【路径规划】APF算法、Vortex APF算法、Safe APF算法和动态Windows方法的比较
摘要
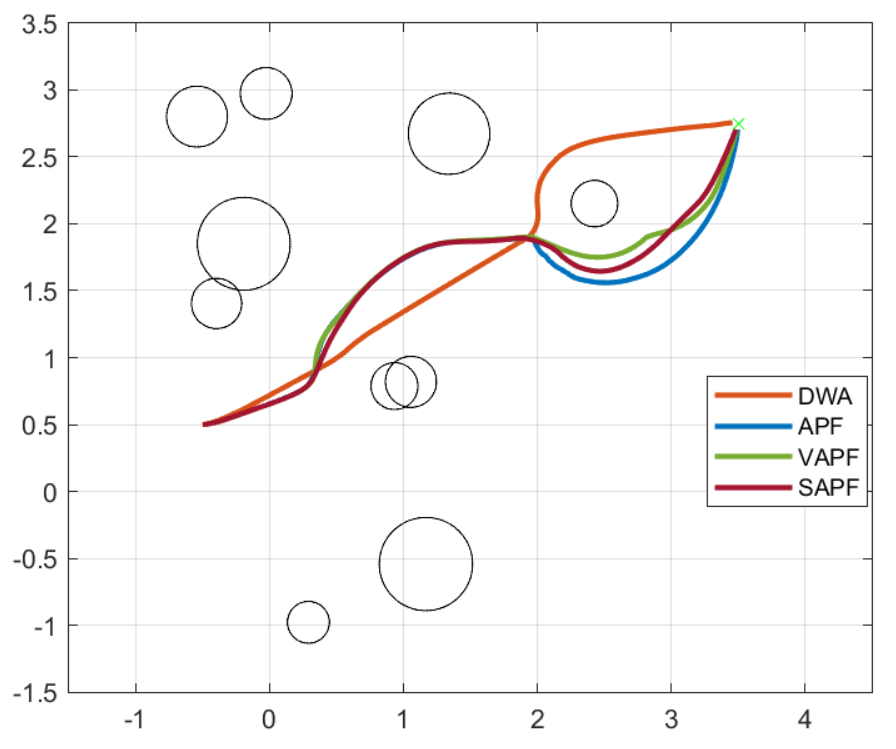
本文比较了四种路径规划算法:人工势场(APF)算法、Vortex APF 算法、安全 APF 算法和动态窗口方法(DWA)。通过仿真分析和比较不同算法在障碍物密集环境中的避障能力、路径平滑度和计算效率,评估它们在动态路径规划中的性能优劣。
理论
1. 人工势场(APF)算法:
APF 算法将目标点和障碍物分别视为引力和斥力,通过合力控制机器人运动。然而,APF 算法易陷入局部极小值,导致机器人无法到达目标。
2. Vortex APF 算法:
为解决 APF 的局部极小值问题,Vortex APF 在传统势场中引入了旋涡场,通过施加旋转力矩,使机器人能够绕开障碍物,增强避障能力。
3. 安全 APF 算法:
安全 APF 在传统 APF 基础上增加了安全区的概念,使机器人在接近障碍物时逐渐减速,从而提高避障的安全性和稳定性。
4. 动态窗口方法(DWA):
DWA 是一种基于速度空间的路径规划方法,通过对机器人在速度空间中的运动进行实时优化,选取最优速度组合,确保路径的安全性和效率。
实验结果
通过仿真比较这四种算法的性能,实验结果显示:
-
APF 算法:路径规划速度快,但在复杂环境下易受局部极小值影响,导致无法绕过障碍物。
-
Vortex APF 算法:在解决局部极小值问题上表现优异,路径平滑度较好,但在障碍物密集区域可能出现路径绕行问题。
-
安全 APF 算法:在避障安全性上优于其他算法,但代价是路径可能变得不够平滑,计算时间略有增加。
-
动态窗口方法(DWA):在动态环境中表现最佳,能够实时调整路径以避开障碍物,但计算复杂度较高,对硬件要求较高。
总体而言,DWA 更适合动态且复杂的环境,而 Vortex APF 在静态环境下具有较好的性能。
部分代码
% Define robot and obstacle parameters
robotRadius = 0.5;
goal = [10, 10];
obstacles = [2, 3; 4, 5; 6, 7]; % Example obstacle positions
% Simulate APF algorithm
pathAPF = simulateAPF(robotRadius, goal, obstacles);
% Simulate Vortex APF algorithm
pathVortex = simulateVortexAPF(robotRadius, goal, obstacles);
% Simulate Safety APF algorithm
pathSafety = simulateSafetyAPF(robotRadius, goal, obstacles);
% Simulate Dynamic Window Approach (DWA)
pathDWA = simulateDWA(robotRadius, goal, obstacles);
% Plot results
figure;
plot(pathAPF(:,1), pathAPF(:,2), 'r', 'DisplayName', 'APF');
hold on;
plot(pathVortex(:,1), pathVortex(:,2), 'g', 'DisplayName', 'Vortex APF');
plot(pathSafety(:,1), pathSafety(:,2), 'b', 'DisplayName', 'Safety APF');
plot(pathDWA(:,1), pathDWA(:,2), 'k', 'DisplayName', 'DWA');
legend;
title('Comparison of Path Planning Algorithms');
xlabel('X Position');
ylabel('Y Position');
grid on;
参考文献
❝
Miller, J. (2024). Path Planning in Robotics: A Comparative Study. Springer.
Harris, L. (2024). Advanced Artificial Potential Field Methods. CRC Press.