李沐深度学习-多层感知机、模型选择、过拟合、欠拟合
3.8.1 隐藏层
多层感知机在单层神经网络的基础上引入了一到多个隐藏层(hidden layer)。隐藏层位于输入层和输出层之间。图3.3展示了一个多层感知机的神经网络图,它含有一个隐藏层,该层中有5个隐藏单元。

图3.3 带有隐藏层的多层感知机
在图3.3所示的多层感知机中,输入和输出个数分别为4和3,中间的隐藏层中包含了5个隐藏单元(hidden unit)。由于输入层不涉及计算,图3.3中的多层感知机的层数为2。由图3.3可见,隐藏层中的神经元和输入层中各个输入完全连接,输出层中的神经元和隐藏层中的各个神经元也完全连接。因此,多层感知机中的隐藏层和输出层都是全连接层。
3.8.2 激活函数
一般来说,有了激活函数,就不可能再将我们的多层感知机退化成线性模型
上述问题的根源在于全连接层只是对数据做仿射变换(一种带有偏置项的线性变换),而多个仿射变换的叠加仍然是一个仿射变换。
解决问题的一个方法是引入非线性变换,例如对隐藏变量使用按元素运算的非线性函数进行变换,然后再作为下一个全连接层的输入。这个非线性函数被称为激活函数(activation function)。下面我们介绍几个常用的激活函数。
ps:softmax回归的模型架构通过单个仿射变换将我们的输入直接映射到输出,然后进行softmax操作
3.8.2.1 ReLU函数
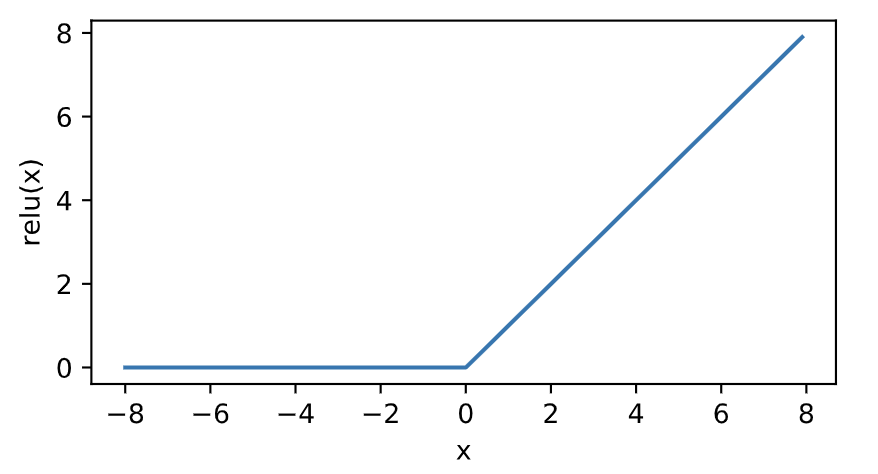
ReLU(rectified linear unit)函数提供了一个很简单的非线性变换。给定元素$x$,该函数定义为
ReLU(x)=max(x,0).
