【零售和消费品&存货】超市购物车商品检测系统源码&数据集全套:改进yolo11-DySnakeConv
改进yolo11-dysample等200+全套创新点大全:超市购物车商品检测系统源码&数据集全套
1.图片效果展示



项目来源 人工智能促进会 2024.10.30
注意:由于项目一直在更新迭代,上面“1.图片效果展示”和“2.视频效果展示”展示的系统图片或者视频可能为老版本,新版本在老版本的基础上升级如下:(实际效果以升级的新版本为准)
(1)适配了YOLOV11的“目标检测”模型和“实例分割”模型,通过加载相应的权重(.pt)文件即可自适应加载模型。
(2)支持“图片识别”、“视频识别”、“摄像头实时识别”三种识别模式。
(3)支持“图片识别”、“视频识别”、“摄像头实时识别”三种识别结果保存导出,解决手动导出(容易卡顿出现爆内存)存在的问题,识别完自动保存结果并导出到tempDir中。
(4)支持Web前端系统中的标题、背景图等自定义修改。
另外本项目提供训练的数据集和训练教程,暂不提供权重文件(best.pt),需要您按照教程进行训练后实现图片演示和Web前端界面演示的效果。
2.视频效果展示
2.1 视频效果展示
3.背景
研究背景与意义
随着电子商务的迅猛发展和消费者购物习惯的改变,传统超市面临着前所未有的挑战与机遇。超市购物车商品检测系统的需求日益增加,旨在提升购物体验、优化库存管理和提高运营效率。近年来,计算机视觉技术的快速进步为这一领域提供了新的解决方案,尤其是基于深度学习的目标检测算法。YOLO(You Only Look Once)系列模型因其高效的实时检测能力而受到广泛关注,尤其是在复杂的零售环境中。
本研究旨在基于改进的YOLOv11模型,构建一个高效的超市购物车商品检测系统。该系统将能够实时识别购物车中的商品,提升结账效率,减少人工干预,同时为超市提供准确的库存数据。为实现这一目标,我们使用了包含13,000张图像的特定数据集,涵盖了多种商品类别,包括糖果、谷物、清洁用品、饮料、护肤品和零食等。这些商品的多样性为模型的训练提供了丰富的样本,有助于提高检测的准确性和鲁棒性。
通过对YOLOv11模型的改进,我们期望在检测速度和精度之间取得更好的平衡,尤其是在处理超市这种动态环境下的复杂场景时。该研究不仅具有重要的理论意义,推动了目标检测技术在零售领域的应用,也具有显著的实际价值,能够为超市管理者提供决策支持,提升顾客的购物体验,最终推动零售行业的智能化转型。通过构建这一系统,我们希望为未来的智能购物环境奠定基础,助力零售行业的数字化升级。
4.数据集信息展示
4.1 本项目数据集详细数据(类别数&类别名)
nc: 10
names: [‘candy_minipralines_lindt’, ‘cereal_cheerios_honeynut’, ‘cleaning_snuggle_henkel’, ‘craft_yarn_caron_01’, ‘drink_greentea_itoen’, ‘drink_whippingcream_lucerne’, ‘lotion_essentially_nivea’, ‘pasta_lasagne_barilla’, ‘snack_biscotti_ghiott_01’, ‘snack_granolabar_naturevalley’]
该项目为【目标检测】数据集,请在【训练教程和Web端加载模型教程(第三步)】这一步的时候按照【目标检测】部分的教程来训练
4.2 本项目数据集信息介绍
本项目数据集信息介绍
本项目所使用的数据集名为“Grocery”,旨在为改进YOLOv11的超市购物车商品检测系统提供丰富的训练素材。该数据集包含10个不同类别的商品,涵盖了超市中常见的多种商品类型,以便于系统在实际应用中能够准确识别和分类。这10个类别分别为:迷你巧克力糖(candy_minipralines_lindt)、蜂蜜坚果麦片(cereal_cheerios_honeynut)、清洁剂(cleaning_snuggle_henkel)、手工纱线(craft_yarn_caron_01)、绿茶饮料(drink_greentea_itoen)、鲜奶油饮料(drink_whippingcream_lucerne)、护肤乳液(lotion_essentially_nivea)、千层面(pasta_lasagne_barilla)、意大利饼干(snack_biscotti_ghiott_01)以及谷物能量棒(snack_granolabar_naturevalley)。
数据集的构建过程中,特别注重商品的多样性和代表性,以确保模型在训练后能够适应不同的购物环境和商品种类。每个类别的商品都经过精心挑选,确保其在超市购物车中出现的频率较高,从而提高模型的实用性和准确性。此外,数据集中每个商品的图像均经过标注,包含了商品的边界框信息,这对于YOLOv11模型的训练至关重要。
通过使用“Grocery”数据集,研究团队期望能够提升YOLOv11在商品检测任务中的性能,使其在实际超市环境中能够更快速、准确地识别购物车中的商品。这不仅有助于提高购物效率,还能为顾客提供更好的购物体验。随着深度学习技术的不断进步,利用这样一个多样化且高质量的数据集进行训练,将为超市智能化管理和自动化购物提供坚实的基础。





