Livox激光雷达 mid360 跑 fastlio2 - 流程记录
mid360 跑 fastlio2
- 一、配置 mid360 环境
- 1.1、主机配置静态IP为192.168.1.50
- 1.2、Livox-SDK2
- 1.3、Livox_ros_driver2
- 二、Fast-lio2
- 2.1、下载源码
- 2.2、修改代码
- 2.3、编译、运行
提示一下,如果在一些板上(比如rk3399,或者是树莓派 ,nano之类的)一直编译不了 ros程序,很多时候是因为 swap 不足,这个时候扩展一下 swap 就好了 扩展 swap 参考链接
一、配置 mid360 环境
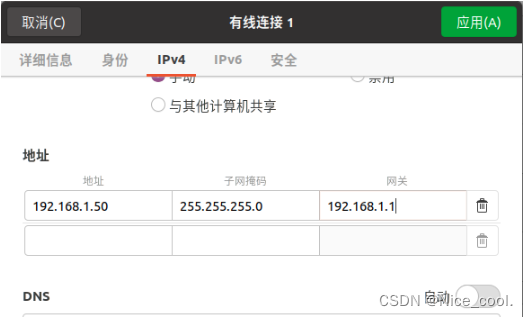
1.1、主机配置静态IP为192.168.1.50
1.2、Livox-SDK2
安装工具
sudo apt install cmake
下载源码编译
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd Livox-SDK2
cd build && cmake ..
make
sudo make install
查看是否安装成功,需要修改Livox-SDK2/samples/livox_lidar_quick_start/mid360_config.json中:"host_ip" : "192.168.1.50",
打开终端
cd Livox-SDK2/build/samples/livox_lidar_quick_start
./livox_lidar_quick_start ../../../samples/livox_lidar_quick_start/mid360_config.json
1.3、Livox_ros_driver2
下载源码编译
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2
cd ws_livox/src/livox_ros_driver2
# For ros1
./build.sh ROS1
# For ros2
./build.sh ROS2
cd ws_livox
source install/setup.sh
进入 ws_livox/src/livox_ros_driver2/config目录下,找到 MID360_config.json 修改 lidar ip
比如我的ip是 "ip" : "192.168.66.188",其中88是我的 SN 码后两位

二、Fast-lio2
2.1、下载源码
创建工作空间 fast_lio2_ws ,把 fast-lio2源码放在 工作空间的 src 下
下载 fast-lio2 源码
cd ~/$A_ROS_DIR$/src
git clone https://github.com/hku-mars/FAST_LIO.git
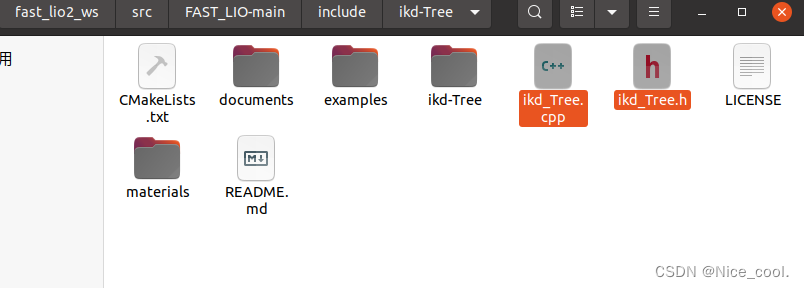
下载 ikdtree 源码 在 xx/FAST_LIO-main/include/ikd-Tree/下
git clone git@github.com:hku-mars/ikd-Tree.git
2.2、修改代码
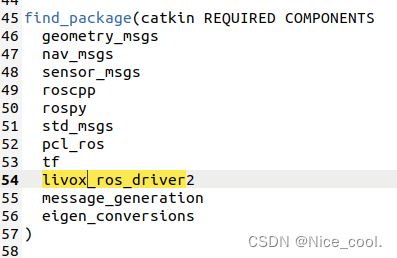
主要是把 livox_ros_driver 改成 livox_ros_driver2
1、fast_lio2_ws/src/FAST_LIO-main 下的 CMakeLists.txt
2、laserMapping.cpp
3、preprocess.cpp、preprocess.h
2.3、编译、运行
catkin_make
source devel/setup.bash
roslaunch fast_lio mapping_avia.launch
roslaunch livox_ros_driver2 msg_MID360.launch