微分几何-曲线论(向量函数)
文章目录
- 向量函数
- 定义
- 极限
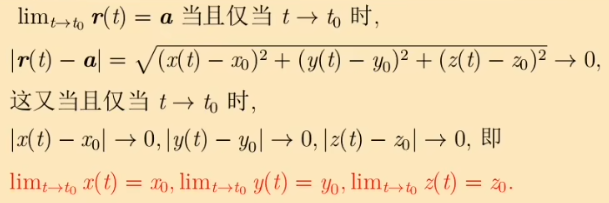
- 定理1(向量函数极限与其实函数分量极限关系)
- 定理2(向量函数极限运算法则)
- 连续性
- 定理3(向量函数连续性与其实函数分量连续性关系)
- 可导性
- 定理4(向量函数可导性与其实函数分量可导性关系)
- 定理4推论
- 定理5(向量函数导数运算法则)
- 定理6(向量函数的泰勒公式)
- 定理7(向量函数复合实函数导数)
- 积分
- 定理8(积分相关命题)
- 旋转速度
- 其他定理
- 定理10:可导向量函数有固定长当且仅当它与其导数在每一点处都正交
- 定理11:可导向量函数有固定方向当且仅当 r ( t ) × r ′ ( t ) = 0 \boldsymbol{r}(t) \times \boldsymbol{r}^{\prime}(t)=\mathbf{0} r(t)×r′(t)=0
- 定理12:向量函数 r ( t ) \boldsymbol{r}(t) r(t)平行于固定平面当且仅当 ( r ( t ) , r ′ ( t ) , r ′ ′ ( t ) ) = 0 \left(\boldsymbol{r}(t), \boldsymbol{r}^{\prime}(t), \boldsymbol{r}^{\prime \prime}(t)\right)=0 (r(t),r′(t),r′′(t))=0
向量函数
定义
设 D D D是一个集合,如果映射 r \boldsymbol r r将 D D D中每一元素都映射为 R R R中的一个位置向量,则称 r \boldsymbol r r为一个向量函数.
特别地,当 D D D为开区间 ( a , b ) (a,b) (a,b)时,向量函数 r \boldsymbol r r称为一元向量函数,记为 r ( t ) \boldsymbol r(t) r(t),或 r = r ( t ) \boldsymbol r=\boldsymbol r(t) r=r(t).
当 D D D为开区域 ( a , b ) × ( c , d ) (a, b)×(c,d) (a,b)×(c,d)时,向量函数 r \boldsymbol r r称为二元向量函数,记为 r ( u , v ) \boldsymbol r(u, v) r(u,v),或 r = r ( u , v ) \boldsymbol r=\boldsymbol r(u,v) r=r(u,v).
通常而言, r \boldsymbol r r映射的集合是一个由原点指向位置终点的向量集。当自变量变化时,后面我们会看到集合中向量的终点位置构成平面或空间中的曲线。
极限
设 r ( t ) r(t) r(t)是一个向量函数, a \boldsymbol a a是一个向量, t ∈ ( a , b ) t∈(a,b) t∈(a,b),如果对于 ∀ ε > 0 , ∃ δ > 0 \forall \varepsilon>0, \exists \delta>0 ∀ε>0,∃δ>0,当 ∣ t − t 0 ∣ < δ |t-t_0|<\delta ∣t−t0∣<δ时,有 ∣ r ( t ) − a ∣ < ε |\boldsymbol r(t)-\boldsymbol a|<\varepsilon ∣r(t)−a∣<ε,则称当 t → t 0 t \rightarrow t_0 t→t0时,向量函数 r ( t ) \boldsymbol r(t) r(t)的极限为 a \boldsymbol a a,记作: lim t → t 0 r ( t ) = a \lim _{t \rightarrow t_0} \boldsymbol r(t)=\boldsymbol a limt→t0r(t)=a,
或 t → t 0 t \rightarrow t_0 t→t0时, r ( t ) → a \boldsymbol r(t) \rightarrow \boldsymbol a r(t)→a,
或 t → t 0 t \rightarrow t_0 t→t0时, ∣ r ( t ) − a ∣ → 0 |\boldsymbol r(t)-\boldsymbol a| \rightarrow 0 ∣r(t)−a∣→0.
