【笔记】自动驾驶预测与决策规划_Part3_路径与轨迹规划
文章目录
- 0. 前言
- 1. 基于搜索的路径规划
- 1.1 A* 算法
- 1.2 Hybrid A* 算法
- 2. 基于采样的路径规划
- 2.1 Frenét Frame方法
- 2.2 Cartesian →Frenét 1D ( x , y ) (x, y) (x,y) —> ( s , l ) (s, l) (s,l)
- 2.3 Cartesian →Frenét 3D
- 2.4 贝尔曼Bellman最优性原理
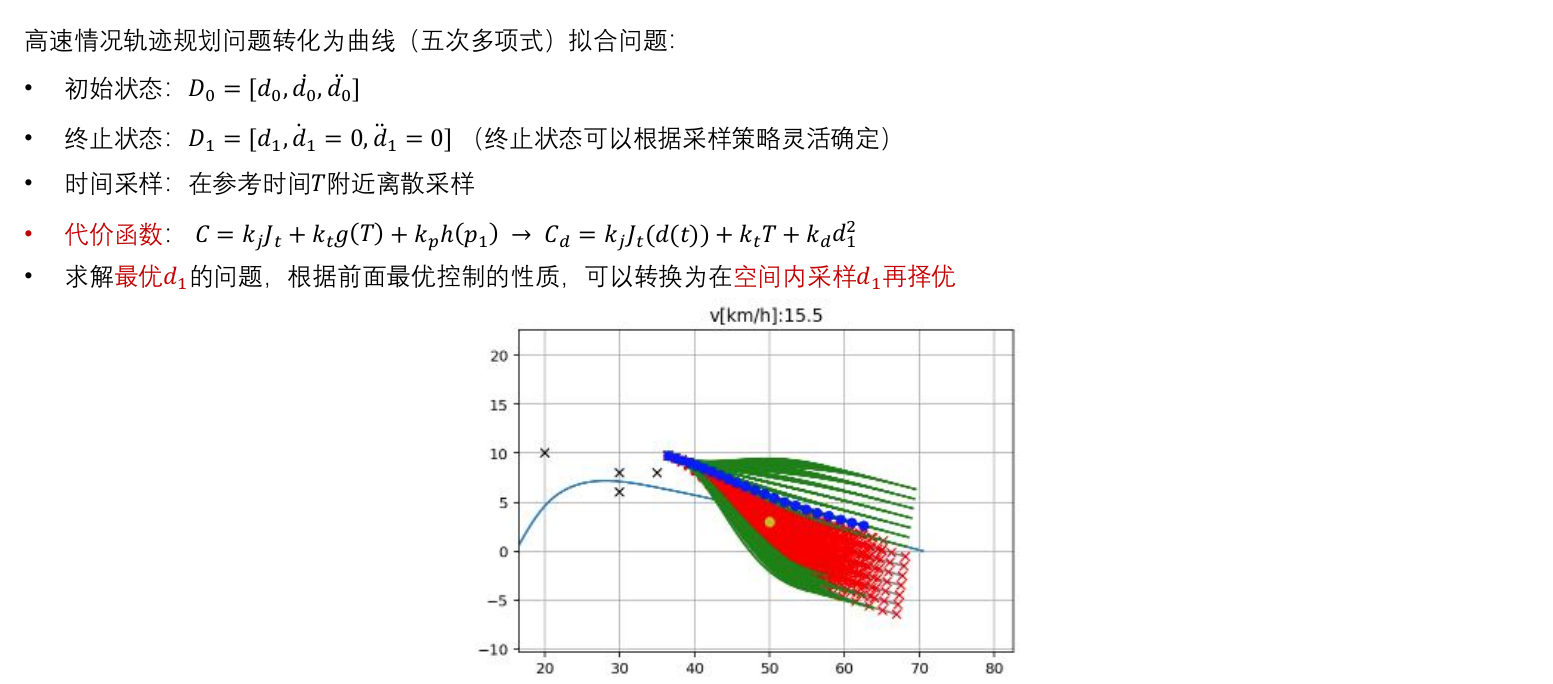
- 2.5 高速轨迹采样——横向
- 2.6 高速轨迹采样——纵向
- 2.7 低速轨迹规划——横向
- 2.8 总结
- 3. 基于优化的路径规划
- 3.1 以百度Apollo EM planner为例
- 3.2 M-Step DP Path
- 3.3 M-Step DP Speed Optimizerp
0. 前言
本文主要记录课程《自动驾驶预测与决策技术》的学习过程,难免会有很多纰漏,感谢指正。
课程链接:https://www.shenlanxueyuan.com/my/course/700
-
基于搜索的路径规划
-
基于采样的路径规划
-
基于优化的路径规划
1. 基于搜索的路径规划
1.1 A* 算法
A*算法是一种用于路径规划和搜索的启发式算法,基于图搜索的思想,结合了深度优先搜索(DFS)和广度优先搜索(BFS)的优点,可以找到从起点到终点的最优路径。
基本原理
A*算法通过维护一个优先队列来存储当前待探索的节点,每次从中选择一个估计总代价最小的节点进行扩展。每个节点的总代价由两个部分组成:
g(n): 从起点到当前节点n的实际代价。这是路径上已经发生的开销,也就是从起点出发,经过一系列已探索的节点,到达当前节点n所花费的总代价。g(n)通常根据具体问题中的距离、时间、能量消耗等进行计算。h(n): 从节点n到终点的估计代价(通常使用启发式函数计算)
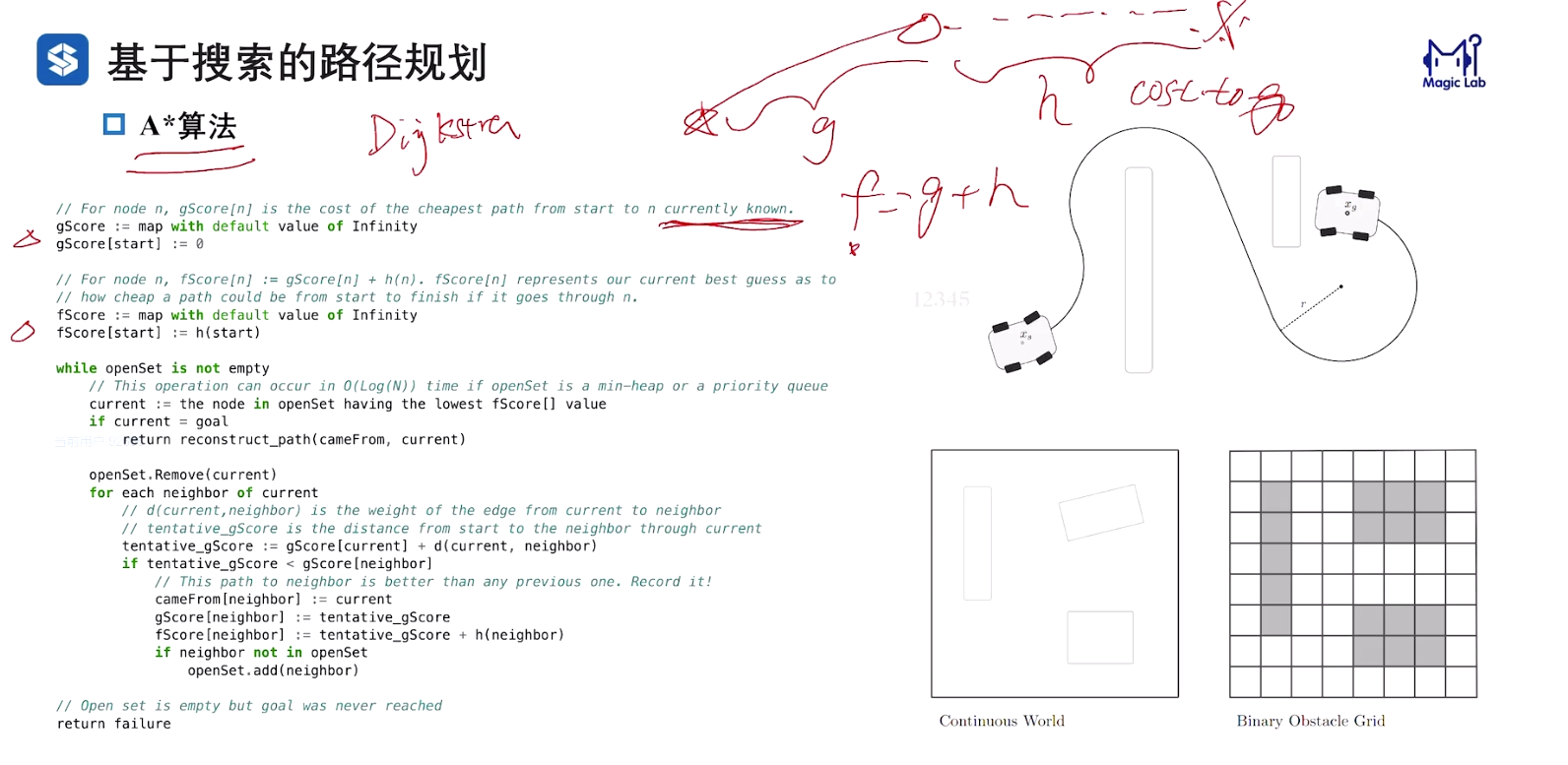
A*算法的核心思想是通过选择最小的f(n)来扩展节点,其中:
f
(
n
)
=
g
(
n
)
+
h
(
n
)
f(n) = g(n) + h(n)
f(n)=g(n)+h(n)
启发式函数
启发式函数h(n)是关键所在,它估计从当前节点到目标节点的代价。常用的启发式函数包括:
- 曼哈顿距离: h ( n ) = ∣ x n − x g o a l ∣ + ∣ y n − y g o a l ∣ h(n) = |x_{n} - x_{goal}| + |y_{n} - y_{goal}| h(n)=∣xn−xgoal∣+∣yn−ygoal∣ 适用于网格状地图。
