【机器人工具箱Robotics Toolbox开发笔记(七)】 创建机器人连杆对象
在机器人工具箱中,用变量表示机器人的关节类型。其中表示转动关节,表示移动关节(若未指定该参数,默认为转动关节)。在工具箱中,用函数Link()可以创建一个机器人对象,其中输入的参数顺序分别是关节角、连杆偏距、连杆长度、连杆扭角、关节类型。
例如,创建一个关节角初始、连杆偏距、连杆长度、连杆扭角给定、关节类型为转动关节的连杆,参数如下:
输入MATLAB命令代码:
L=Link([0,2,3,pi/4,0])运行结果:

其中,offset表示关节的偏移量;R表示为旋转关节;stdDH表示用标准型D-H参数法去描述。用以下命令可以获取连杆的各个参数:
1)L.RP:获取连杆的关节类型;
2)L.theta:获取连杆的关节角;
3)L.d:获取连杆的偏距;
4)L.a:获取连杆的长度;
5)L.alpha:获取连杆的转角。
【具体实例】
根据以上指令,可以创建一个具有n自由度的机器人。以平面三连杆机器人为例,该机器人由三个转动关节组成,也称为RRR(或3R)机构。
三连杆平面机器人的D-H参数如表1所示。
表1 RRR机构的D-H参数表

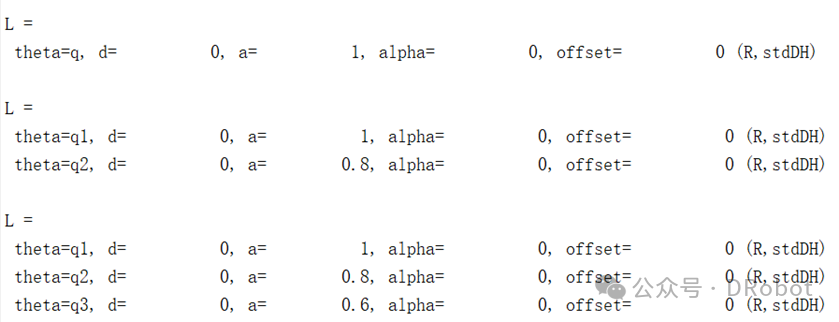
创建连杆对象可以输入MATLAB命令:
L(1)=Link([0,0,1,0])L(2)=Link([0,0,0.8,0])L(3)=Link([0.0.0.6,0])
运行结果:
通过构造函数SerialLink()可以给创建的机器人对象命名,并显示出对象的信息。
输入MATLAB命令:
three_link=SerialLink(L,'name','threelink')运行结果:

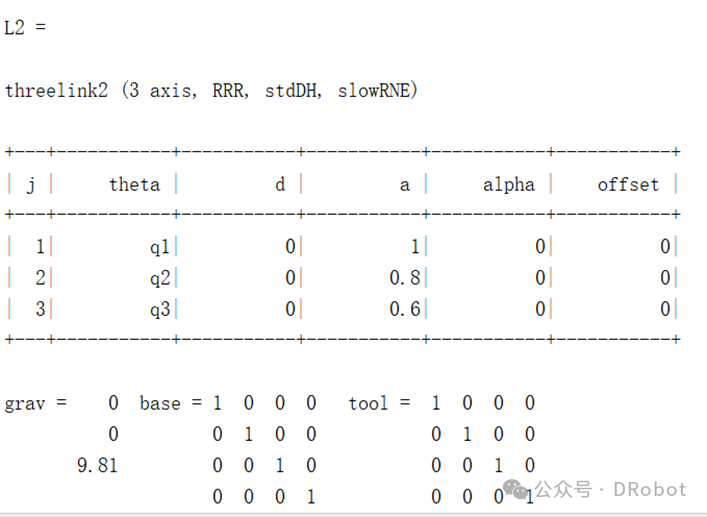
这里的std表示该机器人根据标准型D-H参数进行定义,重力加速度默认作用在Z轴上,为,基坐标型和工具坐标系保存初始的位姿。
用表2中所列指令可以获取已创建机器人的各个参数。
表2 获取已创建机器人参数的指令
| 参 数 | 指 令 | 参 数 | 指 令 |
| 关节数目 | three_link.n | 关节角 | three_link.theta |
| DH参数 | three_link.links | 连杆偏距 | three_link.d |
| 关节类型 | three_link.config | 连杆长度 | three_link.a |
| 连杆扭角 | three_link.alpha |
也可以对所创建的机器人对象进行复制,例如,复制一个名为“three_link2”的机器人的命令为:
L2=SerialLink(three_link,'name’,'threelink2')运行结果为:
本节主要如何使用机器人工具箱Robotics Toolbox创建机器人连杆对象,主要的函数有函数Link()等。