入对预设温度进行设置,对应温度的数码管会通过闪烁来表示状态的提升,设置完毕后按下S2键,系统回归到正常状态。在预约时间的状态下按下一次S4键,相对的预约时间是365分钟,这个模式是永久加热的模式,一定要手动来控制电热炉开关机,再按下S4一次时,预约的时间会清零,温度的设置和这个基本相同,不同的地方是预设温度是240度时按下S4预设温度会清零。S3键与S4不同地方是它只对预设温度设置有效,在预设的温度设置状态下按下此按键对应值加0.1,S5与S3类似,只是按下S5时对应的设置值加10这一个区别。
另外,每路按键开关接入单片机接口前都需要通过滤波防抖的电路,由图中可以看到,通过RC的积分电路对相应的干扰脉冲进行消除,只需将时间常数调整到合适的值,就能够让按键的抖动信号在经过滤波电路的时候,去掉抖动的不良影响。
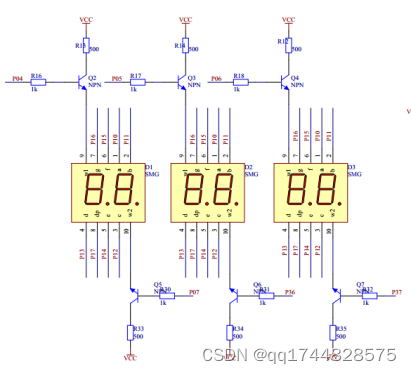
图5-5 显示电路
5.1.4 A/D转换模块
A/D转换器在整个控制系统之中是使用非常多的一种芯片,对于不同的系统来说,它们需要不同精度的转换来匹配系统的运行。对于不同的精度的转换芯片来说,因为要求不同,各个芯片的工作原理也是不一样的。在一般的情形下,我们可以把A/D转换器分为两大类,分别是直接转换和间接转换。直接转换又可以把它分为两类,分别是并行转换和反馈比较型转换。
在系统中我们使用的是ADC0804芯片。因为其廉价比比较高,具有8位的分辨率,芯片的各个功能都与整个系统相匹配。此外,ADC0804的使用非常简单便捷,管脚配置如图5-6所示。
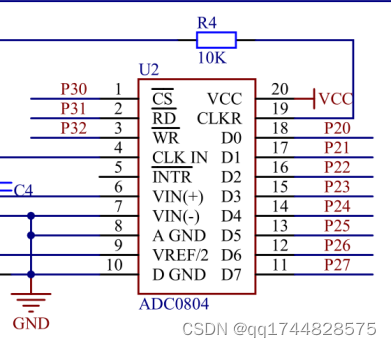
图5.6 ADC0804电路图
ADC0804各引脚名称及作用:
DB0~DB7 具有三态特性数字信号输出口;
AGND 模拟信号地;
DGND 数字信号地;
CLK 时钟信号输入端;
WR 写信号输入端,低电平有效;
RD 读信号输入端,低电平有效;
VREF/2 参考电平输入端,决定量化单位。
5.2 单片机系统电路
本系统使用89C52单片机作为整个系统的控制芯片,用单片机的最小化系统的电路就可以达到各种控制的目的。
最小化的单片机系统的功能电路如图所示:
(1)单片机的引脚图和逻辑图见下图5-7。

图5-7 51单片机的引脚图
本设计的系统的复位是通过在设计的系统电路中加入复位开关来实现。电路如图5.8所示:

总结
本次的毕业设计是根据如今国内模糊控制在国内的发展状况,通过MATLAB中的SIMULINK完成对模糊PID炉温控制系统的仿真。借助MATLAB,对常规的PID控制和模糊PID控制进行仿真的对比和分析。从仿真的结果不难得出使用模糊PID控制系统对加热炉进行控制有很好的稳定性,系统的震荡小,稳态误差小的优点。
当前国内在工业生产中,基本采用人工或者常规PID控制对加热炉进行控制,存在造资源利用率低,缩短机器寿命,利润低等缺点。因此要采用模糊PID来对加热炉进行控制,不但使电热炉效率得到提高,还减少电热炉对能源的消耗,资源利用率高,污染减少,达到节能,经济和环保的指标,具有很强的社会应用价值。
附录 系统硬件电路总图
致 谢
四年的读书生活在接下来的一小段时间内就将划上一个句号,虽然这只是我人生中的一小段,但却是我人生的又一个转折点。从这里我将真正的步入社会,结束自己的学生生涯。在大学生活的这四年里,我从各位老师,同学和朋友这学到了很多。
在这里我要感谢我的导师对我大学最后的学习任务—毕业设计的知道,在这期间,他花费了大量的时间和心血,从最开始的选题到开题报告,从论文的写作提高到帮我一遍又一遍的之处论文之中的具体问题,他严谨的治学态度还有在各种无私奉献的敬业精神令人敬佩,在这里我向甘良志老师表示最衷心的感谢。
感谢我的父母,是他们在这二十多年里,用他们辛勤的劳动,才让我有了一个舒适的成长环境,是你们的理解和支持让我可以在学校专心的完成自己的学业,没有你们就没有今天的我!
最后,我要感谢我身边的朋友和同学,尤其是11电51的各位同学们,是你们对我的关心和帮助让我不断前进,因我你们我的大学生活才如此的多姿多彩,谢谢你们!
因为自身专业水平有限和时间的仓促,我的论文还存在尚未发现的缺点和错误。希望阅读论文的老师,同学,多多给予指正,非常感谢!
[参考文献]
[1] 覃强. 模糊PID温度控制方案的仿真优选及其实现[D] :(硕士学位论文).北京:中国科学院电工研究所,2002.
[2] 于海生. 微型计算机控制技术[M].北京:清华大学出版社,1998.
[3] 冯勇. 现代计算机控制系统[M].哈尔滨: 哈尔滨工业大学出版社,1997.
[4] 鄢景华. 自动控制原理[M]. 哈尔滨: 哈尔滨工业大学出版社,1996.
[5] 吴为民,王仁丽. 温度控制系统的发展概况[J]. 工业炉,2002,24(20) :18-20.
[6] 杨涛,高伟,黄树红. 基于Matlab的锅炉过热汽温模糊控制系统仿真[J].华中科技大学学报,2003,31(4):63-65.
[7] 胡泽新,周金荣,黄道. 多变量非线性自整定PID控制器[J].控制理论与应用,1996,4: 268-272.
[8] 邵红,李川香.一种基于Fuzzy-PID的温度控制系统[J]. 自动化仪表,2002, 23(9): 70-72.
[9] 旺光阳.基于模糊工具箱和SIMULINK的模糊控制系统计算机仿真[J]. 安徽工业大学学报,2001,8:56-57.
[10] 李士勇. 模糊控制神经控制和智能控制论[M] .哈尔滨:哈尔滨工业大学出版社,1996.
[11] 李芳,白晓虎,纪建伟. 基于模糊控制的温室控制系统的研究[J].农机化研究,2007(1):83-84.
[12] 韩峻峰,李玉惠. 模糊控制技术[M]. 重庆:重庆大学出版社,2003.