可以看出,ReLU函数只保留正数元素,并将负数元素清零。
x = torch.arange(-8.0, 8.0, 0.1, requires_grad=True) y = torch.relu(x) d2l.plot(x.detach(), y.detach(), 'x', 'relu(x)', figsize=(5, 2.5))
显然,当输入为负数时,ReLU函数的导数为0;当输入为正数时,ReLU函数的导数为1。尽管输入为0时ReLU函数不可导,但是我们可以取此处的导数为0。下面绘制ReLU函数的导数。
y.backward(torch.ones_like(x), retain_graph=True) d2l.plot(x.detach(), x.grad, 'x', 'grad of relu', figsize=(5, 2.5))

3.8.2.2 sigmoid函数
[对于一个定义域在ℝR中的输入, sigmoid函数将输入变换为区间(0, 1)上的输出]。
下面绘制了sigmoid函数。当输入接近0时,sigmoid函数接近线性变换。
y = torch.sigmoid(x) d2l.plot(x.detach(), y.detach(), 'x', 'sigmoid(x)', figsize=(5, 2.5))

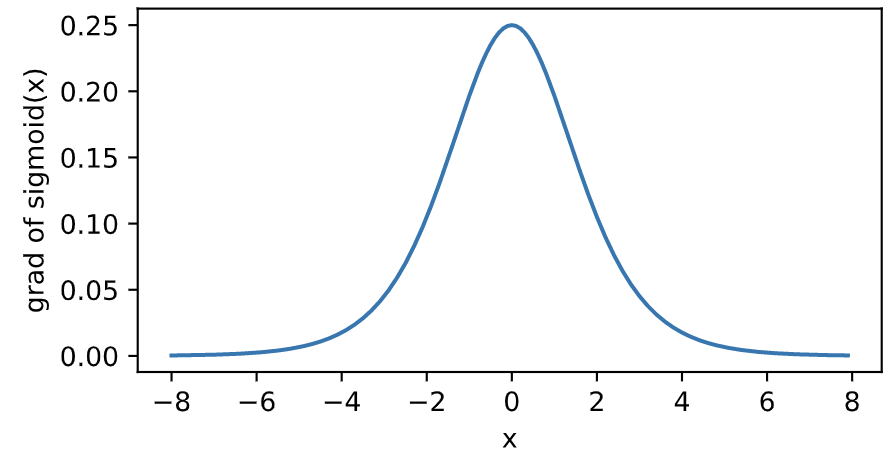
依据链式法则,sigmoid函数的导数
sigmoid′(x)=sigmoid(x)(1−sigmoid(x)).
下面绘制了sigmoid函数的导数。当输入为0时,sigmoid函数的导数达到最大值0.25;当输入越偏离0时,sigmoid函数的导数越接近0。
# 清除以前的梯度 x.grad.data.zero_() y.backward(torch.ones_like(x),retain_graph=True) d2l.plot(x.detach(), x.grad, 'x', 'grad of sigmoid', figsize=(5, 2.5))
3.8.2.3 tanh函数
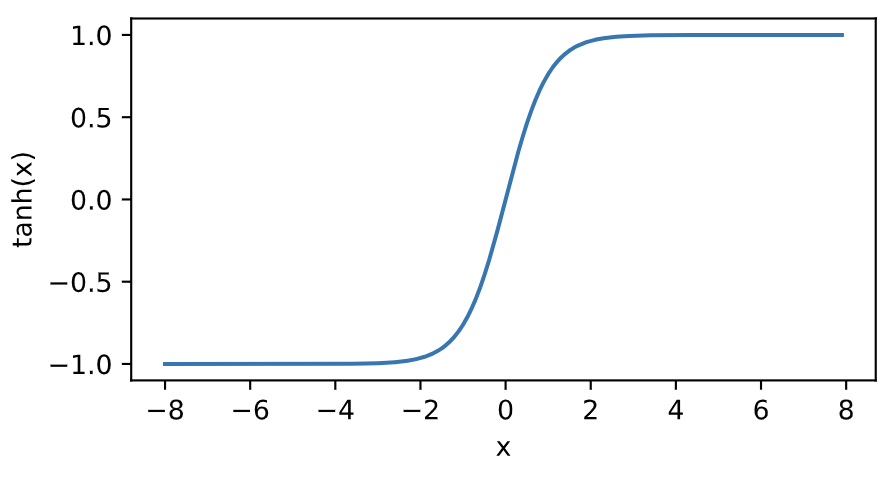
[tanh(双曲正切)函数也能将其输入压缩转换到区间(-1, 1)上]。
我们接着绘制tanh函数。当输入接近0时,tanh函数接近线性变换。虽然该函数的形状和sigmoid函数的形状很像,但tanh函数在坐标系的原点上对称。
y = torch.tanh(x) d2l.plot(x.detach(), y.detach(), 'x', 'tanh(x)', figsize=(5, 2.5))
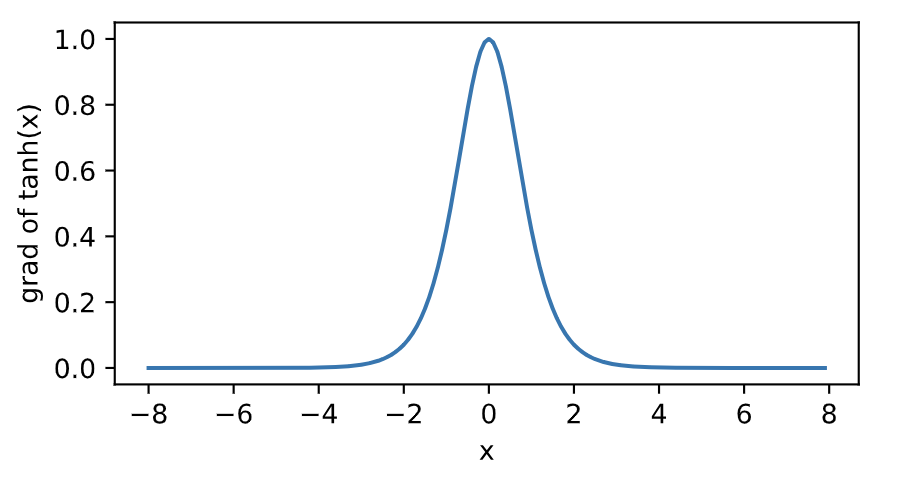
依据链式法则,tanh函数的导数
tanh′(x)=1−tanh2(x).