- 欧几里得距离: h ( n ) = ( x n − x g o a l ) 2 + ( y n − y g o a l ) 2 h(n) = \sqrt{(x_{n} - x_{goal})^2 + (y_{n} - y_{goal})^2} h(n)=(xn−xgoal)2+(yn−ygoal)2
启发式函数需要满足一致性或可接受性,即h(n)不会高估实际代价。
A*算法的优点在于通过启发式函数指导搜索,能够高效地找到最优路径。它在自动驾驶中的应用包括动态路径规划,避免障碍物,并实时更新路径以应对道路上的变化。
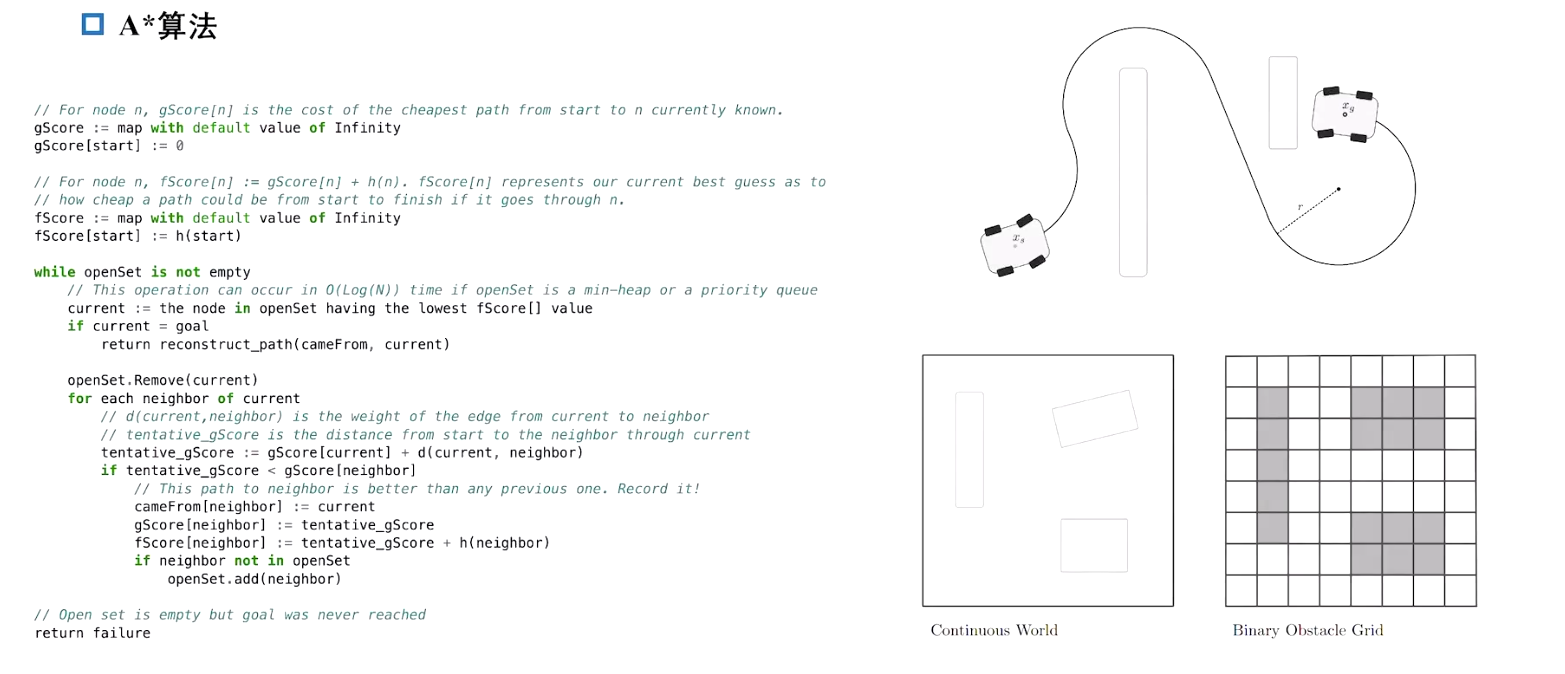
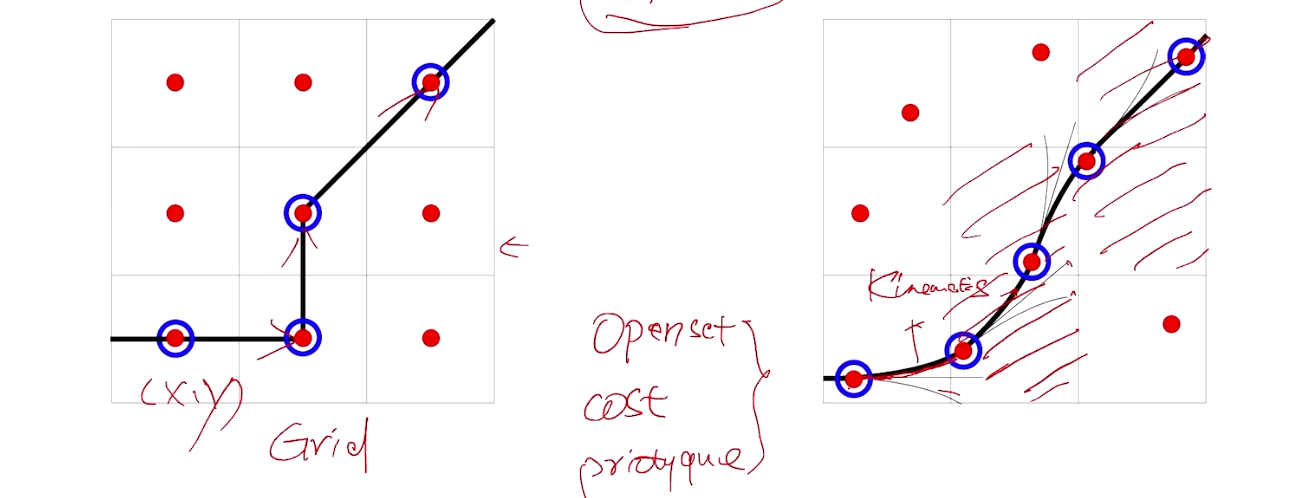
二维格点上进行 A* 算法 缺点:不满足车辆的运动学约束
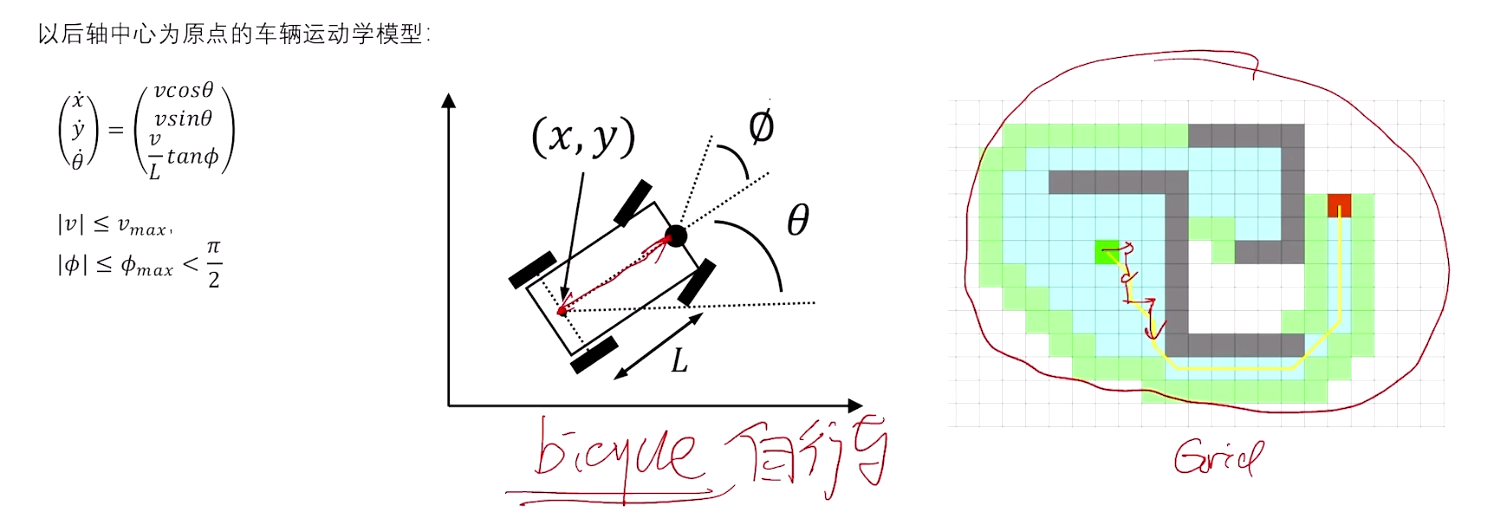
1.2 Hybrid A* 算法
Hybrid含义:
- 节点的拓展基于车辆运动学模型;
- 代价的计算基于栅格化地图;

Hybrid A*算法的关键特性
- 连续空间搜索:
- 传统A算法通常用于离散网格的搜索,例如二维网格上的路径规划。Hybrid A则在连续空间中进行搜索,允许路径规划的结果在更高的精度上表示车辆的位姿(位置和方向)。
- 车辆的状态不仅仅包括其在网格上的位置,还包括其方向和速度等动态信息。
- 车辆动力学约束:
- Hybrid A*考虑车辆的运动学和动力学约束,例如最小转弯半径、最大转向角等。这些约束使得路径规划的结果不仅是可达的,还必须是车辆能够实际执行的。
- 在搜索过程中,Hybrid A*会基于这些约束来生成平滑的轨迹,而不仅仅是直线或折线段。
Dubins 曲线: 经典的圆弧直线法
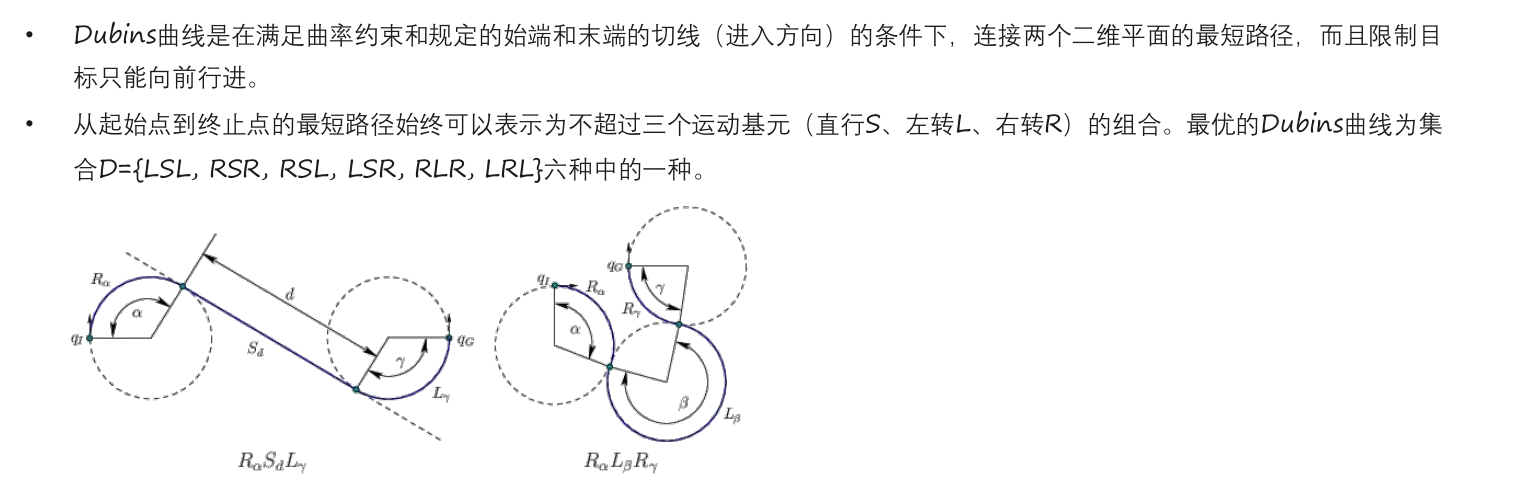
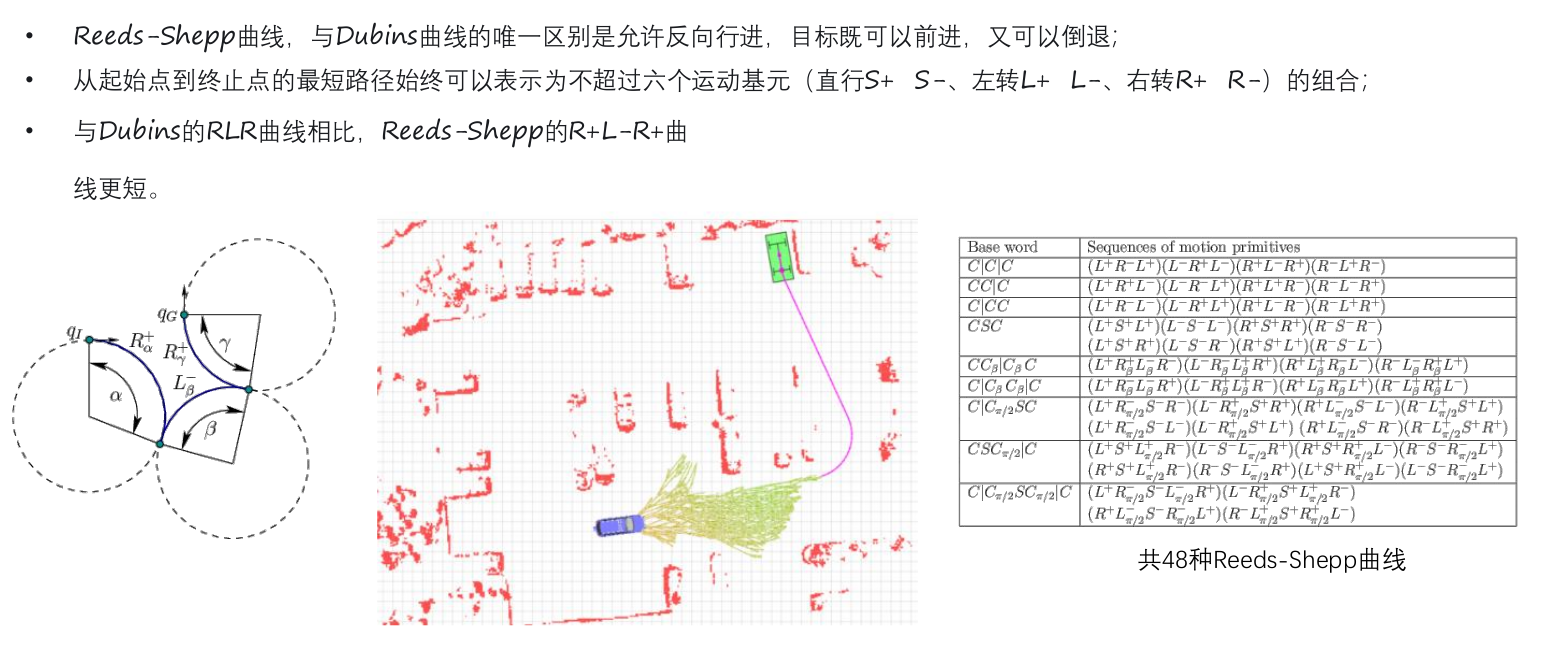
Reeds Shepp 曲线:可以倒车 泊车主流算法。随着无图的自动驾驶,需要基于搜索,Hybrid A* 可以适用该场景。
代价计算:
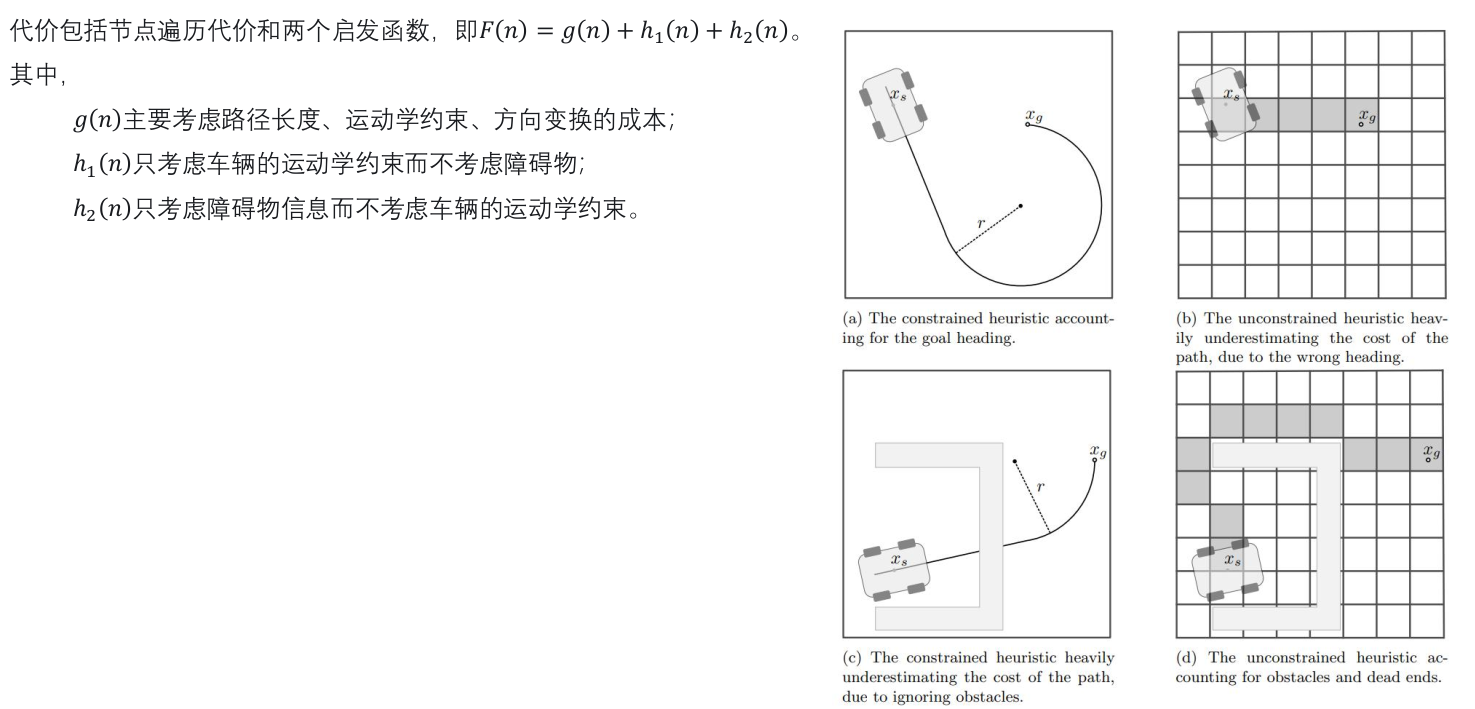
g(n): 路径长度、运动学约束、道路切合程度、方向突变、压实线、逆行等(过程代价,描述已知的代价);
最短路径:
h1(n): 只考虑运动学约束,不考虑障碍物。
h2(n): 只考虑障碍物信息,通过格子去拓展,计算到终点的距离。基于经验,或者存图。
或者 leaning based huritical 。
伪代码流程:

2. 基于采样的路径规划
要求路径的一致性
2.1 Frenét Frame方法

缺点:很难约束极限道路场景下的曲率。(被参考线的曲率所欺骗)