5.全套项目环境部署视频教程(零基础手把手教学)
5.1 所需软件PyCharm和Anaconda安装教程(第一步)
5.2 安装Python虚拟环境创建和依赖库安装视频教程(第二步)
6.改进YOLOv11训练教程和Web_UI前端加载模型教程(零基础手把手教学)
6.1 改进YOLOv11训练教程和Web_UI前端加载模型教程(第三步)
按照上面的训练视频教程链接加载项目提供的数据集,运行train.py即可开始训练
Epoch gpu_mem box obj cls labels img_size
1/200 20.8G 0.01576 0.01955 0.007536 22 1280: 100%|██████████| 849/849 [14:42<00:00, 1.04s/it]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100%|██████████| 213/213 [01:14<00:00, 2.87it/s]
all 3395 17314 0.994 0.957 0.0957 0.0843
Epoch gpu_mem box obj cls labels img_size
2/200 20.8G 0.01578 0.01923 0.007006 22 1280: 100%|██████████| 849/849 [14:44<00:00, 1.04s/it]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100%|██████████| 213/213 [01:12<00:00, 2.95it/s]
all 3395 17314 0.996 0.956 0.0957 0.0845
Epoch gpu_mem box obj cls labels img_size
3/200 20.8G 0.01561 0.0191 0.006895 27 1280: 100%|██████████| 849/849 [10:56<00:00, 1.29it/s]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100%|███████ | 187/213 [00:52<00:00, 4.04it/s]
all 3395 17314 0.996 0.957 0.0957 0.0845
项目数据集下载链接
7.原始YOLOv11算法讲解
YOLO11介绍
Ultralytics YOLO11是一款尖端的、最先进的模型,它在之前YOLO版本成功的基础上进行了构建,并引入了新功能和改进,以进一步提升性能和灵活性。
YOLO11设计快速、准确且易于使用,使其成为各种物体检测和跟踪、实例分割、图像分类以及姿态估计任务的绝佳选择。


结构图如下:

C3k2
C3k2,结构图如下

**C3k2,继承自类C2f,其中通过c3k设置False或者Ture来决定选择使用C3k还是**Bottleneck

实现代码 ultralytics/nn/modules/block.py
C2PSA介绍
借鉴V10 PSA结构,实现了C2PSA和C2fPSA,最终选择了基于C2的C2PSA(可能涨点更好?)