下面绘制了tanh函数的导数。当输入为0时,tanh函数的导数达到最大值1;当输入越偏离0时,tanh函数的导数越接近0。
# 清除以前的梯度 x.grad.data.zero_() y.backward(torch.ones_like(x),retain_graph=True) d2l.plot(x.detach(), x.grad, 'x', 'grad of tanh', figsize=(5, 2.5))
3.8.3 多层感知机
多层感知机就是含有至少一个隐藏层的由全连接层组成的神经网络,且每个隐藏层的输出通过激活函数进行变换。多层感知机的层数和各隐藏层中隐藏单元个数都是超参数。
在回归问题中,我们将输出层的输出个数设为1,并将输出直接提供给线性回归中使用的平方损失函数。
小结
- 多层感知机在输出层与输入层之间加入了一个或多个全连接隐藏层,并通过激活函数对隐藏层输出进行变换。
- 常用的激活函数包括ReLU函数、sigmoid函数和tanh函数。
3.10 多层感知机的简洁实现
import torch
from torch import nn
from d2l import torch as d2l
3.10.1 定义模型
和softmax回归唯一的不同在于,添加了2个全连接层。 第一层是[隐藏层],它(包含256个隐藏单元,并使用了ReLU激活函数)。 第二层是输出层。
net = nn.Sequential(nn.Flatten(), nn.Linear(784, 256), nn.ReLU(), nn.Linear(256, 10)) def init_weights(m): if type(m) == nn.Linear: nn.init.normal_(m.weight, std=0.01) net.apply(init_weights);
3.10.2 读取数据并训练模型
[训练过程]的实现与我们实现softmax回归时完全相同, 这种模块化设计使我们能够将与模型架构有关的内容独立出来。
batch_size, lr, num_epochs = 256, 0.1, 10 loss = nn.CrossEntropyLoss() trainer = torch.optim.SGD(net.parameters(), lr=lr) train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size) d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)
1.2 小结
- 我们可以使用高级API更简洁地实现多层感知机。
- 对于相同的分类问题,多层感知机的实现与softmax回归的实现相同,只是多层感知机的实现里增加了带有激活函数的隐藏层。
3.11 模型选择、欠拟合和过拟合
如果你改变过实验中的模型结构或者超参数,你也许发现了:当模型在训练数据集上更准确时,它在测试数据集上却不一定更准确。这是为什么呢?
