劳易测ODT3CL1-2M漫反射传感器荣获 “2024 MM《现代制造》创新产品奖”
2024年9月23日,由MM《现代制造》杂志主办的“2024(第十九届)MM·新自动化论坛暨MM AWARD 智能创新系列评选”在上海成功举办,来自国内自动化领域的权威专家,知名企业代表和行业用户代表等进行了充分的交流。颁奖典礼上,劳易测ODT3CL1-2M激光漫反射传感器荣获 “2024 MM AWARD 创新产品奖”。


此次评选活动历时2个月,所有申报和提名由专家和媒体评选组严格评审,并通过线上全媒体传播平台进行网络投票,最后由组织评审委员会进行综合评审。劳易测ODT3CL1-2M漫反射传感器采用飞行时间(TOF)技术,具有背景抑制功能,是集开关和测量于一体的实用解决方案。检测距离可达两米,适用于内部物流中需要跨越长距离的多种应用,其出色的功能获得了评审团的一致认可。

劳易测大客户经理任谦先生代表公司上台领奖
劳易测ODT 3CL系列具有很好的检测性能,能够非常可靠的检测亮色、深色以及高反光的物体。检测距离可达2米,在量程范围内对目标物体的颜色检测不敏感,检测距离稳定输出。
ODT3CL1漫反射传感器应用分享
穿梭车占位检测
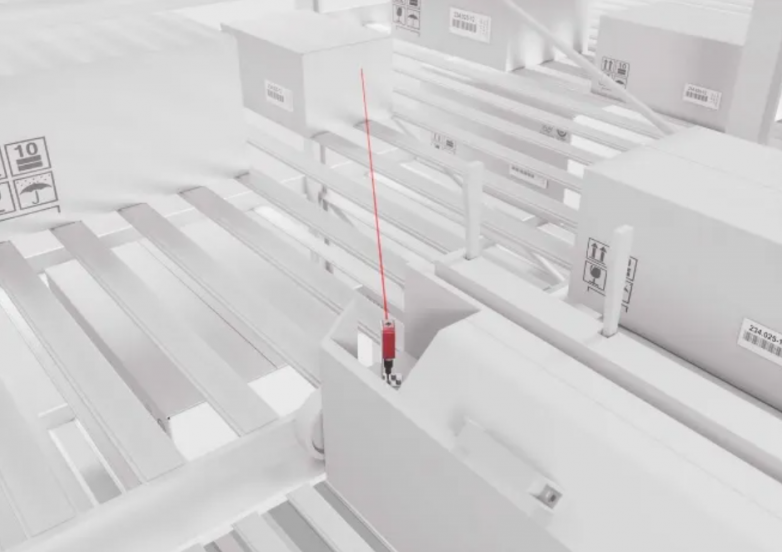
要求:在存放中转箱或纸箱之前,必须检查空间是否空闲。这需要对多深位的货架进行占位检测,同时需要满足穿梭车上的狭窄的安装环境。
解决方案:ODT 3CL1凭借其紧凑的外型设计,几乎能够满足各种穿梭车的安装需求。集成两个独立的开关输出,可实现2米的检测范围,解决了多深位占位检测的应用。它能够可靠地检测物体,即使是面对复杂颜色的物体也能应对自如。
机器人单元:从料盒中抓取车身零件
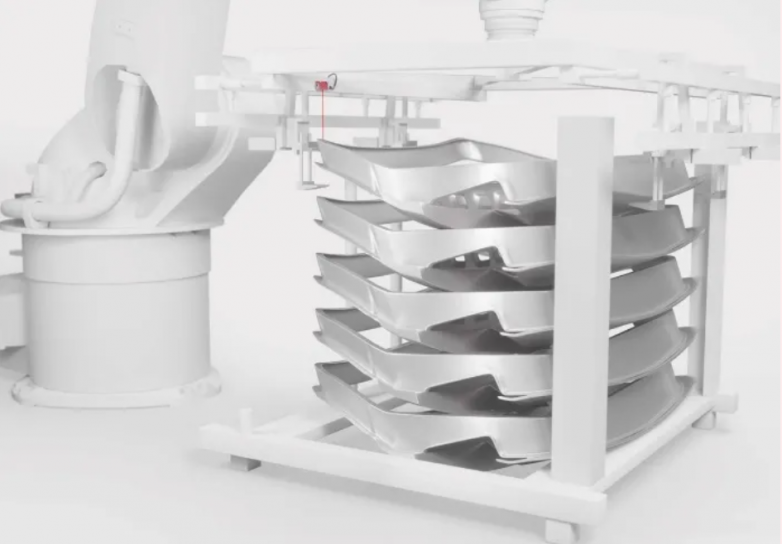