Frenet坐标系是基于车辆的运动路径(通常称为参考路径)建立:
- 切向坐标 s s s: 这是沿着参考路径的距离坐标。它表示在路径上某一点距离起点的弧长,也就是路径上的累计距离。
- 横向坐标 l l l: 这是垂直于参考路径的距离坐标。它表示车辆当前位置偏离参考路径的横向距离,即从路径到车辆的最短距离。
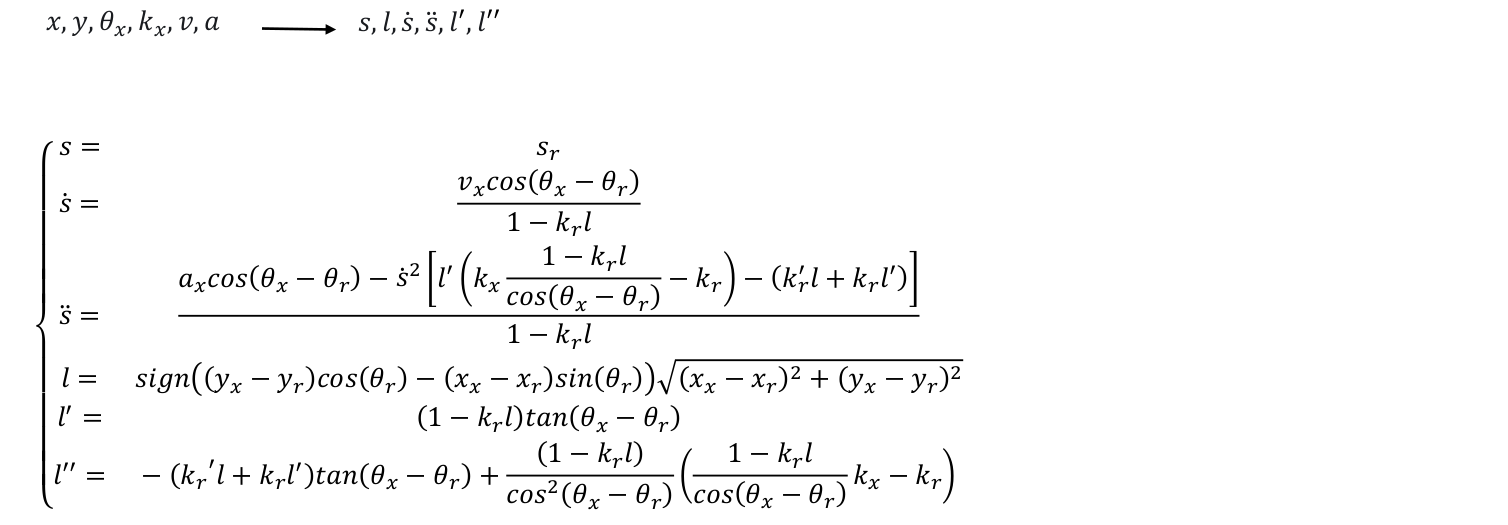
2.2 Cartesian →Frenét 1D ( x , y ) (x, y) (x,y) —> ( s , l ) (s, l) (s,l)
要将笛卡尔坐标系中的位置 ( x , y ) (x, y) (x,y) 转换为 Frenet 坐标系中的 ( s , l ) (s, l) (s,l),需要将车辆在参考路径上的位置进行投影,计算出对应的弧长 ( s ) ( s ) (s) 和横向偏移 ( l ) ( l ) (l)。这个过程可以通过以下几个步骤来实现。
1. 计算 ( s ) (s) (s):找到参考线上距离 ( x , y ) (x, y) (x,y) 最近的投影点
方法 1:暴力遍历或二分查找(用于离散点形式的参考线)
-
暴力遍历:对参考线上的每个点计算到 (x, y) 的距离,选择距离最小的点作为投影点。
d i = ( x − x i ) 2 + ( y − y i ) 2 d_i = \sqrt{(x - x_i)^2 + (y - y_i)^2} di=(x−xi)2+(y−yi)2
其中, ( ( x i , y i ) ) ( (x_i, y_i) ) ((xi,yi)) 是参考线上的一个离散点。找到最小距离 ( d i ) ( d_i ) (di) 所对应的点 ( x i , y i ) (x_i, y_i) (xi,yi),然后计算出该点对应的弧长 ( s ) (s) (s)。
-
二分查找:如果参考线是有序的,可以利用二分查找来加速寻找最近的点。
方法 2:梯度优化(用于多项式形式的参考线)
- 如果参考线由一个多项式表示,可以使用梯度下降法来找到 ( x , y ) (x, y) (x,y) 到参考线的最短距离。设参考线方程为 ( y = f ( x ) ) ( y = f(x) ) (y=f(x)),则需要找到一个 ( x ∗ ) ( x^* ) (x∗),使得
d ( x ∗ ) = ( x − x ∗ ) 2 + ( y − f ( x ∗ ) ) 2 d(x^*) = \sqrt{(x - x^*)^2 + (y - f(x^*))^2} d(x∗)=(x−x∗)2+(y−f(x∗))2
使 ( d ( x ∗ ) ( d(x^*) (d(x∗) 最小化。可以通过迭代的方法来求解这个优化问题,最终得到对应的 ( x ∗ ) ( x^*) (x∗) 和 ( y ∗ = f ( x ∗ ) ( y^* = f(x^*) (y∗=f(x∗)。
