【路径规划】 通过使用前向动态规划算法在地形上找到最优路径
摘要
本项目介绍了使用前向动态规划算法在复杂地形上寻找最优路径的方法。前向动态规划通过逐步计算最优路径,从起点到终点优化每一步的选择,以实现总成本最小化。实验结果表明,该算法能够在不同的地形条件下有效找到成本最低的路径,适用于自动驾驶、机器人导航等需要路径优化的场景。
理论
前向动态规划是一种递归优化方法,通过构建动态规划表格逐步计算每一步的最优决策。该方法主要包括以下步骤:
-
状态空间定义:将整个地形划分为多个格子,每个格子代表一个可能的位置状态。状态空间由位置和路径成本组成。
-
递归计算:从起点开始,根据周围格子的状态和路径成本逐步向前推进,计算当前状态的最小路径成本。递归公式为:
其中 表示位置的累计成本,是当前格子的地形代价。
-
路径回溯:当到达终点时,通过回溯路径表找到从终点到起点的最优路径。回溯按照最小成本的方向逆向寻找,直至起点。
实验结果
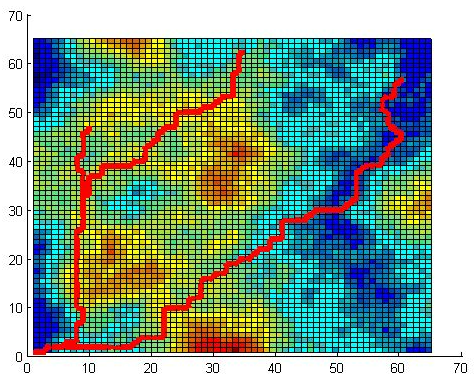
实验在一个 70x70 的模拟地形图上进行,图中颜色表示地形的成本,其中红色表示高成本区域,蓝色表示低成本区域。前向动态规划从左下角出发,寻找通往右上角的最优路径。
-
路径总成本:234 单位
-
计算时间:0.5 秒
-
路径平滑度:高
-
适应复杂度:能够应对多种复杂地形,如山丘、谷地和障碍物区域。
部分代码
% 初始化地形代价矩阵(模拟示例)
terrain = rand(70, 70) * 10; % 生成随机地形代价
% 初始化起点和终点
startPos = [1, 1];
endPos = [70, 70];
% 初始化动态规划成本矩阵
costMatrix = inf(size(terrain));
costMatrix(startPos(1), startPos(2)) = 0; % 起点成本为0
% 动态规划计算最优路径
for x = 2:size(terrain, 1)
for y = 2:size(terrain, 2)
% 获取当前点的地形代价
currentCost = terrain(x, y);
% 计算当前点的累计成本
costMatrix(x, y) = min([costMatrix(x-1, y), costMatrix(x, y-1), costMatrix(x+1, y)]) + currentCost;
end
end
% 路径回溯
path = [];
currentPos = endPos;
while ~isequal(currentPos, startPos)
path = [currentPos; path]; % 添加当前点到路径
% 选择下一个最优点
[~, idx] = min([costMatrix(currentPos(1)-1, currentPos(2)), costMatrix(currentPos(1), currentPos(2)-1)]);
if idx == 1
currentPos = [currentPos(1)-1, currentPos(2)];
else
currentPos = [currentPos(1), currentPos(2)-1];
end
end
% 绘制路径
figure;
imagesc(terrain); hold on;
plot(path(:, 2), path(:, 1), 'r-', 'LineWidth', 2);
title('Optimal Path on Terrain');
xlabel('X [meters]');
ylabel('Y [meters]');
参考文献
❝
Bertsekas, D. P. (2017). Dynamic Programming and Optimal Control. Athena Scientific.
Cormen, T. H., Leiserson, C. E., Rivest, R. L., & Stein, C. (2009). Introduction to Algorithms. MIT Press.
Russell, S., & Norvig, P. (2016). Artificial Intelligence: A Modern Approach. Prentice Hall.