pick你的第一个人形机器人——青龙强化学习环境测试
文章目录
- 一、环境配置
- 二、开始训练
- 三、训练成果
最近感受到的大趋势是具身智能,强化学习,模仿学习做人形机器人,这个赛道很火,颇有前些年全力投入做自动驾驶的架势,正好最近用强化学习解决POMDP问题接触到了强化学习,闲逛博客发现了上海人工智能实验室青龙开源强化学习环境。正好以此来练练手,了解了解人形机器人。
一、环境配置
- 本地环境
- 系统:ubuntu22.04
- CPU: Intel® Core™ i9-14900K
- GPU: NVIDIA GeForce RTX 4090
- Docker version 26.0.0, build 2ae903e
- Driver Version: 535.171.04
- CUDA Version: 12.2
conda安装可以参考我配置pytorch环境的博客Ubuntu20.04系统配置Pytorch环境(GPU版)
1.创建虚拟环境
conda create -n AzureLoong python=3.8
2.激活虚拟环境
conda activate AzureLoong
3.安装pytorch
pip install torch==1.13.1+cu117 torchvision==0.14.1+cu117 --extra-index-url https://download.pytorch.org/whl/cu117
4.克隆源码
git clone https://atomgit.com/openloong/gymloong
5.安装Issac gym
cd ./gymloong/isaacgym/python
pip install -e .
6.测试示例
cd ./examples
python joint_monkey.py