- 一旦找到最近点 ( x ∗ , y ∗ ) (x^*, y^*) (x∗,y∗),可以计算出对应的弧长 ( s ) ( s ) (s),这通常可以通过数值积分计算,也可以根据预先计算的参考路径上的弧长来直接查表得到。
2. 计算 ( l ) ( l ) (l):使用三角形向量关系
找到最近的投影点后,计算横向偏移 ( l ) ( l ) (l):
-
向量定义:
- r ( s ) \mathbf{r}(s) r(s) 是参考线上点 ( s ) (s) (s) 处的坐标向量。
- p ( x , y ) \mathbf{p}(x, y) p(x,y) 是车辆当前位置的坐标向量。
- n ( s ) \mathbf{n}(s) n(s) 是参考线上 ( s ) (s) (s) 处的法向量。
-
横向位移 ( l ) ( l ) (l) 的计算:
通过向量的点积可以计算出横向位移 ( l ) ( l ) (l):
l = ( p − r ( s ) ) ⋅ n ( s ) l = (\mathbf{p} - \mathbf{r}(s)) \cdot \mathbf{n}(s) l=(p−r(s))⋅n(s)
其中, n ( s ) \mathbf{n}(s) n(s) 是垂直于参考线在 ( s ) ( s) (s) 处的法向量。如果法向量朝向参考线左侧,那么 ( l ) ( l ) (l) 为正,反之为负。
核心步骤总结
- 求 ( s ) ( s ) (s):找到离车辆位置 ( x , y ) (x, y) (x,y)最近的参考线点,这可以通过暴力搜索或优化方法实现。
- 求 ( l ) ( l ) (l):通过计算车辆位置和参考线投影点的法向量点积,求得横向偏移 ( l ) ( l ) (l)。
实际应用中的注意事项
- 参考线左侧、右侧方向不一致:需要注意法向量的方向。一般通过约定参考线法向量方向或使用方向向量进行修正,确保在 Frenet 坐标系中,左侧偏移为正,右侧偏移为负。
- 参考线的光滑性:如果参考线不是光滑的,则可能需要对参考线进行平滑处理,以确保计算结果的精度和稳定性。

求解S 代码:EPSILON/core/common/src/common/lane/lane.cc
ErrorType Lane::GetArcLengthByVecPosition(const Vecf<LaneDim>& vec_position,
decimal_t* arc_length) // 寻找距离自车最近的点