定理1(向量函数极限与其实函数分量极限关系)
设向量函数
r
(
t
)
=
{
x
(
t
)
,
y
(
t
)
,
z
(
t
)
}
\boldsymbol r(t)=\{x(t),y(t),z(t)\}
r(t)={x(t),y(t),z(t)},
a
=
x
0
,
y
0
,
z
0
\boldsymbol a={x_0,y_0,z_0}
a=x0,y0,z0,则:
lim
t
→
t
0
r
(
t
)
=
a
⇔
lim
t
→
t
0
x
(
t
)
=
x
0
,
lim
t
→
t
0
y
(
t
)
=
y
0
,
lim
t
→
t
0
z
(
t
)
=
z
0
\begin{array}{l} \lim _{t \rightarrow t_{0}} \boldsymbol{r}(t)=\boldsymbol{a} \Leftrightarrow \lim _{t \rightarrow t_{0}} x(t)=x_{0}, \lim _{t \rightarrow t_{0}} y(t)=y_{0}, \lim _{t \rightarrow t_{0}} z(t)=z_{0} \end{array}
limt→t0r(t)=a⇔limt→t0x(t)=x0,limt→t0y(t)=y0,limt→t0z(t)=z0
证明:通过向量函数极限定义证明即可。
通过定理1,后续的很多问题都可以从向量函数转化到实函数来求解,如求极限,求导等。
定理2(向量函数极限运算法则)
设
r
(
t
)
,
s
(
t
)
\boldsymbol r(t),\boldsymbol s(t)
r(t),s(t)为两个一元向量函数,
λ
(
t
)
\lambda(t)
λ(t)为一元实函数,如果
l
i
m
t
→
t
0
r
(
t
)
=
a
,
lim
t
→
t
0
s
(
t
)
=
b
,
lim
t
→
t
0
λ
(
t
)
=
m
lim _{t \rightarrow t_{0}} \boldsymbol{r}(t)=\boldsymbol{a}, \quad \lim _{t \rightarrow t_{0}} \boldsymbol{s}(t)=\boldsymbol{b}, \quad \lim _{t \rightarrow t_{0}} \lambda(t)=m
limt→t0r(t)=a,limt→t0s(t)=b,limt→t0λ(t)=m,则:
lim
t
→
t
0
(
r
(
t
)
±
s
(
t
)
)
=
a
±
b
lim
t
→
t
0
(
λ
(
t
)
r
(
t
)
)
=
m
a
lim
t
→
t
0
(
r
(
t
)
⋅
s
(
t
)
)
=
a
⋅
b
lim
t
→
t
0
(
r
(
t
)
×
s
(
t
)
)
=
a
×
b
\begin{array}{l} \lim _{t \rightarrow t_{0}}(\boldsymbol{r}(t) \pm \boldsymbol{s}(t))=\boldsymbol{a} \pm \boldsymbol{b} \\ \lim _{t \rightarrow t_{0}}(\lambda(t) \boldsymbol{r}(t))=m \boldsymbol{a} \\ \lim _{t \rightarrow t_{0}}(\boldsymbol{r}(t) \cdot \boldsymbol{s}(t))=\boldsymbol{a} \cdot \boldsymbol{b} \\ \lim _{t \rightarrow t_{0}}(\boldsymbol{r}(t) \times \boldsymbol{s}(t))=\boldsymbol{a} \times \boldsymbol{b} \end{array}
limt→t0(r(t)±s(t))=a±blimt→t0(λ(t)r(t))=malimt→t0(r(t)⋅s(t))=a⋅blimt→t0(r(t)×s(t))=a×b
连续性
设
r
(
t
)
\boldsymbol r(t)
r(t)是一个向量函数,
t
0
∈
(
a
,
b
)
t_0∈(a,b)
t0∈(a,b),如果
lim
t
→
t
0
r
(
t
)
=
r
(
t
0
)
\lim _{t \rightarrow t_{0}} \boldsymbol{r}(t)=\boldsymbol{r}\left(t_{0}\right)
t→t0limr(t)=r(t0)
则称
r
(
t
)
\boldsymbol r(t)
r(t)在
t
0
t_0
t0处连续。如果对于
∀
t
0
∈
(
a
,
b
)
\forall t_0∈(a,b)
∀t0∈(a,b),
r
(
t
)
\boldsymbol r(t)
r(t)在
t
0
t_0
t0处都连续,则称向量函数
r
(
t
)
\boldsymbol r(t)
r(t)是连续的.