实现代码 ultralytics/nn/modules/block.py
Detect介绍
分类检测头引入了DWConv(更加轻量级,为后续二次创新提供了改进点),结构图如下(和V8的区别):

8.200+种全套改进YOLOV11创新点原理讲解
8.1 200+种全套改进YOLOV11创新点原理讲解大全
由于篇幅限制,每个创新点的具体原理讲解就不全部展开,具体见下列网址中的改进模块对应项目的技术原理博客网址【Blog】(创新点均为模块化搭建,原理适配YOLOv5~YOLOv11等各种版本)
改进模块技术原理博客【Blog】网址链接

8.2 精选部分改进YOLOV11创新点原理讲解
这里节选部分改进创新点展开原理讲解(完整的改进原理见上图和改进模块技术原理博客链接【如果此小节的图加载失败可以通过CSDN或者Github搜索该博客的标题访问原始博客,原始博客图片显示正常】
### 全维动态卷积ODConv
鉴于上述讨论,我们的ODConv引入了一种多维注意机制,该机制具有并行策略,用于学习卷积核在核空间的所有四个维度上的不同注意。图提供了CondConv、DyConv和ODConv的示意性比较。
ODConv的公式:根据等式1中的符号,ODConv可定义为

将注意力标量分配给整个卷积核。图2示出了将这四种类型的关注乘以n个卷积核的过程。原则上,这四种类型的关注是相互补充的,并且以位置、信道、滤波器和核的顺序将它们逐步乘以卷积核
,使得卷积运算不同w.r.t.所有空间位置、所有输入信道、所有滤波器和输入x的所有核,提供捕获丰富上下文线索的性能保证。因此,ODConv可以显著增强CNN基本卷积运算的特征提取能力。此外,具有单个卷积核的ODConv可以与标准CondConv和DyConv竞争或优于它们,为最终模型引入的额外参数大大减少。提供了大量实验来验证这些优点。通过比较等式1和等式2,我们可以清楚地看到,ODConv是一种更广义的动态卷积。此外,当设置n=1且 所有分量均为1时,只关注滤波器方向 的ODConv将减少为:将基于输入特征的SE变量应用于卷积滤波器,然后进行卷积运算(注意原始SE(Hu等人,2018b)基于输出特征,并且用于重新校准输出特征本身)。这种SE变体是ODConv的特例。
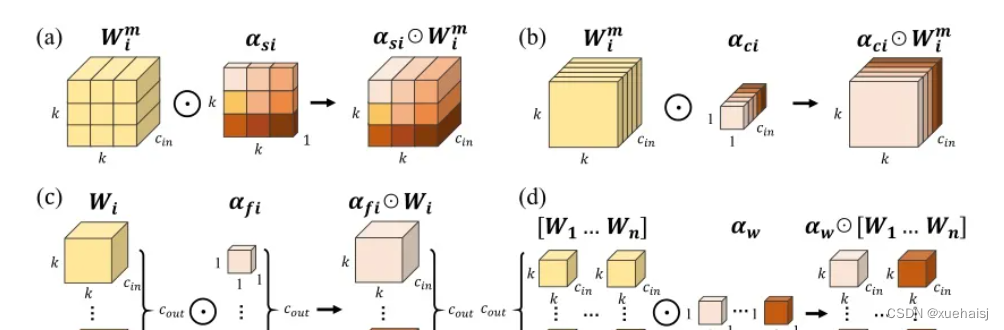
图:将ODConv中的四种注意类型逐步乘以卷积核的示例。(a) 沿空间维度的逐位置乘法运算,(b)沿输入信道维度的逐信道乘法运算、(c)沿输出信道维度的按滤波器乘法运算,以及(d)沿卷积核空间的核维度的按核乘法运算。方法部分对符号进行了说明
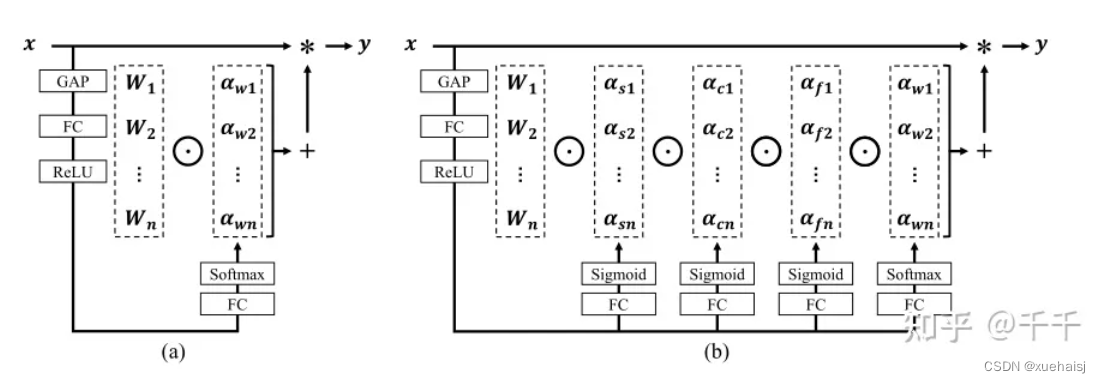