ErrorType Lane::GetArcLengthByVecPositionWithInitialGuess( const Vecf<LaneDim>& vec_position, const decimal_t& initial_guess, decimal_t* arc_length) //牛顿法来近似计算曲线长度
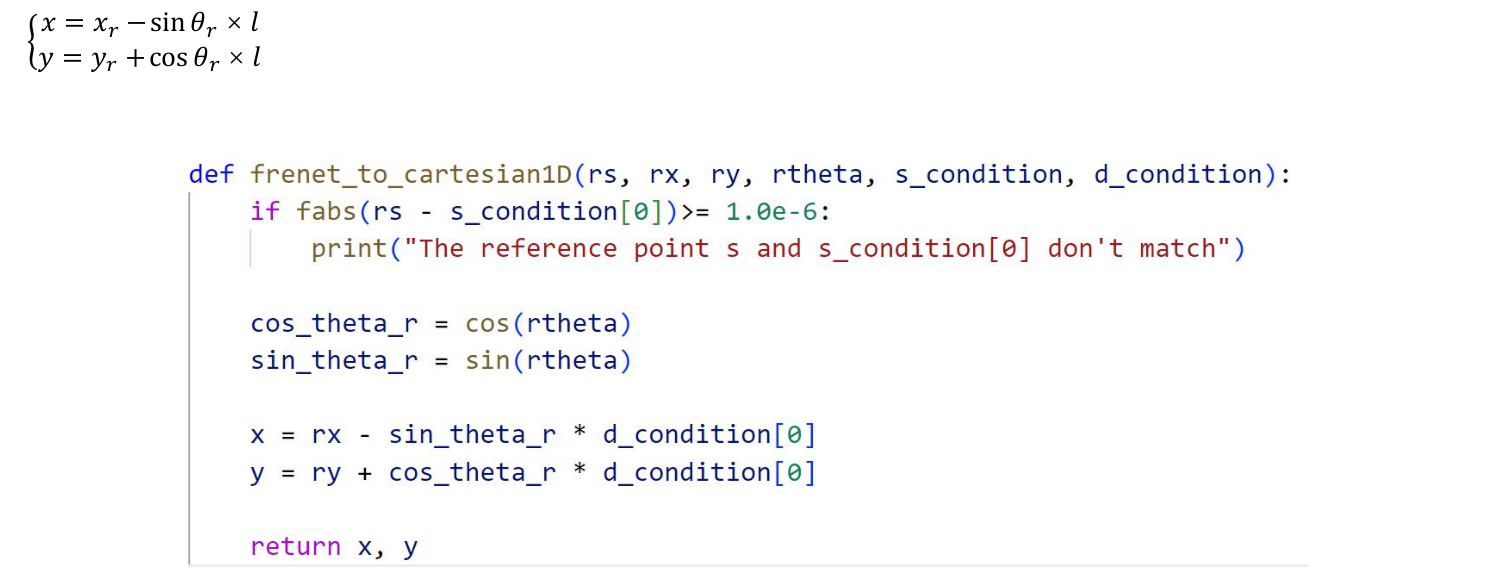
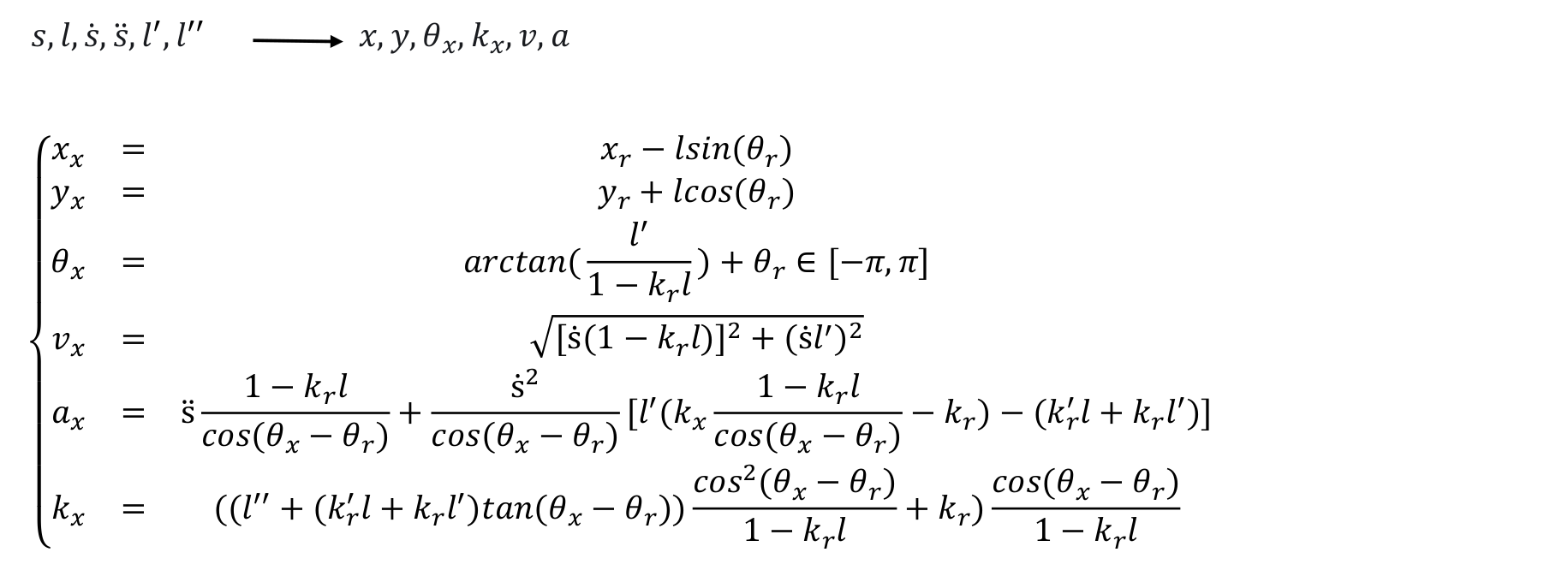
2.3 Cartesian →Frenét 3D
Frenét → Cartesian 3D
参考链接:
https://blog.csdn.net/qq_23981335/article/details/102832823
https://blog.csdn.net/AdamShan/article/details/80779615
2.4 贝尔曼Bellman最优性原理
贝尔曼最优原理(Bellman’s Principle of Optimality)是动态规划(Dynamic Programming)中的核心思想之一。它是由美国数学家理查德·贝尔曼(Richard Bellman)提出的,用于解决多阶段决策问题。它的核心思想是,无论过程过去的状态和决策如何,对前面的决策所形成的状态而言,余下的决策必须构成最优策略。这个原理可以将一个复杂的问题分解为子问题,通过递归地解决这些子问题来找到最优解。
贝尔曼最优原理的定义
贝尔曼最优原理可以表述为:
一个问题的最优策略具备这样的性质:无论初始状态及初始决策如何,余下的决策必须构成最优策略,即从当前状态开始的决策序列是问题的最优解。
换句话说,假设一个问题可以分解为多个阶段,每个阶段的决策都会影响后续阶段的状态。贝尔曼最优原理指出,如果我们已经知道某个阶段之后的决策序列是最优的,那么在之前阶段的决策也必须是最优的,以确保整个决策序列是最优的。
形式化描述
假设我们有一个决策问题,它可以分为若干阶段。每个阶段的状态可以表示为 ( s ) ( s ) (s),在每个状态 ( s ) ( s ) (s) 下,可以选择一个决策 ( a ) ( a ) (a),该决策会带来一个即时奖励 ( r ( s , a ) ( r(s, a) (r(s,a)),并将系统转移到下一个状态 ( s ′ ) ( s' ) (s′)。
令 ( V ( s ) ) (V(s)) (V(s)) 表示从状态 ( s ) ( s) (s)开始并且遵循最优策略所能获得的最大期望收益。那么贝尔曼最优原理的递推公式(贝尔曼方程)可以表示为:
V ( s ) = max a [ r ( s , a ) + γ V ( s ′ ) ] V(s) = \max_a \left[ r(s, a) + \gamma V(s') \right] V(s)=amax[r(s,a)+γV(s′)]
其中:
- ( max a ) (\max_a ) (maxa) 表示在所有可能的行动 ( a ) ( a) (a) 中选择使得收益最大的那个行动。
- ( r ( s , a ) ) ( r(s, a) ) (r(s,a)) 是在状态 ( s ) (s) (s) 采取行动 ( a ) (a) (a) 所获得的即时奖励。
- ( γ ) ( \gamma) (γ) 是折扣因子,用于表示未来收益的重要性。
- ( s ′ ) ( s' ) (s′) 是在状态 ( s ) ( s ) (s) 采取行动 ( a ) ( a ) (a) 后到达的下一个状态。
这个公式表示,从状态 ( s ) (s) (s) 开始的最优价值 ( V ( s ) ) (V(s)) (V(s)) 是选择一个最优行动 ( a ) ( a ) (a) ,使得当前的即时奖励和未来各阶段的最优价值(考虑到折扣因子)之和最大。
贝尔曼最优原理的优势
- 递归结构:贝尔曼方程提供了一个递归结构,允许我们通过逐步求解子问题来解决复杂的决策问题。
- 最优性保证:遵循贝尔曼最优原理的策略确保了最终解是全局最优的,而不是局部最优。
贝尔曼方程 时间一致性
V
(
t
,
k
t
)
=
max
c
t
[
f
(
t
,
k
t
,
c
t
)
+
V
(
t
+
1
,
g
(
t
,
k
t
,
c
t
)
)
]
V(t, k_t) = \max_{c_t} \left[ f(t, k_t, c_t) + V(t + 1, g(t, k_t, c_t)) \right]
V(t,kt)=ctmax[f(t,kt,ct)+V(t+1,g(t,kt,ct))]
这里的
(
V
(
t
,
k
t
)
)
( V(t, k_t))
(V(t,kt)) 是在时间
(
t
)
( t )
(t) 和状态
(
k
t
)
( k_t)
(kt) 下的最优价值函数。方程表明,最优决策是在当前时间
(
t
)
( t )
(t) 选择一个最优的控制 KaTeX parse error: Can't use function '\)' in math mode at position 7: ( c_t \̲)̲ ,使得当前的收益和下一步的最优价值之和最大。
-
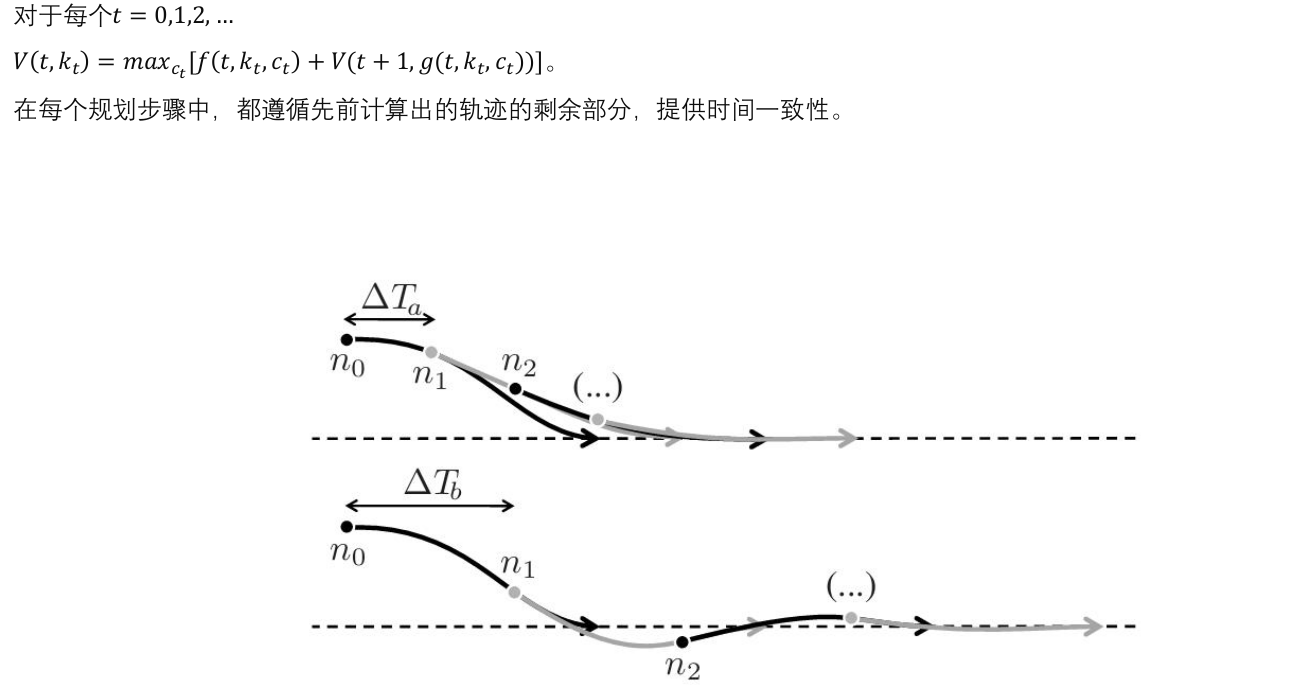
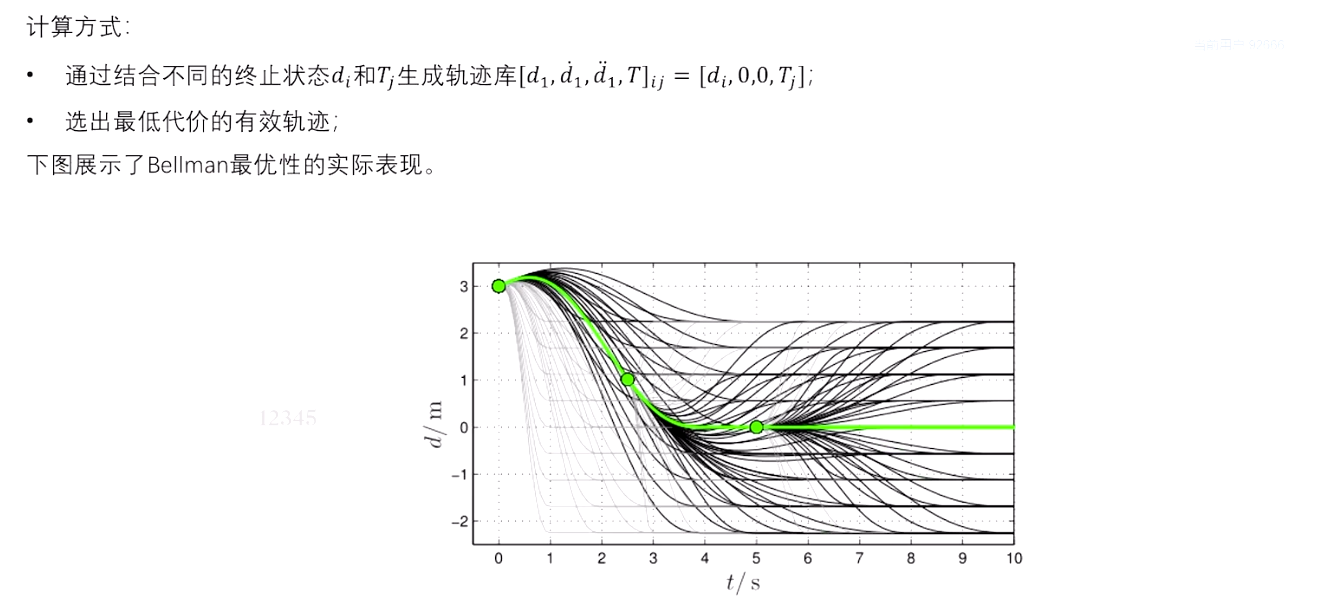
轨迹的时间一致性:
在轨迹规划中,为了确保每一步规划的轨迹是连续且光滑的,需要遵循之前计算出的轨迹的剩余部分,确保时间一致性。 -
路径对比:
图中展示了两条不同时间步长下的轨迹规划( ( Δ T a ) ( \Delta T_a ) (ΔTa) 和 ( Δ T b ) \Delta T_b ) ΔTb) )。这反映了在不同的时间尺度上,基于贝尔曼最优原理规划出的路径,如何在每个阶段选择最优的路径。