定理3(向量函数连续性与其实函数分量连续性关系)
设向量函数 r ( t ) = { x ( t ) , y ( t ) , z ( t ) } \boldsymbol r(t)=\{x(t),y(t),z(t)\} r(t)={x(t),y(t),z(t)},则 r ( t ) r(t) r(t)连续当且仅当其分量函数 x ( t ) , y ( t ) , z ( t ) x(t),y(t),z(t) x(t),y(t),z(t)都连续.
证明:利用定理1.
可导性
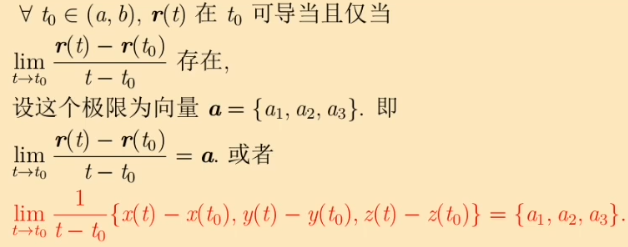
设 r ( t ) \boldsymbol r(t) r(t)是一个向量函数, t 0 ∈ ( a , b ) t_0∈(a,b) t0∈(a,b),如果 lim t → t 0 r ( t ) − r ( t 0 ) t − t 0 \lim _{t \rightarrow t_{0}} \frac{r(t)-r\left(t_{0}\right)}{t-t_{0}} limt→t0t−t0r(t)−r(t0)存在,则称 r ( t ) \boldsymbol r(t) r(t)在 t 0 t_0 t0处可导(或可微),将这个极限记作 r ′ ( t 0 ) \boldsymbol r'(t_0) r′(t0)或 d r ( t ) d t ∣ t = t 0 \left.\frac{d \boldsymbol{r}(t)}{d t}\right|_{t=t_{0}} dtdr(t) t=t0
如果对于 ∀ t 0 ∈ ( a , b ) \forall t_0∈(a,b) ∀t0∈(a,b), r ( t ) \boldsymbol r(t) r(t)在 t 0 t_0 t0处都可导,则称向量函数 r ( t ) \boldsymbol r(t) r(t)是可导的,也称向量函数 r ′ ( t ) \boldsymbol r'(t) r′(t)是 r ( t ) r(t) r(t)的导数.
定理4(向量函数可导性与其实函数分量可导性关系)
设向量函数
r
(
t
)
=
{
x
(
t
)
,
y
(
t
)
,
z
(
t
)
}
\boldsymbol r(t)=\{x(t),y(t),z(t)\}
r(t)={x(t),y(t),z(t)},则
r
(
t
)
\boldsymbol r(t)
r(t)可导当且仅当其分量函数
x
(
t
)
,
y
(
t
)
,
z
(
t
)
x(t),y(t),z(t)
x(t),y(t),z(t)都可导,即
r
′
(
t
)
=
x
′
(
t
)
,
y
′
(
t
)
,
z
′
(
t
)
r'(t)={x'(t),y'(t),z'(t)}
r′(t)=x′(t),y′(t),z′(t)
证明:

推广定义1
如果向量函数 r ( t ) \boldsymbol r(t) r(t)的导数 r ′ ( t ) \boldsymbol r'(t) r′(t)仍然存在处处连续的导数,则称向量函数 r ( t ) \boldsymbol r(t) r(t)是二阶可导的,其导数记为向量函数 r ′ ′ ( t ) \boldsymbol r''(t) r′′(t). 完全类似,还可以定义向量函数 r ( t ) \boldsymbol r(t) r(t)的三阶导数 r ′ ′ ′ ( t ) \boldsymbol r'''(t) r′′′(t),四阶导数 r ( 4 ) ( t ) \boldsymbol r^{(4)}(t) r(4)(t),直到 n n n阶导数 r ( n ) ( t ) r^{(n)}(t) r(n)(t)的概念.
