【智路】智路OS Airos Edge 2.0 Quick Start
Airos Edge 2.0 Quick Start
1 智路OS2.0
1.1 简介
智路OS路侧操作系统airos-edge自下而上分别由内核层,硬件抽象层、框架层、服务层和应用层构成;提供了一系列抽象和框架,支持设备接入、服务、应用等组件开发,兼容X86和ARM操作系统,技术架构如下所示:
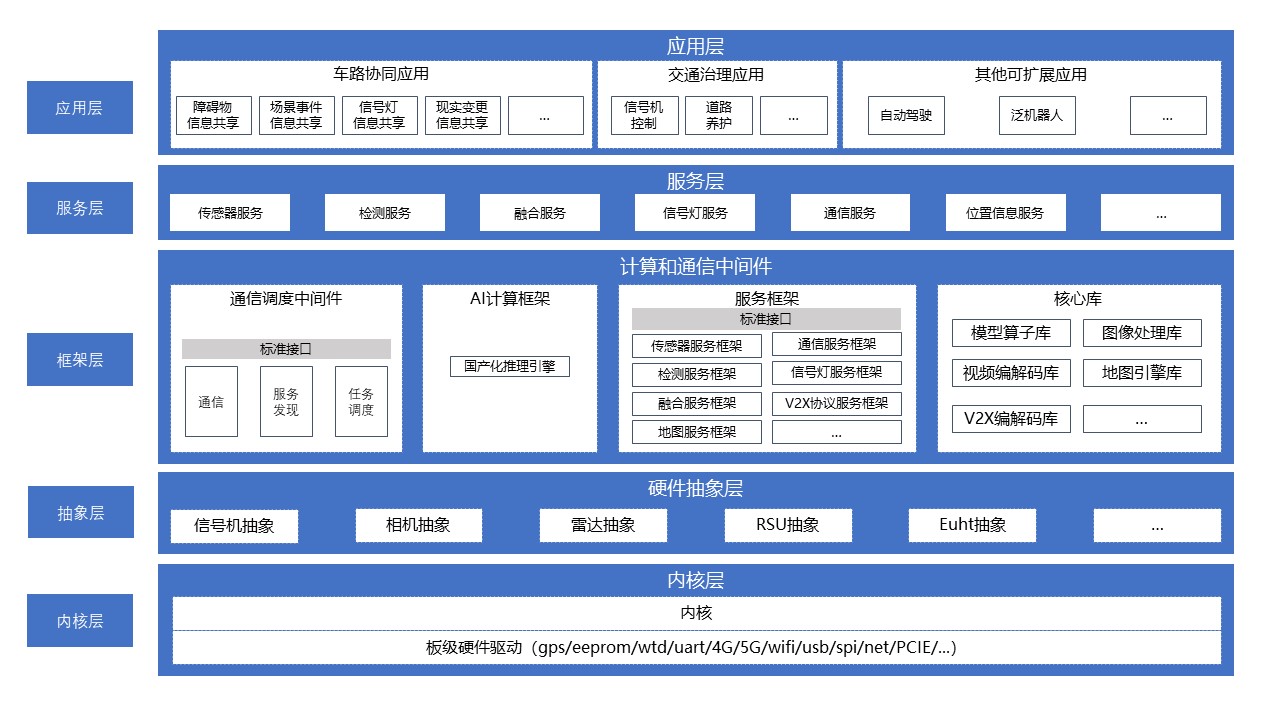
内核层
智路OS内核层融合了进程和线程管理、内存管理、文件系统、网络栈、设备驱动、实时补丁、高可用支持以及POSIX(Portable Operating System Interface for UNIX)兼容性等关键要素,以满足面向车路协同场景的高实时性、发并性、可靠性的需求。
抽象层
为实现硬件与操作系统之间的交互,智路OS制定了硬件接入和输出的标准,硬件设备接入应符合以下要求:
- 设备接入:智路OS明确了硬件设备的接入方法,涵盖了设备接口定义
- 设备输出:智路OS规定了设备输出的数据结构和内容标准,包括设备状态、处理结果等
框架层 - 通信和调度中间件:规定了通信中间件的标准接口。通信和调度中间件默认实现包含通信、服务发现、计算调度等核心模块,其中通信使用pub/sub的匿名通信模式,基于动态的服务发现去除了中心化的节点,支持进程间和跨机器通信,计算调度模块屏蔽了操作系统的底层细节。
- 服务框架:服务框架定义了组件的接口及输出,提供了服务、设备组件、应用的加载,包含了智路OS核心服务架构
服务层
服务层定义了智路 OS 系统应该具备以下几项服务能力,包括传感器服务、检测服务、融合服务、信号灯服务、通信服务等。当服务组件被框架层加载并运行时,就组成了智路OS的基本服务。
应用层
应用程序可以根据其特定业务需求,充分利用智路 OS 提供的多样化服务,其中包括传感器服务、感知服务、通信服务以及信号灯服务等提供的标准数据。通过接口订阅,获取实时的服务数据,经过逻辑处理后发送至输出设备或与云服务器进行交互,从而完成应用的构建。
1.2 框架与组件
核心目录架构
├── air_service
│ ├── framework
│ └── modules
├── app
│ ├── framework
│ └── modules
├── device_service
│ ├── framework
│ └── modules
└── base
框架(Framework) 属于智路OS框架层,负责加载及运行组件,规定了各类组件的接口及输入输出
组件(Module) 是智路OS规定可由开发者自定义的模块,以包的形式管理、开发、部署。开源版本提供了所有标准的组件示例,可直接运行、参考开发。
| 组件类型 | 描述 | 举例 |
|---|---|---|
| 设备接入 | 为系统提供数据接入能力 | 信号机、RSU、Camera、Lidar |
| 服务 | 基于接入数据为应用提供服务的组件 | 视觉感知服务、雷达感知服务、融合服务 |
| 应用 | 基于系统数据,实现事件检测、信控、V2X应用场景、规划控制等应用 | 车路协同、规划控制 |
2 智路OS运行
智路OS开源代码包括智路OS框架和所有标准的组件示例,可直接运行。
获取docker镜像并启动docker容器
# 请在源代码根目录执行
bash docker/scripts/docker_start.sh
进入docker容器