符合Bellman最优性 --> 解决最优控制问题
2.5 高速轨迹采样——横向
高速——横向运动相比于纵向运动相对幅度非常小,近似横纵向解耦,横纵向可独立计算。
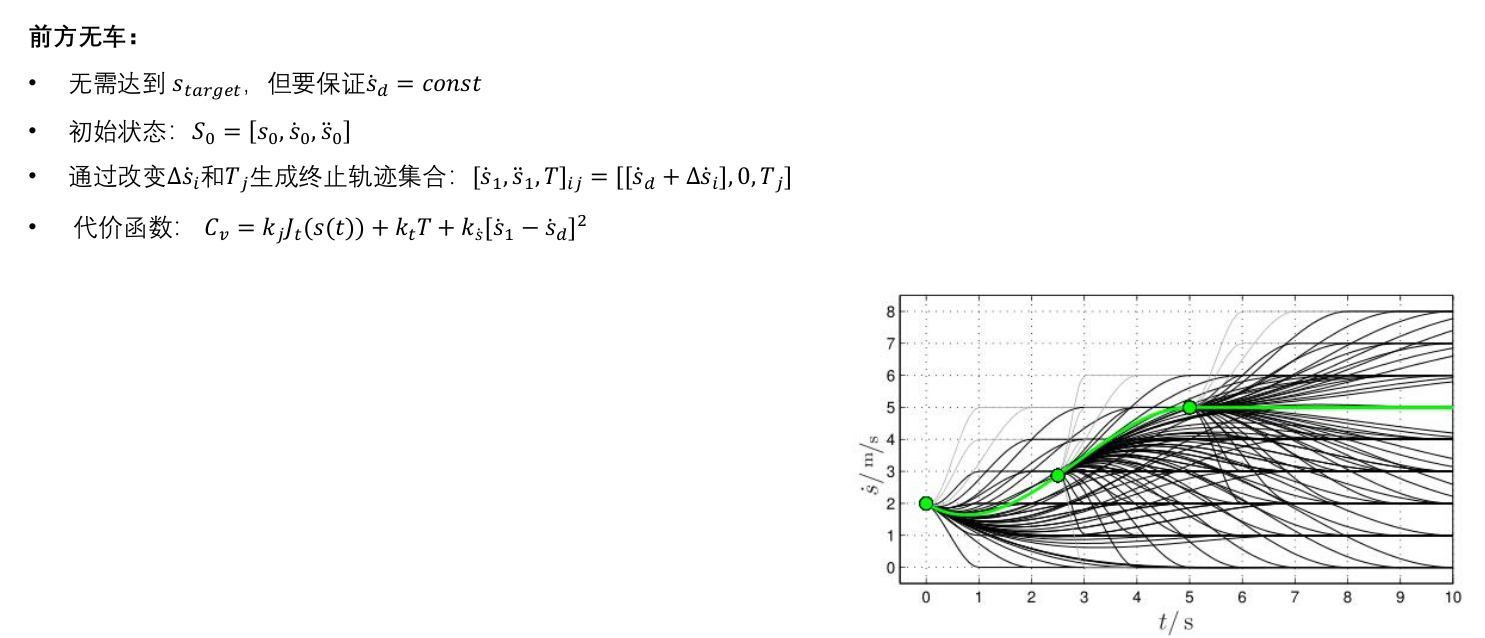
2.6 高速轨迹采样——纵向

2.7 低速轨迹规划——横向
低速——横向运动和纵向运动可比,而车辆有运动学约束,横纵向解耦会忽略运动学约束。
沿 S 采样。

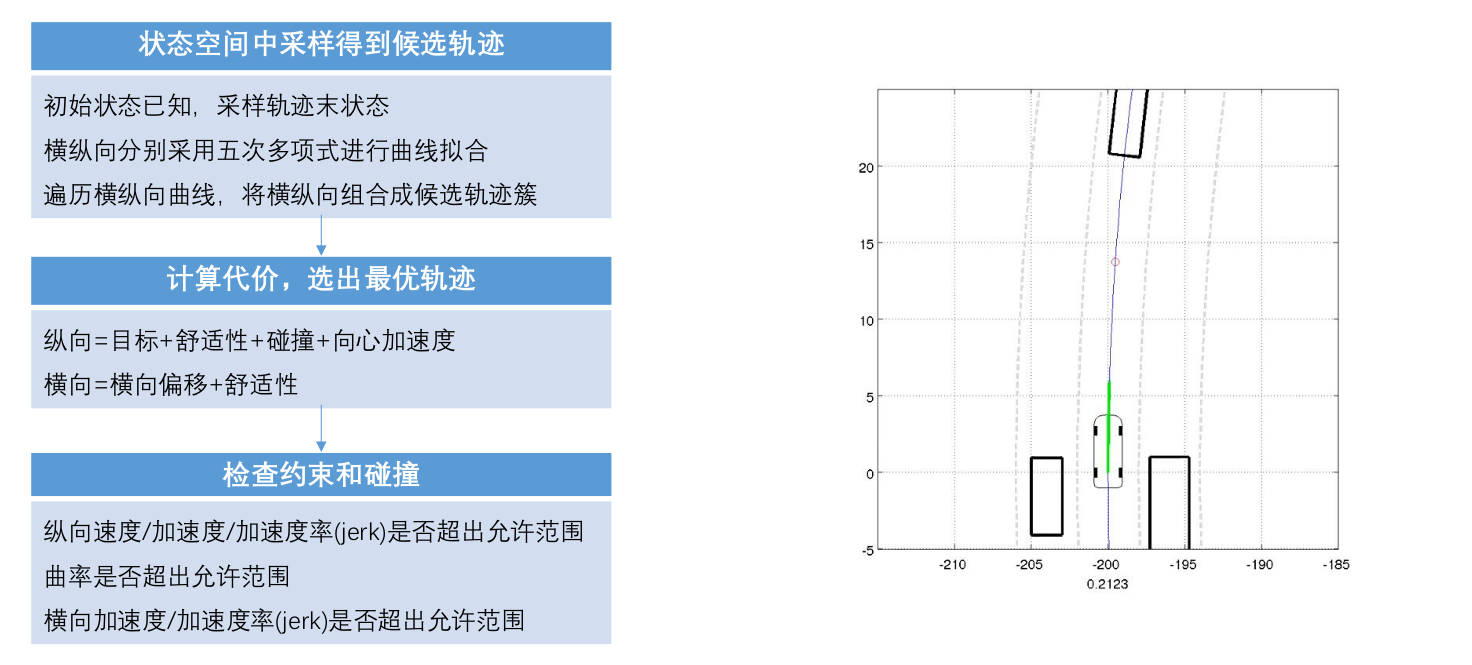
横纵向采样轨迹结合以及代价评估
高速:横纵向解耦 s ( t ) / d ( t ) s(t)/d(t) s(t)/d(t)
低速:耦合 s ( t ) d ( s ) s(t)d(s) s(t)d(s)
如何确保曲率符合要求: 大曲率要额外反投。 高低速、大小曲率。

2.8 总结
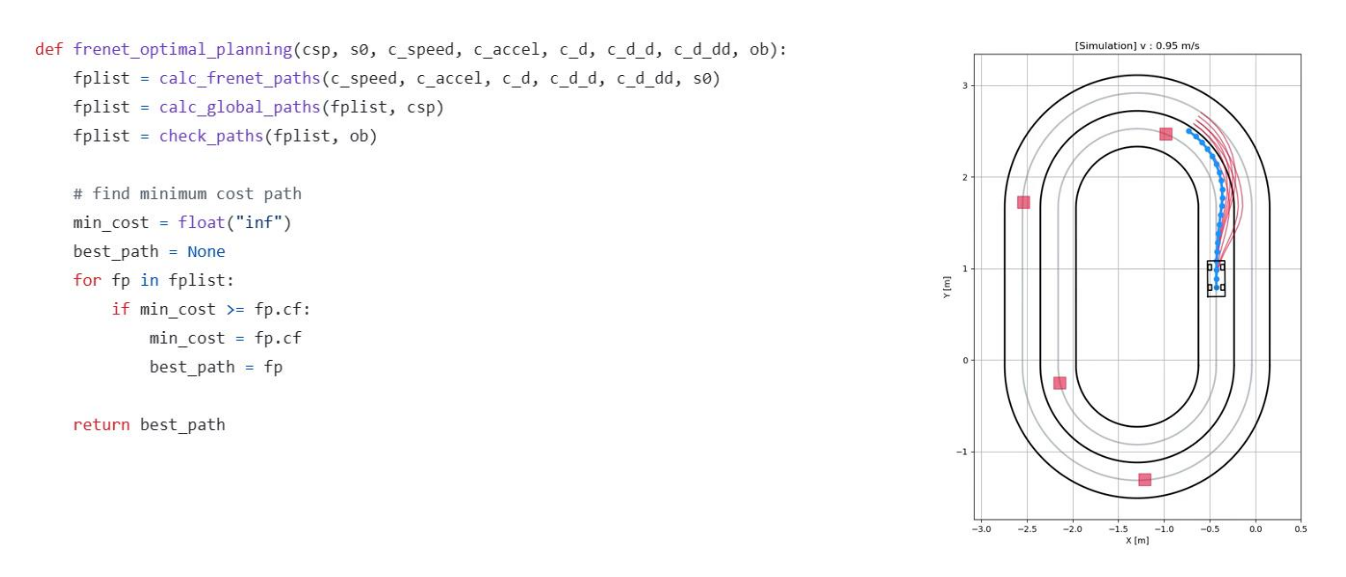
整体流程:
简单示例:
相关参考材料:
-
https://zhuanlan.zhihu.com/p/514864431
-
https://xueshu.baidu.com/usercenter/paper/show?paperid=14ec16ebb0e97cb89598c0aaef9f76d4&site=xueshu_se&hitarticle=1
-
https://blog.csdn.net/sinat_52032317/article/details/132924715?spm=1001.2101.3001.6650.1&utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromBaidu%7ERate-1-132924715-blog-118462640.235%5Ev43%5Epc_blog_bottom_relevance_base6&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromBaidu%7ERate-1-132924715-blog-118462640.235%5Ev43%5Epc_blog_bottom_relevance_base6&utm_relevant_index=2
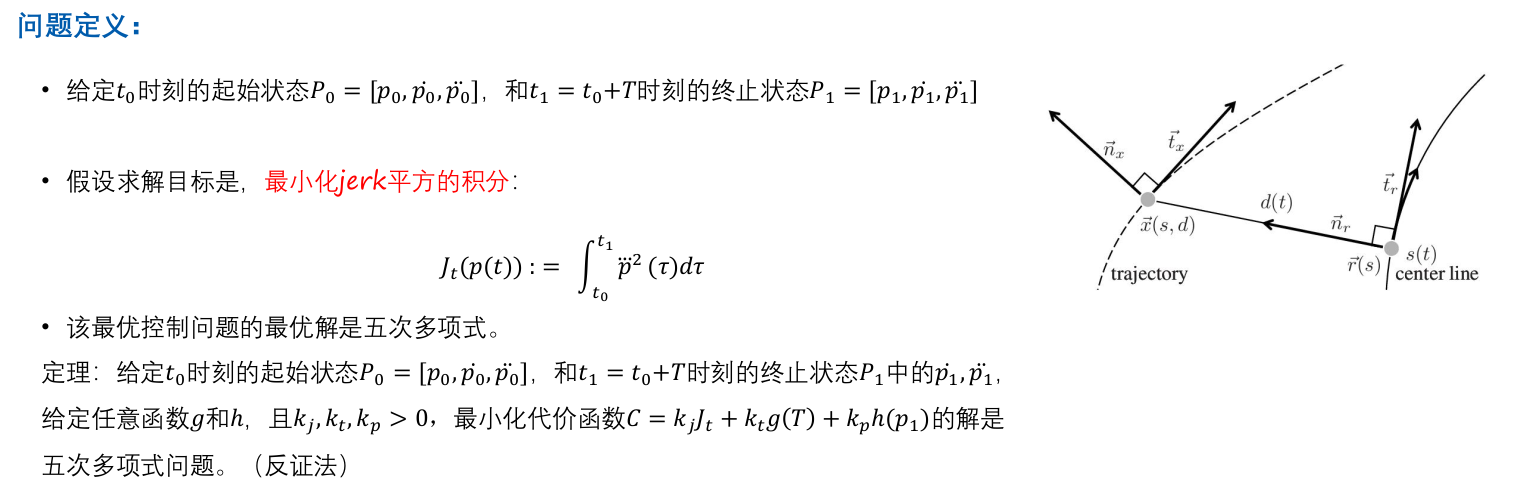
3. 基于优化的路径规划
3.1 以百度Apollo EM planner为例
整体框架:
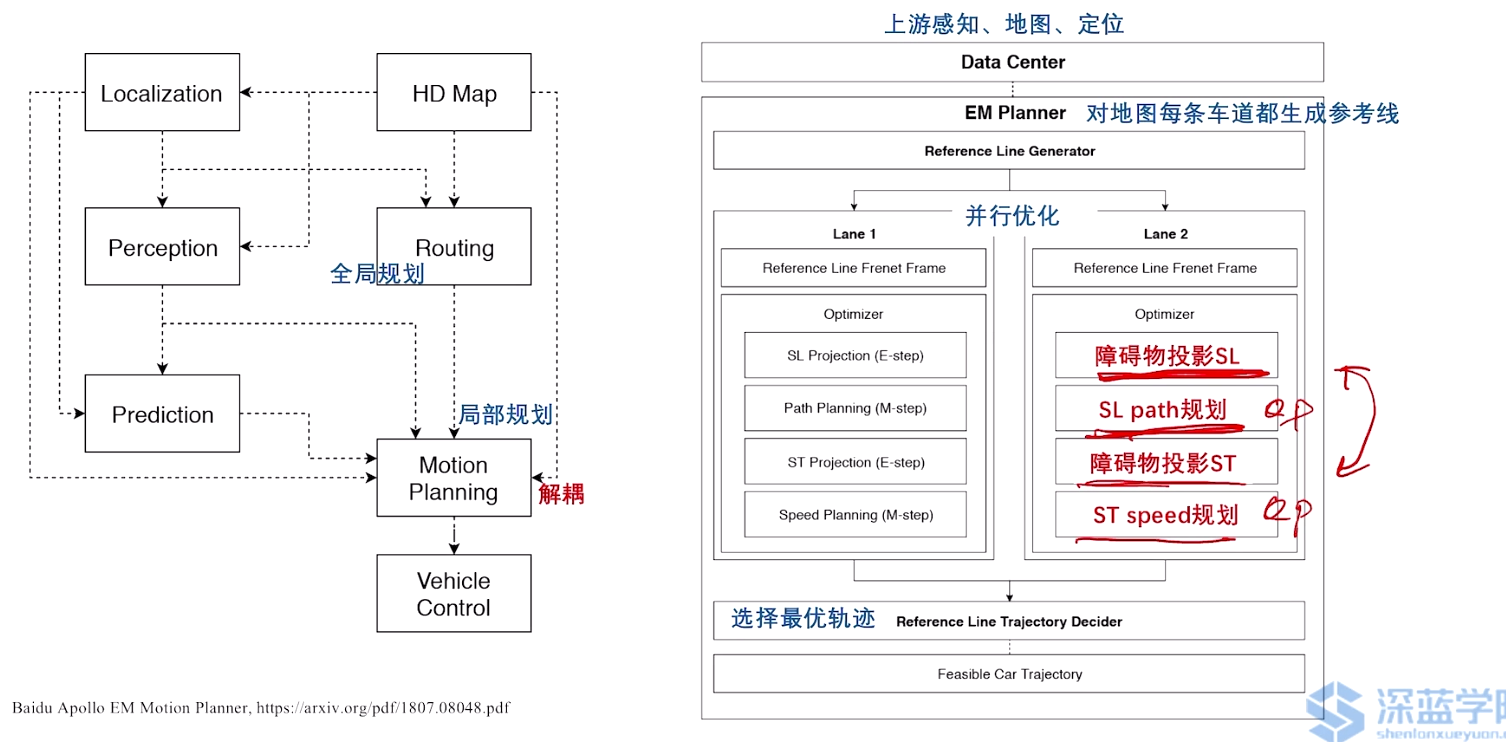
3.2 M-Step DP Path
路径:如何在 S L 坐标系下生成一条path,且满足一定的约束。