推广定义2
如果一个函数具有直到 n n n阶的连续的导数,则称这个函数为 C n C^n Cn类函数. C 0 C^0 C0类函数指连续函数, C 1 C^1 C1类函数是指具有连续的一阶导数的函数, C ∞ C^{\infin} C∞函数指具有连续的任意阶导数的函数. 比如指数函数 e x e^x ex
定理4推论
向量函数
r
(
t
)
=
{
x
(
t
)
,
y
(
t
)
,
z
(
t
)
}
\boldsymbol r(t)=\{x(t),y(t),z(t)\}
r(t)={x(t),y(t),z(t)}是
C
n
C^n
Cn类函数当且仅当其分量函数为
C
n
C^n
Cn类函数,即
r
(
n
)
(
t
)
=
{
x
(
n
)
(
t
)
,
y
(
n
)
(
t
)
,
z
(
n
)
(
t
)
}
\boldsymbol{r}^{(n)}(t)=\left\{x^{(n)}(t), y^{(n)}(t), z^{(n)}(t)\right\}
r(n)(t)={x(n)(t),y(n)(t),z(n)(t)}
定理5(向量函数导数运算法则)
向量函数导数的四则运算法则如下:
(
r
±
s
)
′
=
r
′
±
s
′
(
ρ
r
)
′
=
ρ
′
r
+
ρ
r
′
(
r
⋅
s
)
′
=
r
′
⋅
s
+
r
⋅
s
′
(
r
×
s
)
′
=
r
′
×
s
+
r
×
s
′
(
r
,
s
,
u
)
′
=
(
r
,
s
,
u
)
+
(
r
,
s
′
,
u
)
+
(
r
,
s
,
u
′
)
(
r
ρ
)
′
=
r
′
ρ
−
r
ρ
′
ρ
2
\begin{array}{l} (\boldsymbol{r} \pm \boldsymbol{s})^{\prime}=\boldsymbol{r}^{\prime} \pm \boldsymbol{s}^{\prime} \\ (\rho \boldsymbol{r})^{\prime}=\rho^{\prime} \boldsymbol{r}+\rho \boldsymbol{r}^{\prime} \\ (\boldsymbol{r} \cdot \boldsymbol{s})^{\prime}=\boldsymbol{r}^{\prime} \cdot \boldsymbol{s}+\boldsymbol{r} \cdot \boldsymbol{s}^{\prime} \\ (\boldsymbol{r} \times \boldsymbol{s})^{\prime}=\boldsymbol{r}^{\prime} \times \boldsymbol{s}+\boldsymbol{r} \times \boldsymbol{s}^{\prime} \\ (\boldsymbol{r}, \boldsymbol{s}, \boldsymbol{u})^{\prime}=(\boldsymbol{r}, \boldsymbol{s}, \boldsymbol{u})+\left(\boldsymbol{r}, \boldsymbol{s}^{\prime}, \boldsymbol{u}\right)+\left(\boldsymbol{r}, \boldsymbol{s}, \boldsymbol{u}^{\prime}\right) \\ \left(\frac{\boldsymbol{r}}{\rho}\right)^{\prime}=\frac{\boldsymbol{r}^{\prime} \rho-\boldsymbol{r} \rho^{\prime}}{\rho^{2}} \end{array}