此时有可能会报错,报错信息如下:
ImportError: libpython3.8.so.1.0: cannot open shared object file: No such file or directory
在命令行中输入以下指令
sudo find / -name libpython3.8.so.1.0
找到AzureLoong中的libpython3.8.so.1.0,如图所示
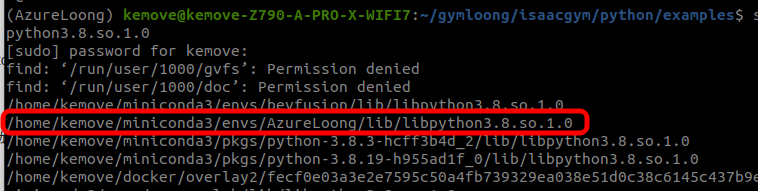
使用以下命令将其复制到/usr/lib目录下
sudo cp /home/kemove/miniconda3/envs/AzureLoong/lib/libpython3.8.so.1.0 /usr/lib/
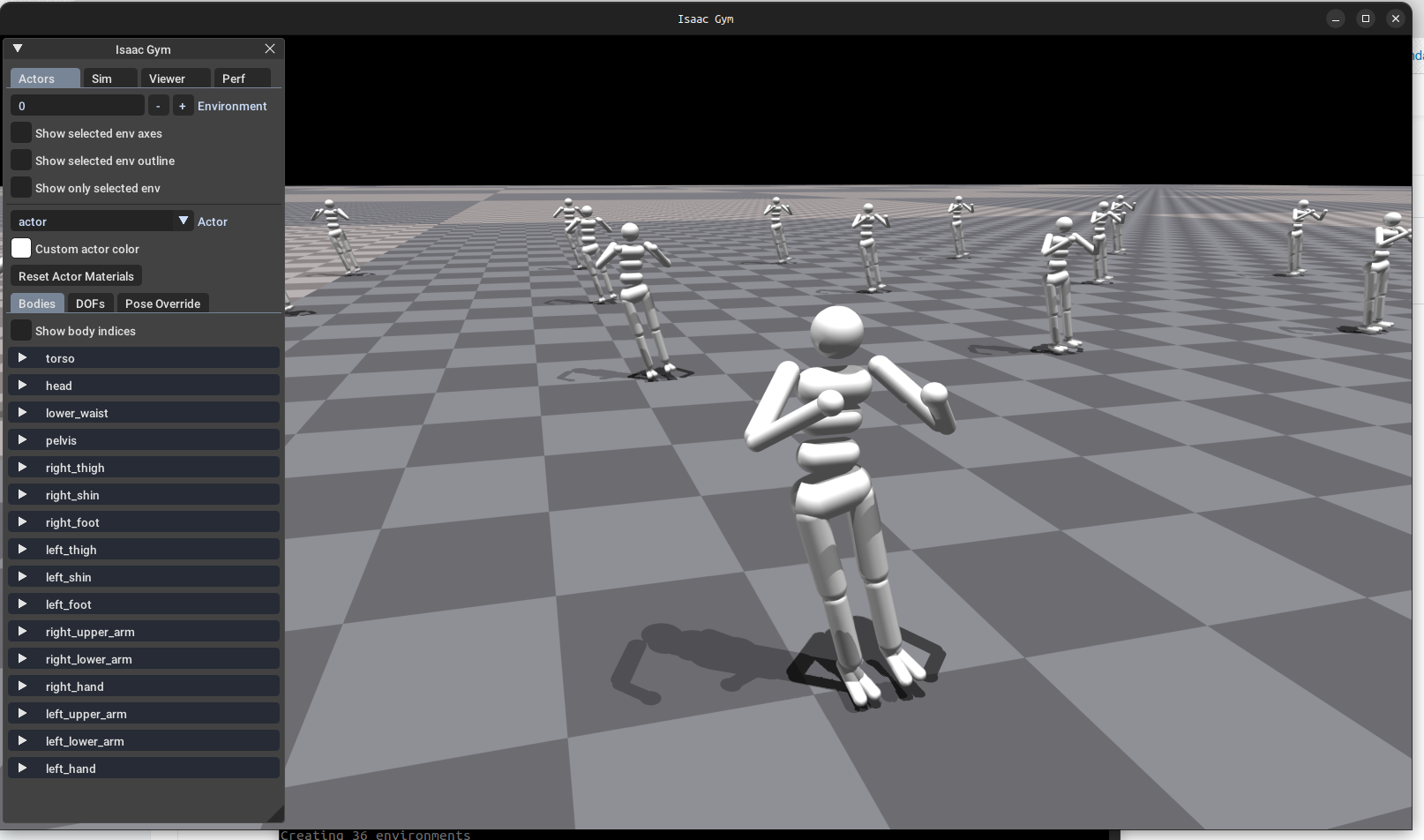
重新以下执行指令,出现以下界面说明安装成功
cd ./examples
python joint_monkey.py
7.安装gpu_rl
##注意这里使用自己的路径,我这里使用的是本地的绝对路径
cd /home/kemove/gymloong/AzureLoong/gpu_rl
pip install -e .
这里会报一个错,是setuptools版本太高了,重新安装其指定的版本,然后重新执行安装gpu_rl的指令即可
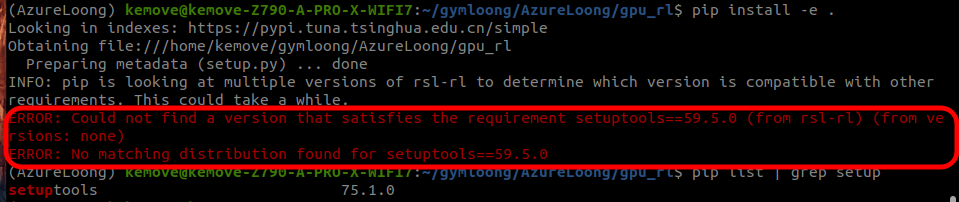
##安装指定版本
pip install setuptools==59.5.0
##重新安装gpu_rl
pip install -e .
8.安装gpuGym
##注意这里使用自己的路径,我这里使用的是本地的绝对路径
cd /home/kemove/gymloong/AzureLoong
pip install -e .
