【无人机设计与控制】 基于matlab的蚁群算法优化无人机uav巡检
摘要
本文使用蚁群算法(ACO)优化无人机(UAV)巡检路径。无人机巡检任务要求高效覆盖特定区域,以最小化能源消耗和时间。本研究提出的算法通过仿生蚁群算法优化巡检路径,在全局搜索和局部搜索中平衡探索与开发,确保无人机能够在复杂环境中实现有效的路径规划。实验结果表明,蚁群算法能够在不增加计算复杂度的情况下,显著提升巡检效率。
理论
蚁群算法(Ant Colony Optimization, ACO)是一种基于生物仿生学的优化算法,它模拟蚂蚁群体觅食的行为,通过信息素的传递和更新,逐步优化路径选择。蚁群算法的基本原理可以分为以下几个步骤:
-
初始化: 为蚂蚁群体分配初始位置,每只蚂蚁根据路径信息素浓度选择下一步行动方向。
-
路径选择: 蚂蚁根据当前路径上的信息素和距离等因素,遵循一定的概率规则选择下一站。
-
信息素更新: 每只蚂蚁完成路径后,会根据路径的优劣对路径上的信息素进行更新。较优路径上的信息素浓度增加,其他路径的信息素逐渐挥发。
-
迭代搜索: 重复路径选择和信息素更新,直到算法达到终止条件,如迭代次数或收敛准则。
在无人机巡检任务中,蚁群算法被用来寻找到多个巡检点的最优或次优路径,从而最小化路径长度和时间。
实验结果
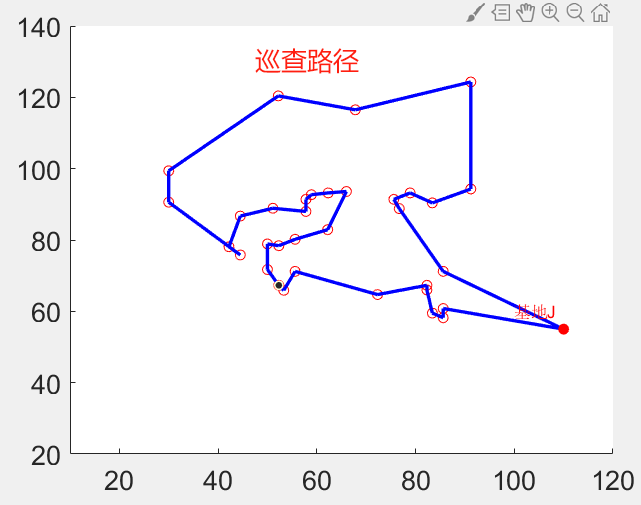
通过Matlab仿真平台对无人机巡检路径优化进行实验,实验场景为100x100的二维平面,包含多个巡检目标点。图中的结果显示了优化后的巡检路径,该路径通过多个节点,最终回到基地。实验结果证明蚁群算法在路径规划中表现出了较好的收敛性与路径优化能力。
无人机初始巡检路径与蚁群算法优化后的路径进行对比,优化后的路径显著缩短。 实验还分析了不同蚂蚁数量和信息素参数对算法性能的影响,得出蚂蚁数量在合理范围内对优化结果影响较大,而信息素挥发系数较小有利于全局最优解的获得。
部分代码
以下是部分Matlab实现的蚁群算法代码,用于无人机巡检路径优化。
% 初始化参数
num_points = 20; % 巡检点数
Q = 1; % 信息素常数
alpha = 1; % 信息素重要性
beta = 2; % 启发式信息重要性
rho = 0.5; % 信息素挥发系数
num_ants = 30; % 蚂蚁数量
num_iterations = 100; % 迭代次数
% 随机生成巡检点坐标
points = 100 * rand(num_points, 2);
% 初始化信息素矩阵
pheromone = ones(num_points, num_points);
% 开始迭代
for iter = 1:num_iterations
paths = zeros(num_ants, num_points);
path_lengths = zeros(num_ants, 1);
for k = 1:num_ants
% 初始化蚂蚁位置
path = [randi(num_points)];
% 开始选择路径
for step = 2:num_points
current_point = path(end);
probabilities = (pheromone(current_point, :) .^ alpha) .* ...
(1 ./ dist(current_point, :)) .^ beta;
probabilities(path) = 0; % 禁止访问已访问过的点
probabilities = probabilities / sum(probabilities);
% 选择下一个点
next_point = find(rand < cumsum(probabilities), 1);
path = [path, next_point];
end
paths(k, :) = path;
path_lengths(k) = calculate_path_length(path, dist);
end
% 更新信息素
pheromone = (1 - rho) * pheromone;
for k = 1:num_ants
for i = 1:(num_points-1)
pheromone(paths(k, i), paths(k, i+1)) = pheromone(paths(k, i), paths(k, i+1)) + Q / path_lengths(k);
end
end
end
参考文献
❝
Dorigo, M., Maniezzo, V., & Colorni, A. (1996). Ant system: optimization by a colony of cooperating agents. IEEE Transactions on Systems, Man, and Cybernetics-Part B (Cybernetics), 26(1), 29-41.
Dorigo, M., & Gambardella, L. M. (1997). Ant colony system: A cooperative learning approach to the traveling salesman problem. IEEE Transactions on Evolutionary Computation, 1(1), 53-66.
Bonabeau, E., Dorigo, M., & Theraulaz, G. (1999). Swarm intelligence: from natural to artificial systems. Oxford university press.