3.11.1 训练误差和泛化误差
训练误差(training error):模型在训练数据集上表现出的误差
泛化误差(generalization error):模型在任意一个测试数据样本上表现出的误差的期望,并常常通过测试数据集上的误差来近似。
计算训练误差和泛化误差可以使用线性回归用到的平方损失函数和softmax回归用到的交叉熵损失函数。
让我们以高考为例来直观地解释训练误差和泛化误差这两个概念。训练误差可以认为是做往年高考试题(训练题)时的错误率,泛化误差则可以通过真正参加高考(测试题)时的答题错误率来近似。假设训练题和测试题都随机采样于一个未知的依照相同考纲的巨大试题库。如果让一名未学习中学知识的小学生去答题,那么测试题和训练题的答题错误率可能很相近。但如果换成一名反复练习训练题的高三备考生答题,即使在训练题上做到了错误率为0,也不代表真实的高考成绩会如此。
模型的参数是通过在训练数据集上训练模型而学习出的,参数的选择依据了最小化训练误差(高三备考生)。所以,训练误差的期望小于或等于泛化误差。
由于无法从训练误差估计泛化误差,一味地降低训练误差并不意味着泛化误差一定会降低。
机器学习模型应关注降低泛化误差。
3.11.2 模型选择
在机器学习中,通常需要评估若干候选模型的表现并从中选择模型。这一过程称为模型选择(model selection)。
可供选择的候选模型可以是有着不同超参数的同类模型。
以多层感知机为例,我们可以选择隐藏层的个数,以及每个隐藏层中隐藏单元个数和激活函数。为了得到有效的模型,我们通常要在模型选择上下一番功夫。下面,我们来描述模型选择中经常使用的验证数据集(validation data set)。
3.11.2.1 验证数据集
从严格意义上讲,测试集只能在所有超参数和模型参数选定后使用一次。不可以使用测试数据选择模型,如调参。
我们可以从给定的训练集中随机选取一小部分作为验证集,而将剩余部分作为真正的训练集。
3.11.2.3 K折交叉验证
通过对𝐾次实验的结果取平均来估计训练和验证误差。

3.11.3 欠拟合和过拟合
接下来,我们将探究模型训练中经常出现的两类典型问题:
欠拟合 :模型无法得到较低的训练误差的现象;
过拟合 :模型的训练误差远小于它在测试数据集上的误差的现象。
3.11.3.1 模型复杂度
高阶多项式函数模型参数更多,模型函数的选择空间更大,所以高阶多项式函数比低阶多项式函数的复杂度更高。因此,高阶多项式函数比低阶多项式函数更容易在相同的训练数据集上得到更低的训练误差。
给定训练数据集,如果模型的复杂度过低,很容易出现欠拟合;如果模型复杂度过高,很容易出现过拟合。

图3.4 模型复杂度对欠拟合和过拟合的影响
3.11.3.2 训练数据集大小
一般来说,如果训练数据集中样本数过少,过拟合更容易发生。
此外,泛化误差不会随训练数据集里样本数量增加而增大。
3.11.4 多项式函数拟合实验
我们现在可以(通过多项式拟合来探索这些概念)。
import math import numpy as np import torch from torch import nn from d2l import torch as d2l
3.11.4.1 生成数据集
[使用以下三阶多项式来生成训练和测试数据的标签:]
其中噪声项ϵ服从均值为0、标准差为0.1的正态分布。训练数据集和测试数据集的样本数都设为100。
max_degree = 20 # 多项式的最大阶数 n_train, n_test = 100, 100 # 训练和测试数据集大小 true_w = np.zeros(max_degree) # 分配大量的空间 true_w[0:4] = np.array([5, 1.2, -3.4, 5.6]) features = np.random.normal(size=(n_train + n_test, 1)) np.random.shuffle(features) poly_features = np.power(features, np.arange(max_degree).reshape(1, -1)) for i in range(max_degree): poly_features[:, i] /= math.gamma(i + 1) # gamma(n)=(n-1)! # labels的维度:(n_train+n_test,) labels = np.dot(poly_features, true_w) labels += np.random.normal(scale=0.1, size=labels.shape)
看一看生成的数据集的前两个样本。第一个值是与偏置相对应的常量特征。
# NumPy ndarray转换为tensor true_w, features, poly_features, labels = [torch.tensor(x, dtype= torch.float32) for x in [true_w, features, poly_features, labels]] features[:2], poly_features[:2, :], labels[:2]
3.11.4.2 定义、训练和测试模型