9.安装WandB
pip install wandb
二、开始训练
1.进入到训练脚本所在的路径
##注意这里使用自己的路径,我这里使用的是本地的绝对路径
cd /home/kemove/gymloong/AzureLoong/gpugym/scripts
2.执行以下指令开始训练
python train.py --task=AzureLoong
训练正常开始会弹出以下画面,按V暂停可视化,命令行中显示了每轮训练中奖励的平均数值
三、训练成果
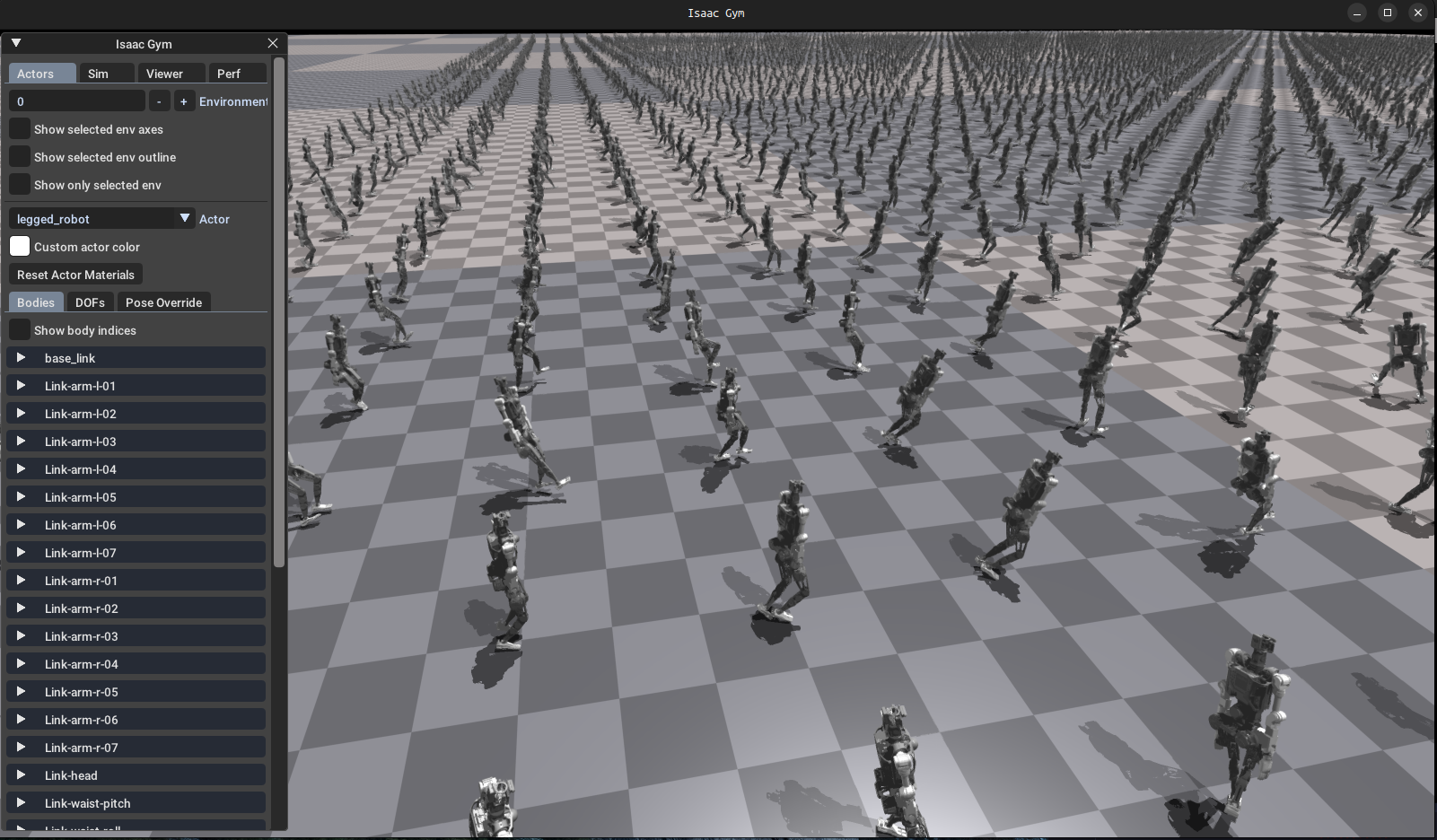
训练结束后,输入以下指令展示训练的结果
python play.py --task=AzureLoong
训练结果如下图所示,图中的小点点是一个个小机器人,它们跑到了四面八方,目前我还不理解这结果能说明什么,等以后再研究吧
目前只是跑通了训练的demo,该框架的研究以后再补坑,先研究决策规划去了。