智能巡检机器人的大模型训练
随着工业自动化和智能化进程的不断加快,智能巡检机器人已成为维护和管理复杂设备的重要工具。在电力、石油化工、煤矿、数据中心等行业中,智能巡检机器人通过自主巡检、故障检测等功能,提高了设备管理的效率和安全性。大模型训练在智能巡检机器人中的应用,使其具备更强的学习能力和决策能力。
大模型的定义及分类
大模型指的是拥有数以亿计的参数的深度学习模型。这些模型能够通过复杂的神经网络结构处理海量数据,从中提取特征并进行准确的预测和分类。近年来,大模型在图像识别、自然语言处理、语音识别等多个领域取得了显著的成功,成为人工智能发展的重要趋势。
大模型主要分为视觉大模型和多模态大模型:
视觉大模型(CV):用于图像处理和分析,如图像分类、目标检测、图像分割、姿态估计、人脸识别等。例如,VIT系列(Google)、文心UFO、华为盘古CV、INTERN(商汤)等。
多模态大模型::能够处理多种不同类型数据,如文本、图像、音频等。这类模型结合了NLP和CV的能力,实现对多模态信息的综合理解和分析。例如,DingoDB多模向量数据库(九章云极DataCanvas)、DALL-E(OpenAI)、悟空画画(华为)、midjourney等。
大模型在智能巡检中的应用
智能巡检机器人需要在复杂的环境中进行自主决策与任务执行。大模型通过丰富的数据输入和强大的计算能力,使得机器人能够实时分析数据、识别异常情况,并进行自主决策。大模型的引入提高了智能巡检机器人的自主学习能力,使其能在不断变化的环境中适应新情况,提升工作效率。
数据的收集与预处理:
1. 数据来源
智能巡检机器人的有效训练依赖于高质量的数据。数据来源主要包括:
1)传感器数据:包括温度、压力、振动、湿度等多种传感器实时监测的数据,这些数据对设备的健康状况至关重要。