(r±s)′=r′±s′(ρr)′=ρ′r+ρr′(r⋅s)′=r′⋅s+r⋅s′(r×s)′=r′×s+r×s′(r,s,u)′=(r,s,u)+(r,s′,u)+(r,s,u′)(ρr)′=ρ2r′ρ−rρ′
注:
ρ
\rho
ρ是实函数,第五个公式是三个向量的混合积。混合积表达式为:
(
a
,
b
,
c
)
=
(
b
,
c
,
a
)
=
(
c
,
a
,
b
)
=
−
(
b
,
a
,
c
)
=
−
(
a
,
c
,
b
)
=
−
(
c
,
b
,
a
)
=
(
a
×
b
)
⋅
c
=
a
×
(
b
⋅
c
)
(\boldsymbol a,\boldsymbol b,\boldsymbol c)=(\boldsymbol b,\boldsymbol c,\boldsymbol a)=(\boldsymbol c,\boldsymbol a,\boldsymbol b)=-(\boldsymbol b,\boldsymbol a,\boldsymbol c)=-(\boldsymbol a,\boldsymbol c,\boldsymbol b)=-(\boldsymbol c,\boldsymbol b,\boldsymbol a)=(\boldsymbol a \times \boldsymbol b)\cdot \boldsymbol c=\boldsymbol a \times (\boldsymbol b\cdot \boldsymbol c)
(a,b,c)=(b,c,a)=(c,a,b)=−(b,a,c)=−(a,c,b)=−(c,b,a)=(a×b)⋅c=a×(b⋅c)
混合积的集合意义表示以
a
,
b
,
c
a,b,c
a,b,c为棱的平行六面体的体积.
定理6(向量函数的泰勒公式)
设向量函数
r
(
t
)
\boldsymbol r(t)
r(t)在点
t
0
t_0
t0处具有直到
n
n
n阶的连续的导数,则:
r
(
t
)
=
r
(
t
0
)
+
r
′
(
t
0
)
(
t
−
t
0
)
+
1
2
!
r
′
′
(
t
0
)
(
t
−
t
0
)
2
+
⋯
+
1
n
!
r
(
n
)
(
t
0
)
(
t
−
t
0
)
n
+
o
(
(
t
−
t
0
)
n
)
\begin{array}{l} \boldsymbol{r}(t)=\boldsymbol{r}\left(t_{0}\right)+\boldsymbol{r}^{\prime}\left(t_{0}\right)\left(t-t_{0}\right)+\frac{1}{2!} \boldsymbol{r}^{\prime \prime}\left(t_{0}\right)\left(t-t_{0}\right)^{2} \\ +\cdots+\frac{1}{n!} \boldsymbol{r}^{(n)}\left(t_{0}\right)\left(t-t_{0}\right)^{n}+\boldsymbol{o}\left(\left(t-t_{0}\right)^{n}\right) \end{array}
r(t)=r(t0)+r′(t0)(t−t0)+2!1r′′(t0)(t−t0)2+⋯+n!1r(n)(t0)(t−t0)n+o((t−t0)n)
这里
o
(
(
t
−
t
0
)
n
)
\boldsymbol{o}\left(\left(t-t_{0}\right)^{n}\right)
o((t−t0)n)表示
(
t
−
t
0
)
n
(t-t_0)^n
(t−t0)n的高阶无穷小向量.