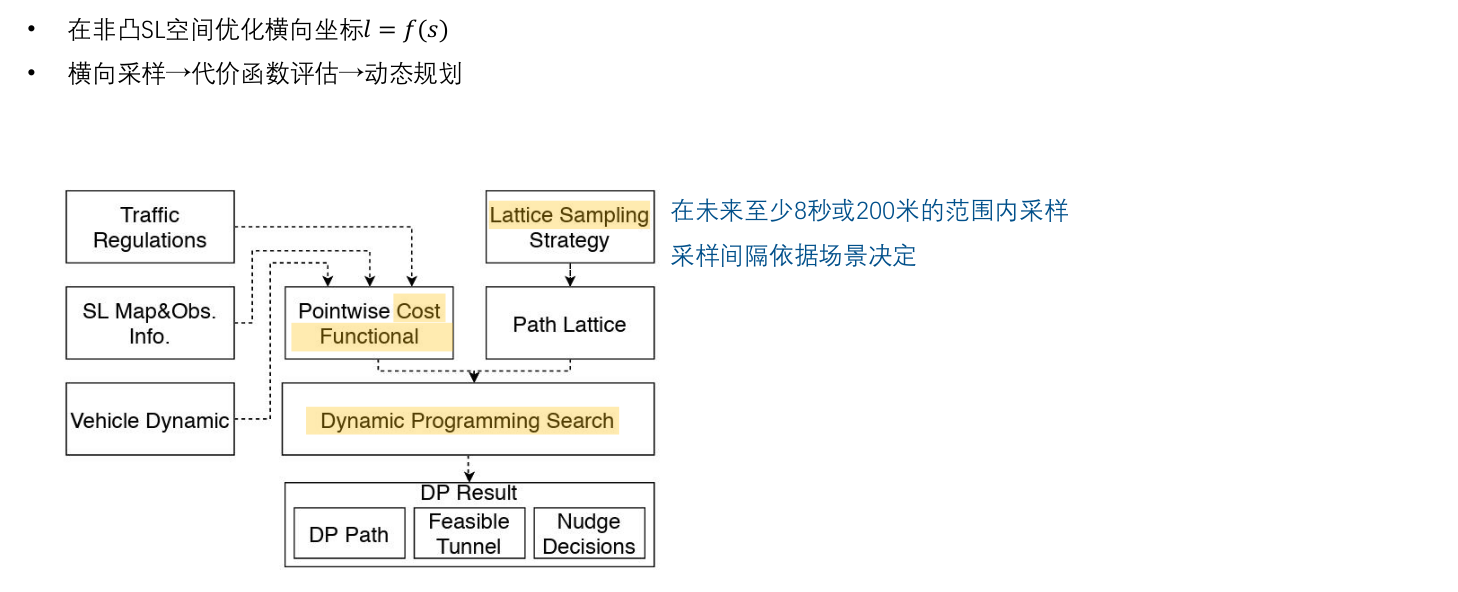
以向下绕行为例:
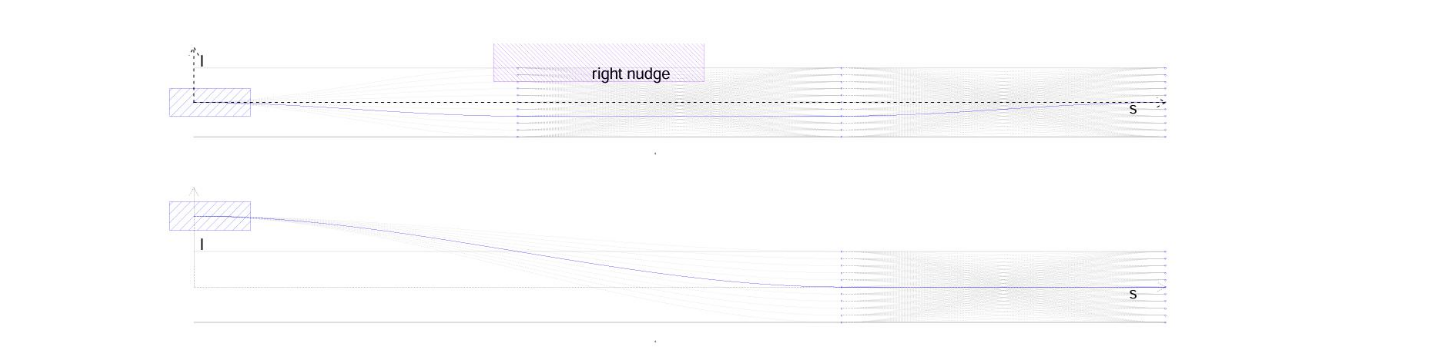
如果决策可以判断需要向下绕行 --> 可得到避障的上下界, Lower bound ≤ L(s) ≤ Upper bound --> Cost(f)
按照其他cost function 优化求解轨迹。
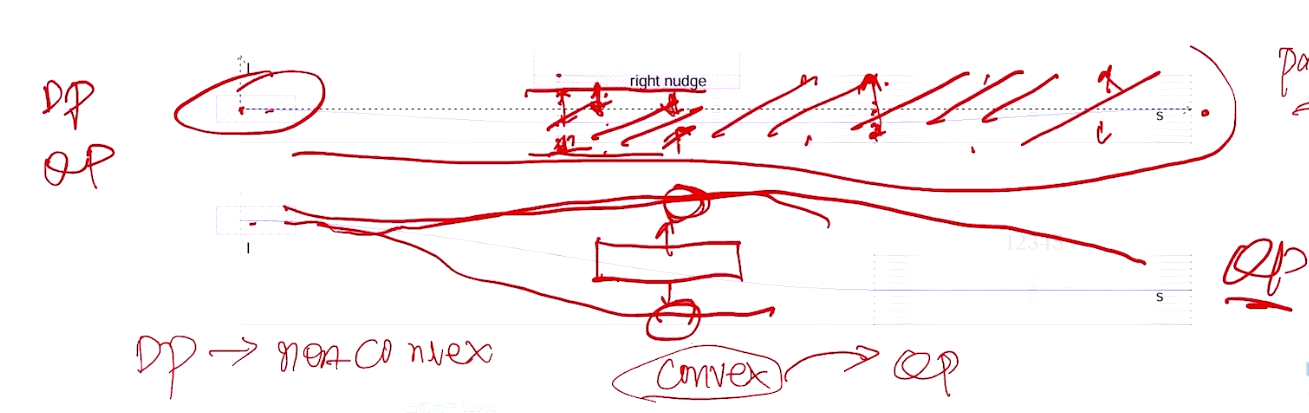
避障问题 --> 导致非凸 --> DP --> 初始解 --> QP 求解
避障问题 --> 如果可得到避障的上下界 --> 改为 cost function --> QP 求解

M-Step QP Path ——修正DP的path
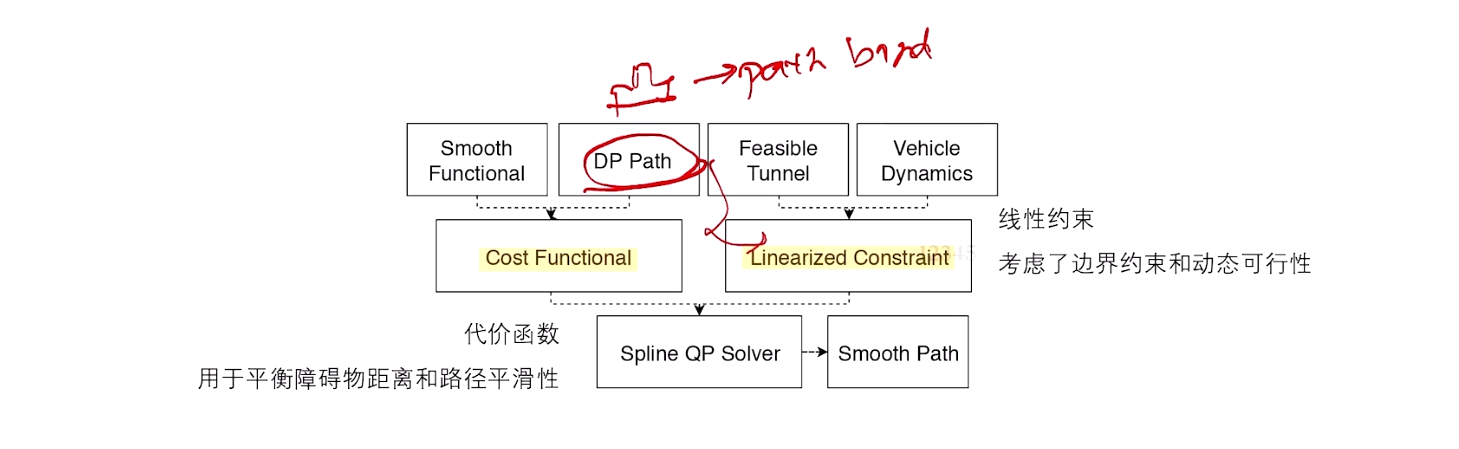
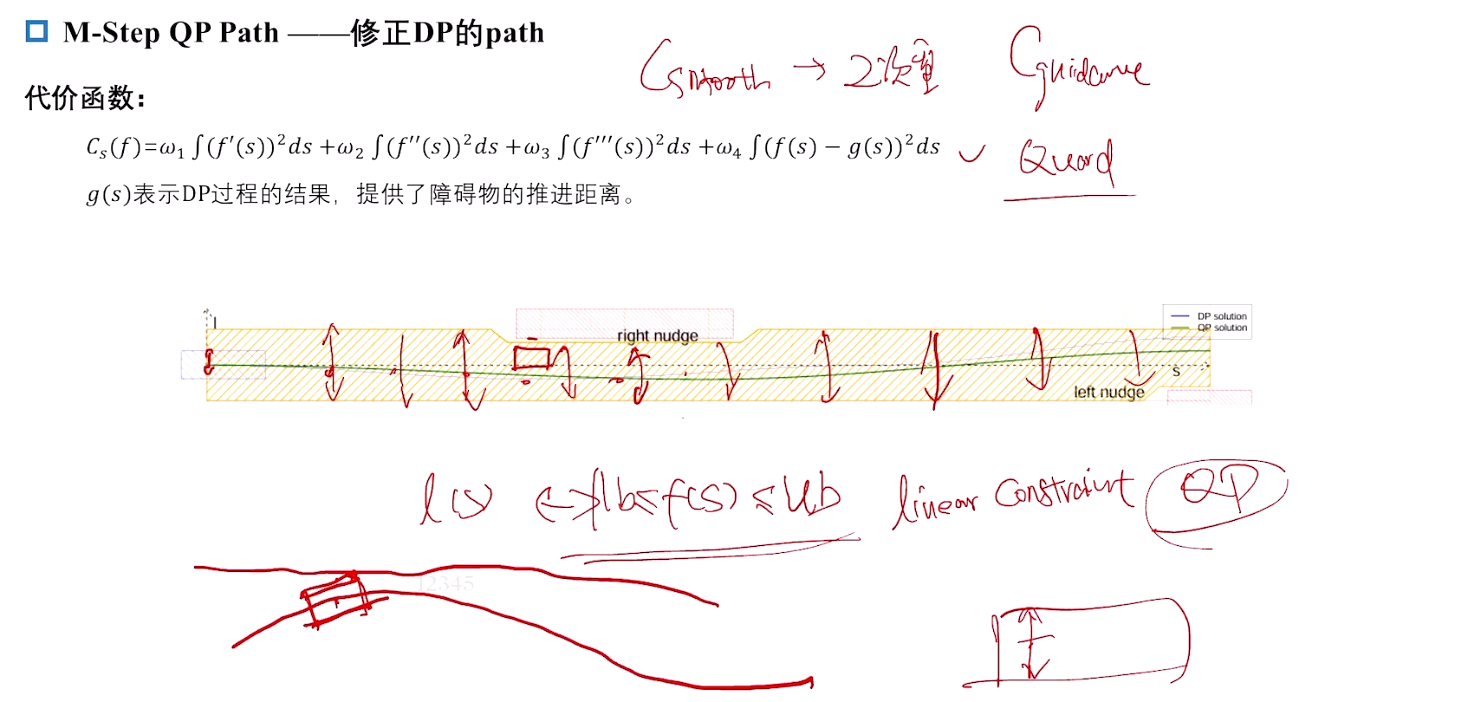
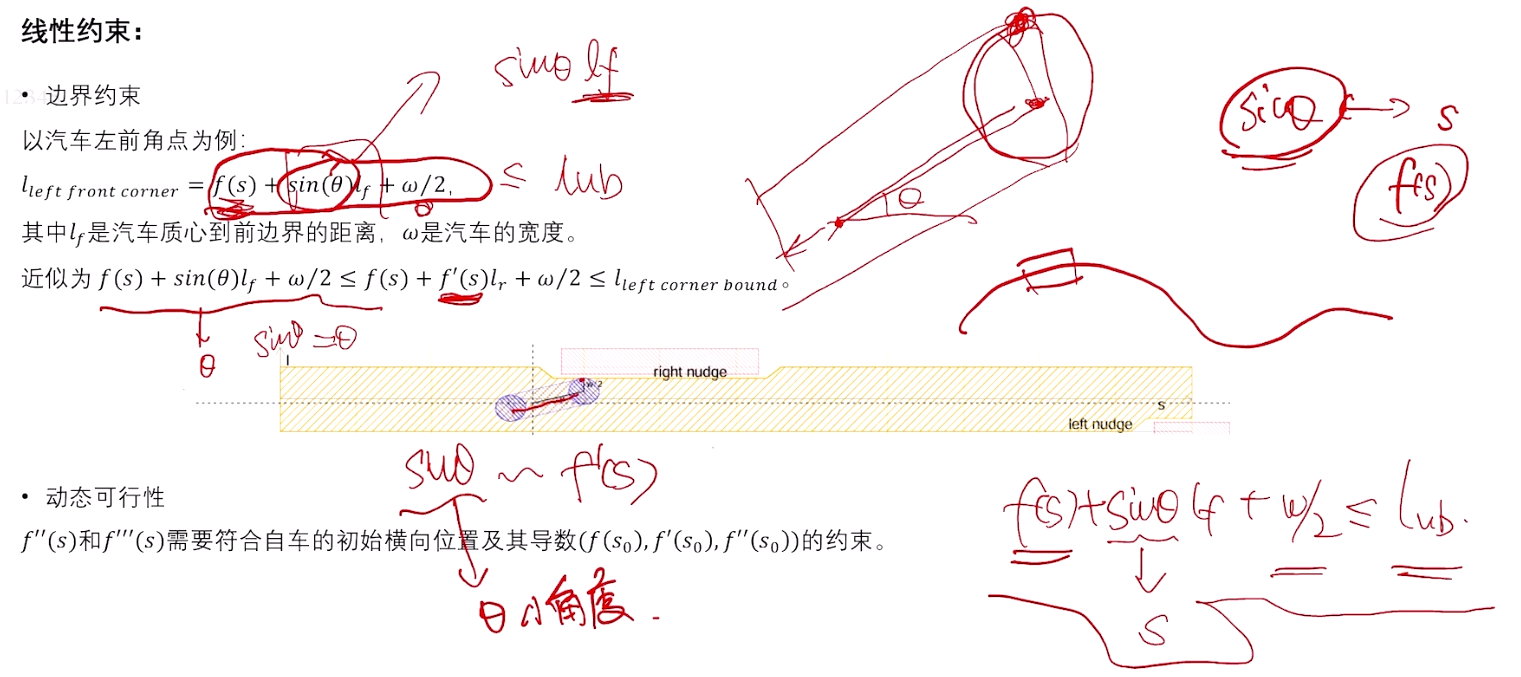
对自车碰撞处理,自车前角点做映射。当 θ \theta θ 很小时,近似等于 s i n ( θ ) sin(\theta) sin(θ) , 再近似角度的抬高距离,f’(s)。
纵向 非凸,可加速、减速。一般需要用DP搜索,克服非凸性。
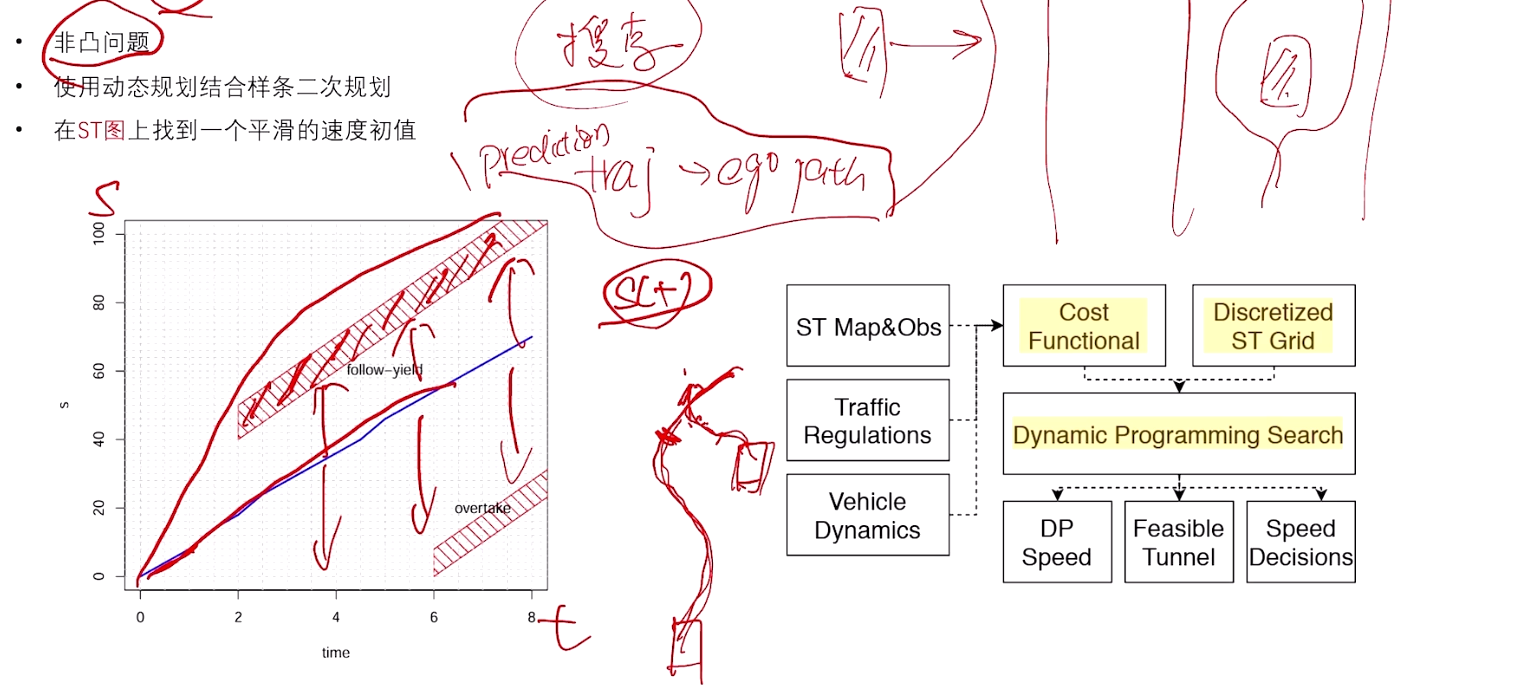
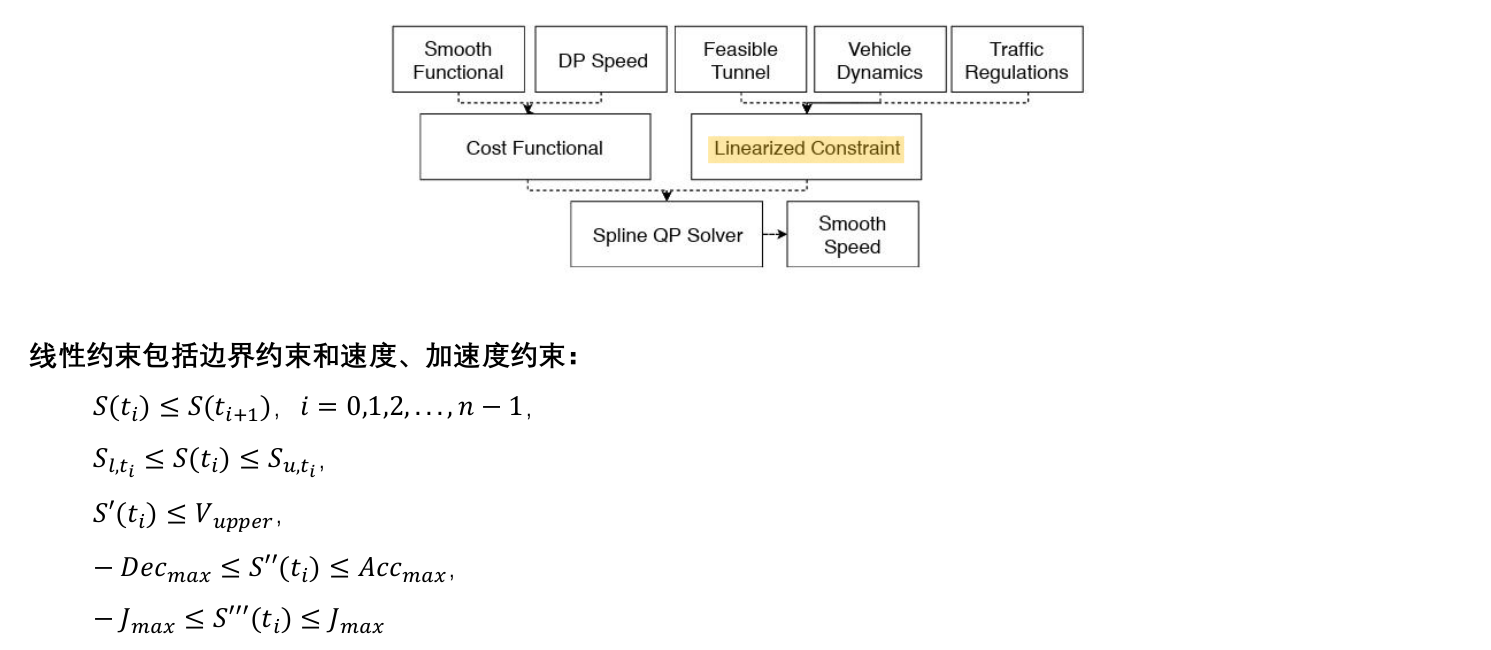
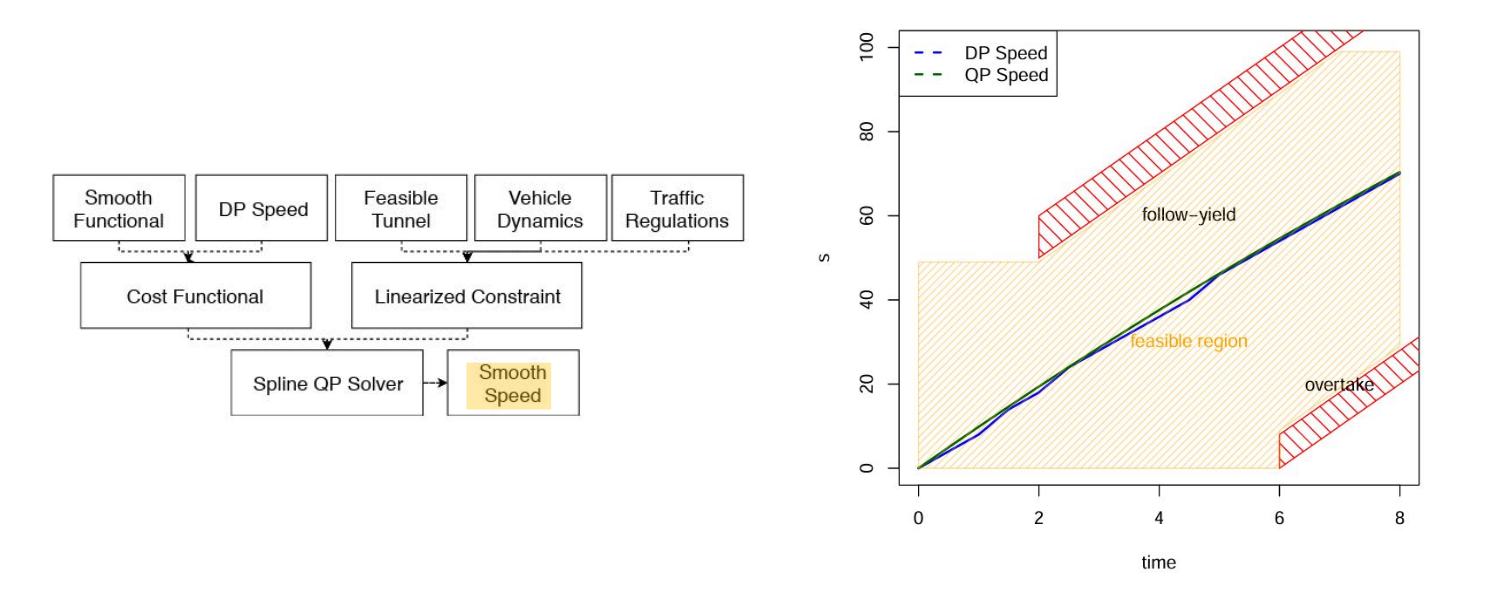
3.3 M-Step DP Speed Optimizerp
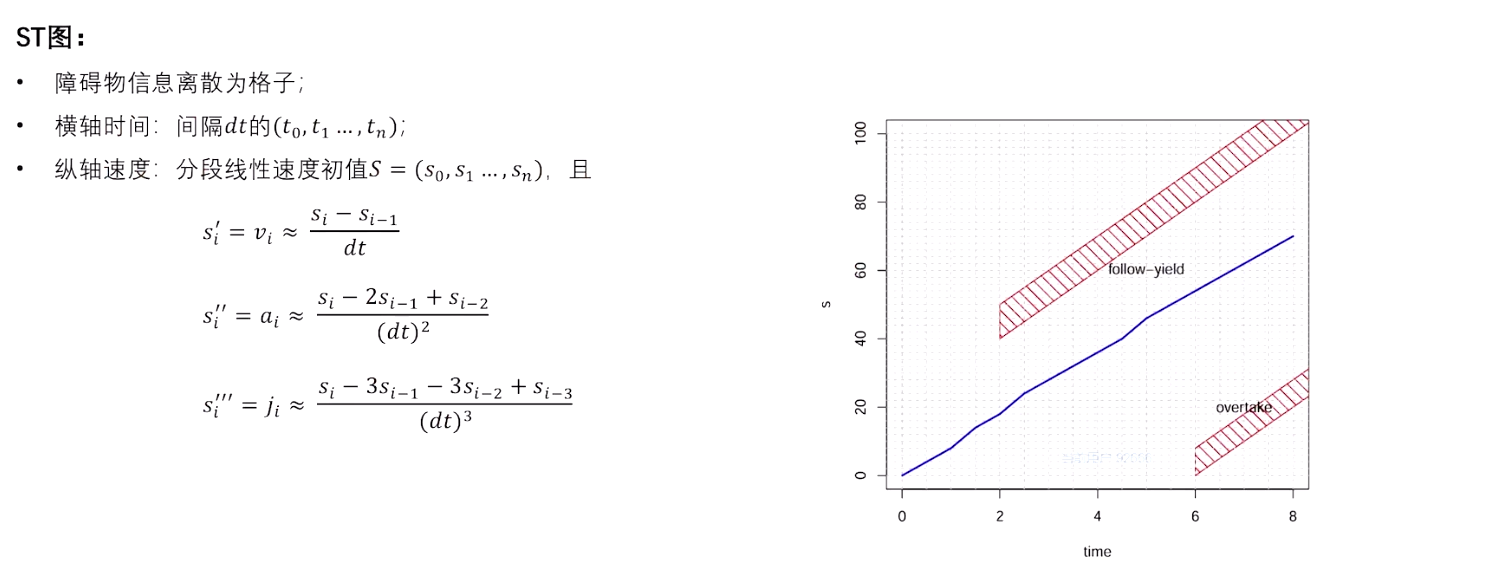

M-Step QP Speed Optimizer ——使得DP生成的分段线性速度初值满足动态要求
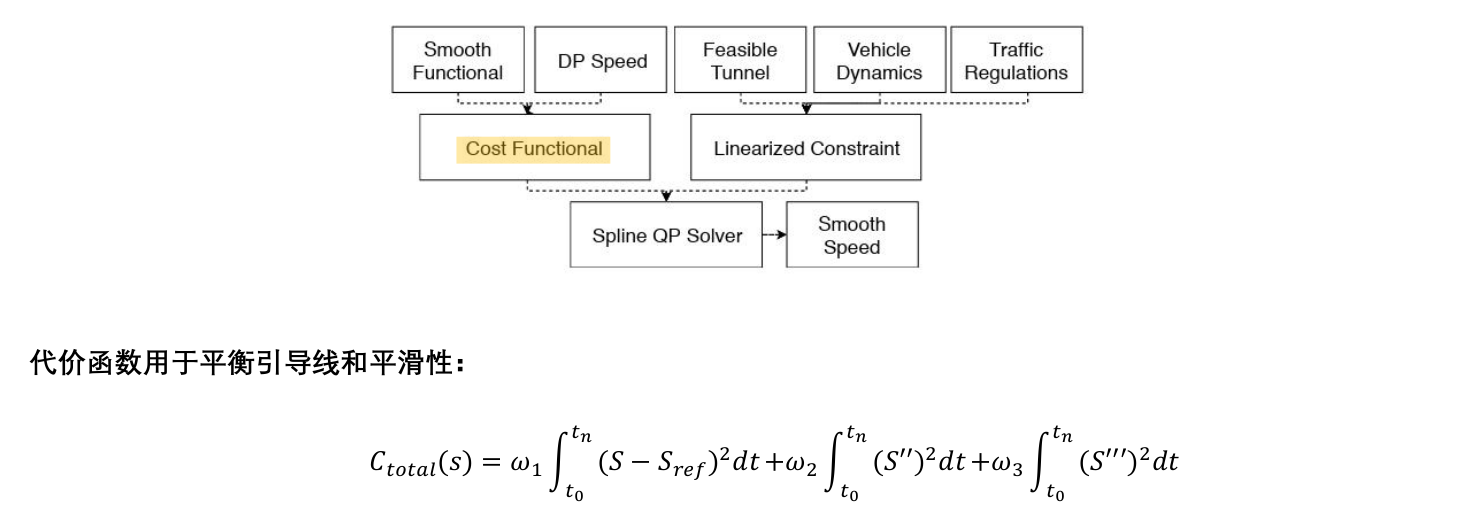
总结
DP+QP
- DP:生成粗解和凸空间
- QP:在凸空间求解
- 缺点:窄道会车场景
EM planner 参考:
https://arxiv.org/pdf/1807.08048.pdf
https://gitcode.com/ApolloAuto/apollo/tree/master/modules/planning?utm_source=csdn_github_accelerator&isLogin=1
https://blog.csdn.net/qq_39805362/article/details/128850317
https://blog.csdn.net/qq_41667348/article/details/125708616