2)历史巡检记录:涵盖了设备故障的历史数据、维护记录、巡检报告等信息,这些数据能够帮助模型识别故障模式。
3)图像与视频数据:通过摄像头和无人机获取的图像和视频,能够提供设备的外观和状态信息,用于识别表面缺陷和异常现象。
2. 数据预处理
数据预处理是提高模型性能的关键步骤,主要包括以下几个方面:
1) 数据清洗:去除冗余、错误和不完整的数据,确保数据的质量。
2) 数据标注:对数据进行准确的标注,尤其是图像数据,确保每一幅图像中的物体和缺陷都得到正确标记。
3) 特征提取:利用统计学和机器学习技术,从原始数据中提取出有意义的特征,增强模型学习的有效性。
4) 数据增强:通过旋转、平移、缩放等方法增加图像数据的多样性,提升模型的泛化能力。
模型选择与训练:
1. 模型选择
根据不同的巡检任务,选择合适的模型是至关重要的。常见的模型包括:
1) 卷积神经网络(CNN):适合图像数据处理,广泛用于视觉任务,如设备外观检测和缺陷识别。
2) 循环神经网络(RNN):适合处理序列数据,能够有效处理传感器数据的时间序列分析。
3) 深度强化学习(DRL):用于动态环境中的决策任务,能够通过试错学习最优巡检路径。
2. 训练过程
模型训练过程通常包括以下步骤:
1) 数据划分:将数据集分为训练集、验证集和测试集,确保模型的泛化能力。
2) 训练模型:利用训练集数据对模型进行训练,采用反向传播算法优化模型参数。
3) 超参数调整:使用验证集评估模型性能,通过调整学习率、批大小等超参数优化模型。
4) 模型评估:在测试集上评估模型的最终性能,检查其准确性、召回率和F1值等指标。
应用场景
1.设备故障预测
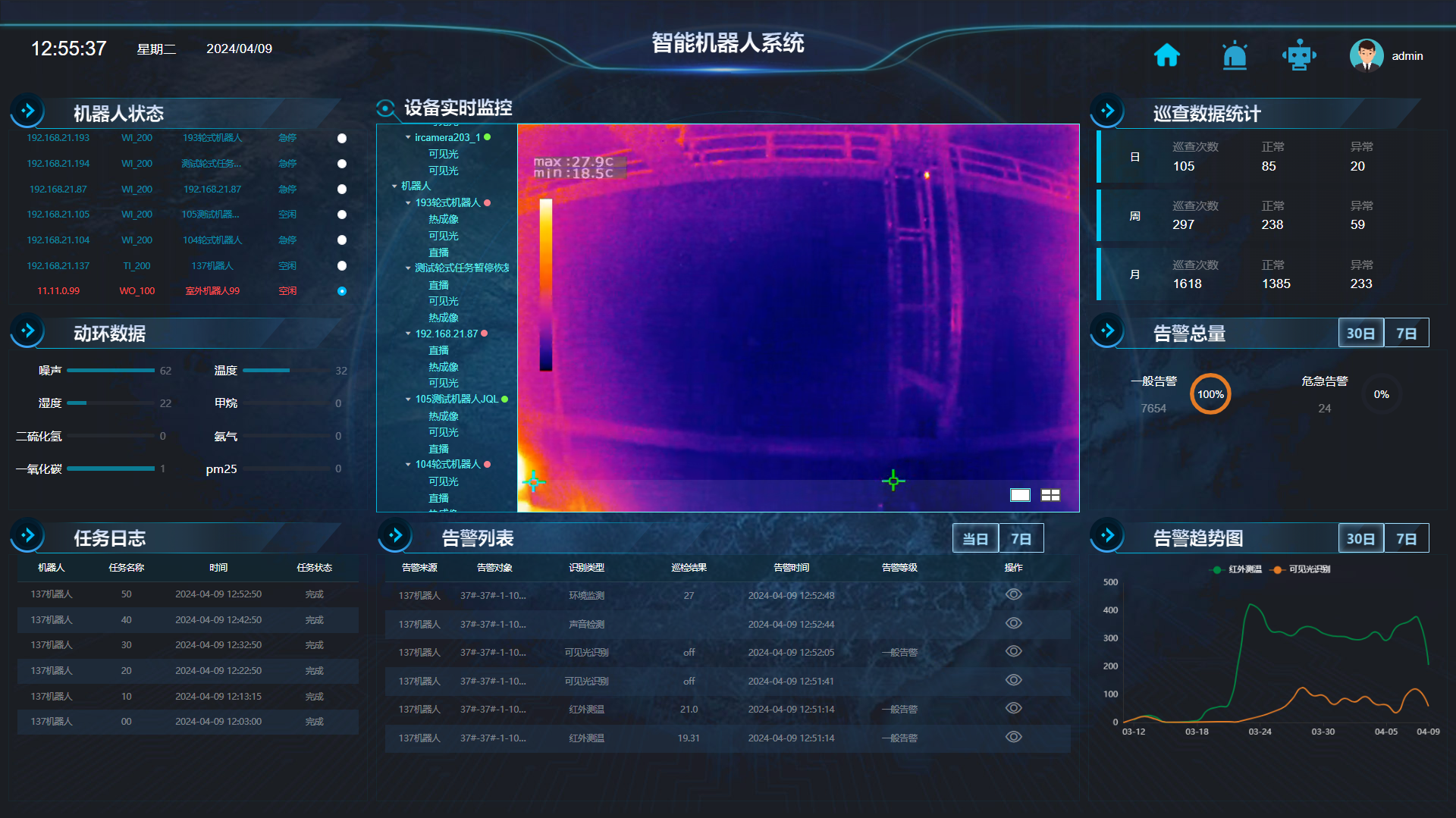