实现:对于ODConv,一个关键问题是如何计算卷积核的四种关注度 。继CondConv和DyConv之后,我们还使用SE型注意力模块(Hu等人,2018b),但将多个头部作为来计算它们,其结构如图所示。具体而言,首先通过逐通道全局平均池(GAP)运算将输入压缩到具有长度的特征向量中。随后,存在完全连接(FC)层和四个头部分支。ReLU(Krizhevsky等人,2012)位于FC层之后。FC层将压缩特征向量映射到具有缩减比的低维空间(根据消融实验,我们在所有主要实验中设置 ,避免了高模型复杂度)。对于四个头部分支,每个分支都有一个输出大小如图。
引入ODConv的改进YOLO
参考这篇博客涵盖了引入ODConv的改进YOLOv11系统的内容,ODConv采用多维注意机制,在卷积核空间的四个维度上学习不同的注意。结合了CondConv和DyConv的优势,ODConv通过图示的四种注意类型逐步与卷积核相乘,以捕获丰富的上下文线索,提升特征提取能力。
ODConv结构与方法
ODConv的公式和图示展示了其关注力分配给卷积核的方式,其中四种类型的关注以位置、信道、滤波器和核的顺序逐步与卷积核相乘。这种结构保证了卷积运算不同于标准的Conv操作,能够捕获更多上下文信息,从而增强了CNN的特征提取能力。另外,单个卷积核的ODConv在性能上能够与CondConv和DyConv相竞争,并且引入的额外参数大幅减少。
ODConv的特殊之处在于其广义的动态卷积性质,同时在特定条件下(n=1且所有分量为1),它可以退化为一种特例,即只关注滤波器方向,这类似于基于输入特征的SE变体,但不同于原始SE,它基于输出特征。
ODConv的实现
关键问题在于如何计算卷积核的四种关注度。ODConv采用了SE型注意力模块,结合了多个头部来计算这些关注度。具体实现上,通过逐通道全局平均池运算和完全连接层,将输入压缩为特征向量,随后使用四个头部分支来计算四种不同类型的关注。这样的结构能在保持模型复杂度可控的情况下,提升了特征的表征能力。
ODConv的引入为YOLOv11带来了显著的性能提升,并且通过大量实验证明了其在特征提取方面的优越性。其结合了多维注意机制和卷积操作,为目标检测和分拣系统的提升带来了新的思路和性能突破。
9.系统功能展示
图9.1.系统支持检测结果表格显示
图9.2.系统支持置信度和IOU阈值手动调节
图9.3.系统支持自定义加载权重文件best.pt(需要你通过步骤5中训练获得)
图9.4.系统支持摄像头实时识别
图9.5.系统支持图片识别
图9.6.系统支持视频识别
图9.7.系统支持识别结果文件自动保存
图9.8.系统支持Excel导出检测结果数据