定理7(向量函数复合实函数导数)
设
r
(
u
)
\boldsymbol r(u)
r(u)是一个可导的向量函数,
u
=
g
(
t
)
u=g(t)
u=g(t)是一个可导的实函数,那么它们的复合函数
r
(
g
(
t
)
)
\boldsymbol r(g(t))
r(g(t))(如果复合函数存在的话)可导,且:
d
r
d
t
=
d
r
d
u
d
g
d
t
或者
r
′
(
u
)
g
′
(
t
)
\frac{d \boldsymbol{r}}{d t}=\frac{d \boldsymbol{r}}{d u} \frac{d g}{d t} \quad \text { 或者 } \quad \boldsymbol{r}^{\prime}(u) g^{\prime}(t)
dtdr=dudrdtdg 或者 r′(u)g′(t)
积分
向量函数的积分的定义和实函数的情形相同,即:
∫
a
b
r
(
t
)
d
t
=
lim
n
→
∞
∑
i
=
1
n
r
(
ξ
i
)
(
t
i
−
t
i
−
1
)
\int_{a}^{b} \boldsymbol{r}(t) d t=\lim _{n \rightarrow \infty} \sum_{i=1}^{n} \boldsymbol{r}\left(\xi_{i}\right)\left(t_{i}-t_{i-1}\right)
∫abr(t)dt=n→∞limi=1∑nr(ξi)(ti−ti−1)
其中
t
0
=
a
,
t
1
,
⋯
,
t
n
−
1
,
t
n
=
b
t_{0}=a, t_{1}, \cdots, t_{n-1}, t_{n}=b
t0=a,t1,⋯,tn−1,tn=b表示区间
[
a
,
b
]
[a,b]
[a,b]的分点,
ξ
i
\xi_i
ξi是区间
(
t
i
−
1
,
t
i
)
(t_{i-1},t_i)
(ti−1,ti)上任意一点,当
n
→
∞
n\rightarrow \infin
n→∞时,
∣
t
i
−
t
i
−
1
∣
→
0
|t_i-t_{i-1}|\rightarrow0
∣ti−ti−1∣→0
如果向量函数
r
(
t
)
=
x
(
t
)
e
1
+
y
(
t
)
e
2
+
z
(
t
)
e
3
\boldsymbol{r}(t)=x(t) \boldsymbol{e}_{1}+y(t) \boldsymbol{e}_{2}+z(t) \boldsymbol{e}_{3}
r(t)=x(t)e1+y(t)e2+z(t)e3是可积的,则有:
∫
a
b
r
(
t
)
d
t
=
∫
a
b
[
x
(
t
)
e
1
+
y
(
t
)
e
2
+
z
(
t
)
e
3
]
d
t
=
∫
a
b
x
(
t
)
d
t
e
1
+
∫
a
b
y
(
t
)
d
t
e
2
+
∫
a
b
z
(
t
)
d
t
e
3
\begin{array}{l} \int_{a}^{b} \boldsymbol{r}(t) d t=\int_{a}^{b}\left[x(t) \boldsymbol{e}_{1}+y(t) \boldsymbol{e}_{2}+z(t) \boldsymbol{e}_{3}\right] d t \\ =\int_{a}^{b} x(t) d t \boldsymbol{e}_{1}+\int_{a}^{b} y(t) d t e_{2}+\int_{a}^{b} z(t) d t \boldsymbol{e}_{3} \end{array}
∫abr(t)dt=∫ab[x(t)e1+y(t)e2+z(t)e3]dt=∫abx(t)dte1+∫aby(t)dte2+∫abz(t)dte3
关于向量函数积分有以下命题.
定理8(积分相关命题)
如果向量函数 r ( t ) \boldsymbol{r}(t) r(t)是区间 [ a , b ] [a,b] [a,b]上的连续函数,则积分 ∫ a b r ( t ) d t \int_{a}^{b} \boldsymbol{r}(t) d t ∫abr(t)dt存在,并且
(1)
a
<
c
<
b
a<c<b
a<c<b时,有
∫
a
b
r
(
t
)
d
t
=
∫
a
c
r
(
t
)
d
t
+
∫
c
b
r
(
t
)
d
t
.
\int_{a}^{b} \boldsymbol{r}(t) d t=\int_{a}^{c} \boldsymbol{r}(t) d t+\int_{c}^{b} \boldsymbol{r}(t) d t .
