VR全景摄影制作中的常见问题及解决方案
随着VR全景摄影技术的普及,越来越多的摄影师和企业开始尝试使用这种方式来展示产品、场景或服务。虽然VR全景摄影有着强大的视觉表现力和沉浸式体验,但在制作过程中也会遇到各种挑战。为了帮助大家更好地掌握VR全景摄影的制作技巧,今天给分享一些VR全景摄影中常见问题及解决方案 1. 拼接误差导致画面错位 在将多张全景照片拼接时,常出现画面不对齐的情况,例如重影、接缝明显或图像变形等,这主要是由于拍摄时相机位置不稳定、曝光不一致或者拼接软件设置错误引起的。

拼接错位示意
解决方案:
-
使用全景拍摄云台:拍摄VR全景,不论是单反拍摄或手机拍摄,都需要借助专门的720云VR全景云台,确保相机绕着镜头的光学中心(即无视差点)旋转,以减少错位现象。(该现象在越狭小的空间种越突出)

添加图片注释,不超过 140 字(可选)
-
狭小空间使用广角或鱼眼镜头:在狭小空间中或空间中颜色、装饰较为统一,无明显特征点的空间,需要使用鱼眼镜头,扩大单张拍摄范围获取更多的识别特征才能保证拼接的正确性

添加图片注释,不超过 140 字(可选)
选择合适的软件:使用专业的正版拼接软件PTGui的最新版本,能有效的减小拼接缝的产生及提高拼接效率。
添加图片注释,不超过 140 字(可选)
2. 色差和曝光不一致 全景图中不同照片之间的颜色或亮度差异明显,影响最终效果。这通常是因为相机设置、光线条件变化或者后期处理不一致导致的。 解决方案:
-
白平衡和曝光锁定:在拍摄前锁定白平衡和曝光设置,避免在拍摄过程中自动调整。

单反相机手动曝光

单反相机手动对焦
使用手机云台和手机拍摄的朋友,长按手机屏幕可以锁定曝光和对焦

添加图片注释,不超过 140 字(可选)
-
光线均匀性:尽量选择均匀光线条件下拍摄,避免强烈的光线变化,如在日出、日落时段拍摄。
-
后期统一调整:在后期处理中,通过调整曝光和色调曲线来统一不同图像的亮度和色彩。
3. 图像分辨率不足导致细节缺失 问题描述:生成的全景图分辨率不够高,导致细节模糊或失真,无法满足商业展示的需求。 解决方案:
-
提高相机分辨率:选择高分辨率的相机进行拍摄,尽量使用RAW格式保存图像,以便后期处理。

添加图片注释,不超过 140 字(可选)
-
增加拍摄张数:通过增加拍摄的照片数量来覆盖更多的视角和细节,从而在拼接后获得更高的分辨率。

添加图片注释,不超过 140 字(可选)
-
优化后期处理:使用高质量的拼接软件,并在输出设置中选择更高的分辨率选项,同时适当锐化图像以提升细节表现。
4. 互动功能缺失和系统不可靠 问题描述:在全景漫游中,互动热点设置不合理或者漫游线路设计不佳,可能会影响用户体验。例如,热点位置不明显、点击反应不灵敏、漫游顺序混乱等。 解决方案:
-
规划漫游线路:在制作前,规划好全景漫游的路线和逻辑,确保用户能够自然地浏览整个场景。
-
互动功能缺失:热点的位置和设计要符合用户的视觉习惯,尽量放置在显眼的地方,增加点击反馈的灵敏度。
-
选择可靠的漫游工具制作平台:在进行商业项目是,多个平台、工具进行多次测试,对比。根据实际应用场景选择适合自己及具有一定知名度的平台工具如720云。
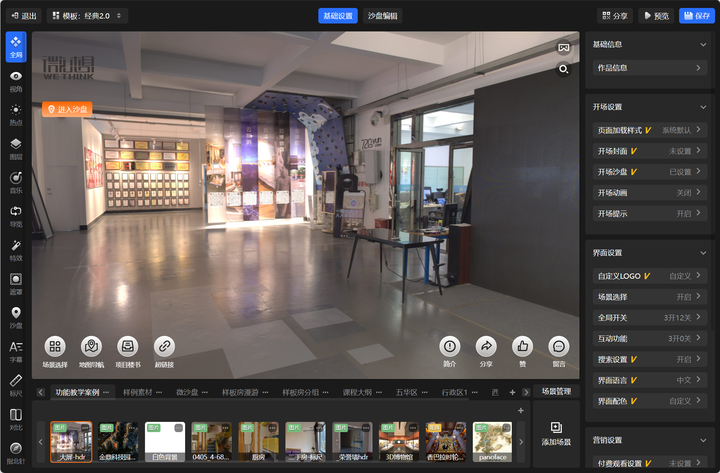
添加图片注释,不超过 140 字(可选)
6. 大像素全景图加载慢 问题描述:高分辨率的全景图像往往文件较大,导致网页或应用加载速度慢,影响用户体验。 解决方案:
-
使用大像素展示服务:图片切块技术,可以让图片根据网络情况加载适合大小、合适精度、合适大小的图片。

添加图片注释,不超过 140 字(可选)
-
切片加载:使用720云大像素分块加载技术,将全景图切分为多个小块,用户浏览时仅加载当前视角下的图像,减少初次加载时间。
-
利用CDN加速:将全景图像放置在720云CDN(内容分发网络)上,通过多个服务器分发,加快加载速度。
VR全景摄影制作虽然充满挑战,但通过合理的拍摄技巧和后期处理,可以有效解决这些常见问题,从而提升全景作品的质量和用户体验。希望上述解决方案能够为从事VR全景摄影的你提供实用的帮助,让你在制作过程中更加得心应手。