智能巡检机器人能够利用大模型分析历史数据,识别潜在的故障模式。例如,通过分析温度和振动数据,机器人可以预测电机的故障,从而实现提前维护,减少停机时间。模型能够实时监测设备状态,并在出现异常时及时发出警报,帮助运维人员做出及时反应。
2.实时图像识别
智能巡检机器人配备摄像头,能够实时捕捉设备的图像并进行分析。大模型通过训练后能够准确识别设备表面的瑕疵,如锈蚀、裂纹、泄漏等情况。实时分析的能力使得巡检效率大幅提升,同时也降低了人为错误的风险。
3. 优化巡检路径
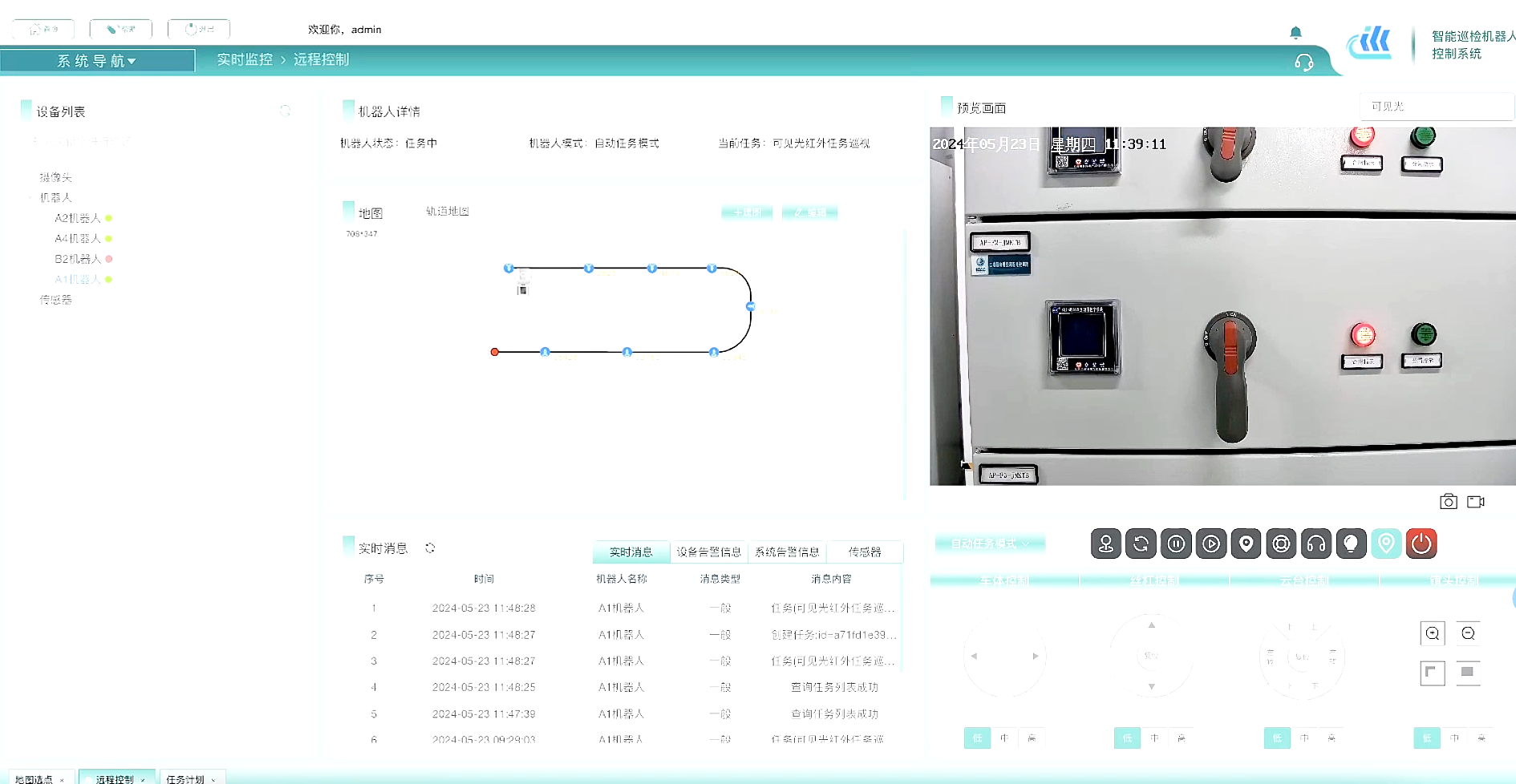
利用历史巡检数据,智能巡检机器人能够分析并优化巡检路径。这不仅提高了巡检效率,还节省了时间和资源。通过动态路径规划,机器人可以根据设备状态和环境变化,灵活调整巡检策略。
发展前景

1. 持续学习与适应
未来的智能巡检机器人将采用在线学习和增量学习方法,能够在实际应用中不断更新和优化模型。这种能力使得机器人能够快速适应新的环境和条件,提升其工作效率。
2. 跨领域应用
智能巡检机器人的技术不仅局限于电力行业,还可以扩展到石油化工、交通运输、煤矿、数据中心等多个领域。大模型的成功训练将推动跨领域的应用,提升整个行业的智能化水平。
3.人机协作
未来,智能巡检机器人将与人类操作员形成更加紧密的协作关系。通过实时数据共享和反馈,机器人能够支持人类做出更为准确的决策,同时人类的经验也能帮助机器人更好地理解复杂的环境和任务。
智能巡检机器人的大模型训练为其在各行业的应用提供了强有力的技术基础。通过有效的数据收集与预处理、模型选择与训练,智能巡检机器人能够实现高效的设备管理和故障预测。随着技术的不断进步,智能巡检机器人将在更多领域发挥重要作用,推动行业的智能化转型与发展。