∫abr(t)dt=∫acr(t)dt+∫cbr(t)dt.
(2)设
m
m
m是常数,有
∫
a
b
m
r
(
t
)
d
t
=
m
∫
a
b
r
(
t
)
d
t
.
\int_{a}^{b} m \boldsymbol{r}(t) d t=m \int_{a}^{b} \boldsymbol{r}(t) d t .
∫abmr(t)dt=m∫abr(t)dt.
(3)设
m
\boldsymbol m
m是常向量,则有
∫
a
b
m
⋅
r
(
t
)
d
t
=
m
⋅
∫
a
b
r
(
t
)
d
t
,
∫
a
b
m
×
r
(
t
)
d
t
=
m
×
∫
a
b
r
(
t
)
d
t
.
\begin{array}{l} \int_{a}^{b} \boldsymbol{m} \cdot \boldsymbol{r}(t) d t=\boldsymbol{m} \cdot \int_{a}^{b} \boldsymbol{r}(t) d t, \\ \int_{a}^{b} \boldsymbol{m} \times \boldsymbol{r}(t) d t=\boldsymbol{m} \times \int_{a}^{b} \boldsymbol{r}(t) d t. \end{array}
∫abm⋅r(t)dt=m⋅∫abr(t)dt,∫abm×r(t)dt=m×∫abr(t)dt.
(4)
d
d
x
[
∫
a
x
r
(
t
)
d
t
]
=
r
(
x
)
.
\frac{d}{d x}\left[\int_{a}^{x} \boldsymbol{r}(t) d t\right]=\boldsymbol{r}(x).
dxd[∫axr(t)dt]=r(x).
旋转速度
给 t t t以增量 Δ t \Delta t Δt,用 Δ φ \Delta \varphi Δφ表示向量 r ( t ) \boldsymbol{r}(t) r(t)和 r ( t + Δ t ) \boldsymbol{r}(t+\Delta t) r(t+Δt)所组成的角,如图所示.
作比值 Δ φ Δ t \frac {\Delta \varphi} {\Delta t} ΔtΔφ,当 Δ t → 0 \Delta t \rightarrow 0 Δt→0时,则 ∣ Δ φ Δ t ∣ |\frac {\Delta \varphi} {\Delta t}| ∣ΔtΔφ∣的极限就叫做向量函数 r ( t ) \boldsymbol{r}(t) r(t)对于它的变量 t t t的旋转速度.(后面的知识可以知道其实旋转速度就是曲率)

定理9:单位向量函数 r ( t ) \boldsymbol{r}(t) r(t)( ∣ r ( t ) ∣ = 1 |\boldsymbol{r}(t)|=1 ∣r(t)∣=1)关于 t t t的旋转速度等于其微商(导数)的模 ∣ r ′ ( t ) ∣ |\boldsymbol{r'}(t)| ∣r′(t)∣
证明:

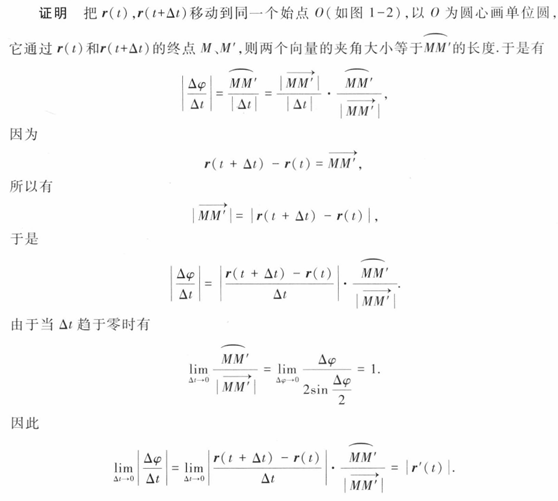
证明过程涉及到一个重要极限(后续会补充这个重要极限的证明,高数忘光了…):
lim
x
→
0
s
i
n
x
x
=
1
\lim _{x \rightarrow 0}\frac {sinx} x = 1
x→0limxsinx=1
其他定理
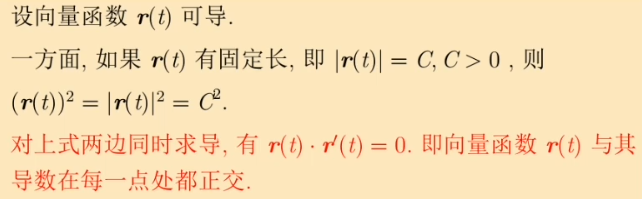
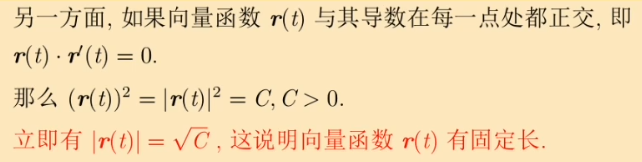
定理10:可导向量函数有固定长当且仅当它与其导数在每一点处都正交
证明:利用两边同时求导以及两边同时积分的技巧来证明.