要求:在汽车工业中,机器人手臂需要从料盒中精准地抓取车身部件。为确保操作的准确性和效率,必须对料盒中不同的表面和填充水平进行精确的检测。
解决方案:ODT 3CL1漫反射传感器带有背景抑制和 TOF 技术,有两个独立的开关点,用于控制料盒上方机器人手臂的速度和移动,再根据测量数据来准确控制料盒的填充水平。此外,小巧外壳尺寸使其能够直接集成到机器人手臂的抓取元件中,增强了其实用性和便利性。
包装机进料器
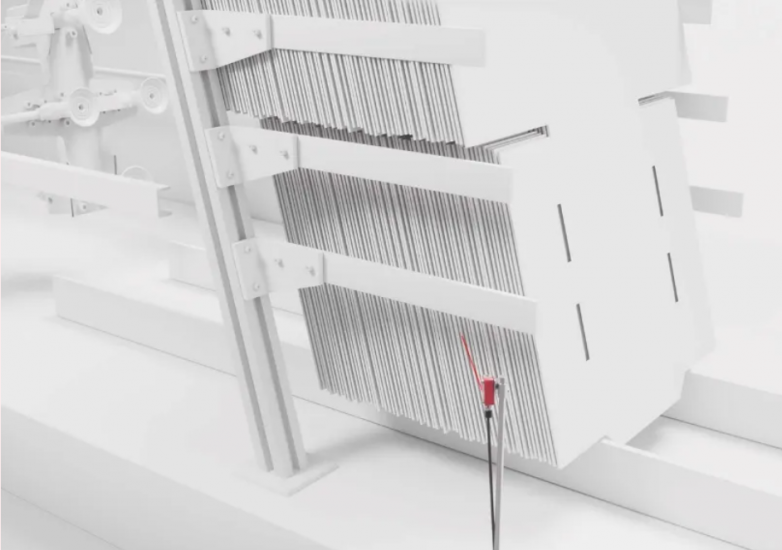
要求:需要连续检测包装机上包装材料的填充水平,并在需要重新填充包装材料时触发提醒。
解决方案:ODT 3CL1能够通过两个独立的开关输出检测两个定义的填充水平或设置窗口模式,通过IO-Link的测量值,它还能提供当前填充量的信息。

关于劳易测Leuze:
您身边的传感器专家
60年来,劳易测的团队凭借求知欲与决心,在工业自动化领域打造了一座座创新与技术的里程碑。他们的前进动力,源于客户的成功与肯定。昨天,今天,明天,始终如一。
劳易测旗下产品组合包括众多用于自动化技术的各类传感器,包括开关与测量传感器、识别系统、数据传输和图像处理系统等传感器解决方案。劳易测还拥有一支专业且具有丰富经验的安全专家团队,专注于机械安全产品、服务及配套解决方案。劳易测聚焦于物流、汽车、实验室自动化、包装、机床、锂电、光伏、轨道交通、电子等核心领域,由此积累了大量深入、具体的应用知识与研发经验。
劳易测成立于 1963 年,其总部位于德国南部的 Owen/Teck。如今,劳易测在全世界拥有超过 1,600 名员工,他们正以强大的决心和热情积极推动着进步与变革,帮助客户在瞬息万变的市场中获得长期成功。劳易测在全球设置了数个技术能力中心,此外还有共计 21 家销售子公司和超过 40 个国际销售合作伙伴。
更多信息,欢迎访问劳易测Leuze中国官方网站:www.leuze.com.cn
服务热线:4009308626