# 请在源代码根目录执行
bash docker/scripts/docker_into.sh
进入docker容器内部后,所在的工作目录其实是通过docker的"卷映射"将源代码根目录映射到当前所在的目录。
编译产出
# 在docker内工程目录下执行
bash build_airos.sh release
产出位于/home/airos/os目录
运行
# 1. 产出(如果已经执行,则可跳过)
bash build_airos.sh release
# 2. 配置环境(如果已经执行,则可跳过)
source /home/airos/os/setup.bash
# 3. 查看可运行的pipeline
airos_launch -h
# 4. 运行信号灯pipeline
airos_launch traffic_light
清理编译
# 在docker内工程目录下执行
bash build_airos.sh clean
调试
通信层调试工具
往往一个pipeline会包含多个子模块,各个子模块之间通过中间件完成相互之间的通信。
当前智路OS默认使用CyberRT作为通信中间件,CyberRT提供了多种调试工具,可以方便的查看通信数据:
- cyber_channel
- cyber_launch
- cyber_monitor
- cyber_recorder
上述命令行工具运行时加入"-h"参数,可以显示详细的使用说明,可以参考。
工具使用方式示例:
# 1. 产出(如果已经执行,则可跳过)
bash build_airos.sh release
# 2. 配置环境(如果已经执行,则可跳过)
source setup.bash
# 3. 运行全量通道监控工具
cyber_monitor -a
3 组件开发
智路OS支持组件的开发,并且提供了集成开发环境、智路SDK、包管理工具简化开发流程
集成开发环境
环境准备
基础环境:
- x86_64
- 系统:Linux及发行版,内核5.4.0及以上版本,建议Ubuntu 18.04及以上版本
- 内存:8G
- Docker:建议v20.10.0及以上版本
- aarch64(Nvidia Jetson AGX orin)
- 系统:Jetson 5.0.2
- 内存:32GB
- Docker:建议v20.10.0及以上版本
运行环境:
如需运行智路OS框架及示例算法,需要安装
- x86_64
- NVIDIA驱动:455.32.00及以上版本
- CUDA:11.1及以上版本
- NVIDIA容器工具:nvidia-docker2
- aarch64(Nvidia Jetson AGX orin)
- NVIDIA驱动:jetson自带的驱动
- CUDA:11.4
- NVIDIA容器工具:nvidia-docker2
示例算法运行环境
- X86_64版本算法模型目前支持在Tesla T4和 Quadro RTX4000上运行
- aarch64版本算法模型目前支持在NVIDIA Jetson AGX Orin上运行
获取SDK及集成开发环境
# 请在源代码根目录执行
bash docker/scripts/docker_start.sh sdk # 拉取智路OS集成开发环境镜像
bash docker/scripts/docker_into.sh sdk # 进入智路OS集成开发环境镜像
进入集成开发环境后,可以使用包管理工具airospkg进行组件的开发。具体流程参考 智路OS路侧操作系统开发手册