[实现一个函数来评估模型在给定数据集上的损失]。
def evaluate_loss(net, data_iter, loss): #@save """评估给定数据集上模型的损失""" metric = d2l.Accumulator(2) # 损失的总和,样本数量 for X, y in data_iter: out = net(X) y = y.reshape(out.shape) l = loss(out, y) metric.add(l.sum(), l.numel()) return metric[0] / metric[1]
[定义训练函数]。
def train(train_features, test_features, train_labels, test_labels,
num_epochs=400):
loss = nn.MSELoss()
input_shape = train_features.shape[-1]
# 不设置偏置,因为我们已经在多项式中实现了它
net = nn.Sequential(nn.Linear(input_shape, 1, bias=False))
batch_size = min(10, train_labels.shape[0])
train_iter = d2l.load_array((train_features, train_labels.reshape(-1,1)),
batch_size)
test_iter = d2l.load_array((test_features, test_labels.reshape(-1,1)),
batch_size, is_train=False)
trainer = torch.optim.SGD(net.parameters(), lr=0.01)
animator = d2l.Animator(xlabel='epoch', ylabel='loss', yscale='log',
xlim=[1, num_epochs], ylim=[1e-3, 1e2],
legend=['train', 'test'])
for epoch in range(num_epochs):
d2l.train_epoch_ch3(net, train_iter, loss, trainer)
if epoch == 0 or (epoch + 1) % 20 == 0:
animator.add(epoch + 1, (evaluate_loss(net, train_iter, loss),
evaluate_loss(net, test_iter, loss)))
print('weight:', net[0].weight.data.numpy())
3.11.4.3 三阶多项式函数拟合(正常)
我们先使用与数据生成函数同阶的三阶多项式函数拟合。实验表明,这个模型的训练误差和在测试数据集的误差都较低。训练出的模型参数也接近真实值:𝑤=[5,1.2,−3.4,5.6]w=[5,1.2,−3.4,5.6]。
# 从多项式特征中选择前4个维度,即1,x,x^2/2!,x^3/3! train(poly_features[:n_train, :4], poly_features[n_train:, :4], labels[:n_train], labels[n_train:])

3.11.4.4 线性函数拟合(欠拟合)
欠拟合(该模型的训练误差在迭代早期下降后便很难继续降低。在完成最后一次迭代周期后,训练误差依旧很高。)非线性模型容易出现欠拟合。
# 从多项式特征中选择前2个维度,即1和x train(poly_features[:n_train, :2], poly_features[n_train:, :2], labels[:n_train], labels[n_train:])

3.11.4.5 训练样本不足(过拟合)
# 过拟合(训练误差较低,测试误差很高。样本数量太少,模型显得过于复杂,容易被训练数据中的噪声影响)。
# 从多项式特征中选取所有维度 train(poly_features[:n_train, :], poly_features[n_train:, :], labels[:n_train], labels[n_train:], num_epochs=1500)

小结
- 由于无法从训练误差估计泛化误差,一味地降低训练误差并不意味着泛化误差一定会降低。机器学习模型应关注降低泛化误差。
- 可以使用验证数据集来进行模型选择。
- 欠拟合指模型无法得到较低的训练误差,过拟合指模型的训练误差远小于它在测试数据集上的误差。
- 应选择复杂度合适的模型并避免使用过少的训练样本。