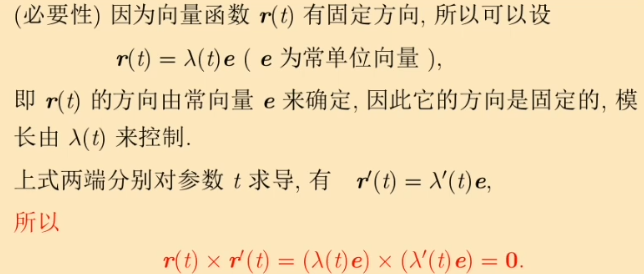
定理11:可导向量函数有固定方向当且仅当 r ( t ) × r ′ ( t ) = 0 \boldsymbol{r}(t) \times \boldsymbol{r}^{\prime}(t)=\mathbf{0} r(t)×r′(t)=0
证明:需要利用**向量叉积为0向量则两向量平行(共线)**以及上一个定理结论.


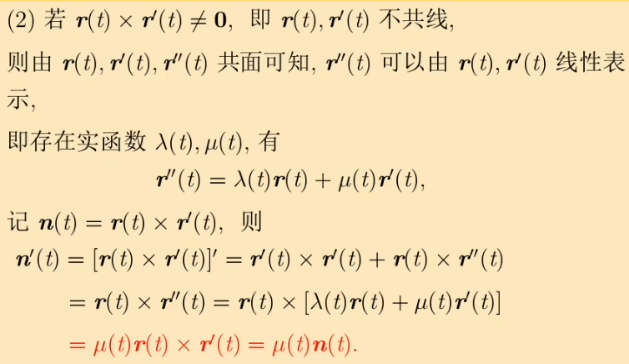
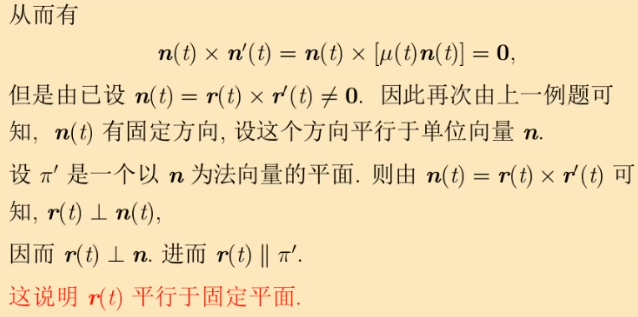
定理12:向量函数 r ( t ) \boldsymbol{r}(t) r(t)平行于固定平面当且仅当 ( r ( t ) , r ′ ( t ) , r ′ ′ ( t ) ) = 0 \left(\boldsymbol{r}(t), \boldsymbol{r}^{\prime}(t), \boldsymbol{r}^{\prime \prime}(t)\right)=0 (r(t),r′(t),r′′(t))=0
证明:用到上一个定理和平面向量基本定理