10. YOLOv11核心改进源码讲解
10.1 conv.py
以下是对给定代码的核心部分进行分析和详细注释的结果:
import math
import torch
import torch.nn as nn
def autopad(k, p=None, d=1):
"""自动计算填充以保持输出形状与输入相同。"""
if d > 1:
# 如果膨胀率大于1,计算实际的卷积核大小
k = d * (k - 1) + 1 if isinstance(k, int) else [d * (x - 1) + 1 for x in k]
if p is None:
# 如果未指定填充,则使用卷积核的一半作为填充
p = k // 2 if isinstance(k, int) else [x // 2 for x in k]
return p
class Conv(nn.Module):
"""标准卷积层,包含卷积、批归一化和激活函数。"""
default_act = nn.SiLU() # 默认激活函数
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, d=1, act=True):
"""初始化卷积层,设置输入输出通道、卷积核大小、步幅、填充、分组、膨胀和激活函数。"""
super().__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p, d), groups=g, dilation=d, bias=False)
self.bn = nn.BatchNorm2d(c2) # 批归一化
self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
"""前向传播:应用卷积、批归一化和激活函数。"""
return self.act(self.bn(self.conv(x)))
class DWConv(Conv):
"""深度可分离卷积,适用于减少参数和计算量。"""
def __init__(self, c1, c2, k=1, s=1, d=1, act=True):
"""初始化深度卷积,设置输入输出通道、卷积核大小、步幅、膨胀和激活函数。"""
super().__init__(c1, c2, k, s, g=math.gcd(c1, c2), d=d, act=act)
class ConvTranspose(nn.Module):
"""转置卷积层,通常用于上采样。"""
default_act = nn.SiLU() # 默认激活函数
def __init__(self, c1, c2, k=2, s=2, p=0, bn=True, act=True):
"""初始化转置卷积层,设置输入输出通道、卷积核大小、步幅、填充、批归一化和激活函数。"""
super().__init__()
self.conv_transpose = nn.ConvTranspose2d(c1, c2, k, s, p, bias=not bn)
self.bn = nn.BatchNorm2d(c2) if bn else nn.Identity()
self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
"""前向传播:应用转置卷积、批归一化和激活函数。"""
return self.act(self.bn(self.conv_transpose(x)))
class ChannelAttention(nn.Module):
"""通道注意力模块,用于强调重要特征通道。"""
def __init__(self, channels: int) -> None:
"""初始化通道注意力模块,设置通道数。"""
super().__init__()
self.pool = nn.AdaptiveAvgPool2d(1) # 自适应平均池化
self.fc = nn.Conv2d(channels, channels, 1, 1, 0, bias=True) # 1x1卷积
self.act = nn.Sigmoid() # Sigmoid激活函数
def forward(self, x: torch.Tensor) -> torch.Tensor:
"""前向传播:计算通道注意力并应用于输入。"""
return x * self.act(self.fc(self.pool(x)))
class SpatialAttention(nn.Module):
"""空间注意力模块,用于强调重要特征区域。"""
def __init__(self, kernel_size=7):
"""初始化空间注意力模块,设置卷积核大小。"""
super().__init__()
assert kernel_size in {3, 7}, "卷积核大小必须为3或7"
padding = 3 if kernel_size == 7 else 1
self.cv1 = nn.Conv2d(2, 1, kernel_size, padding=padding, bias=False) # 卷积层
self.act = nn.Sigmoid() # Sigmoid激活函数
def forward(self, x):
"""前向传播:计算空间注意力并应用于输入。"""
return x * self.act(self.cv1(torch.cat([torch.mean(x, 1, keepdim=True), torch.max(x, 1, keepdim=True)[0]], 1)))
class CBAM(nn.Module):
"""卷积块注意力模块,结合通道和空间注意力。"""
def __init__(self, c1, kernel_size=7):
"""初始化CBAM模块,设置输入通道和卷积核大小。"""
super().__init__()
self.channel_attention = ChannelAttention(c1) # 通道注意力
self.spatial_attention = SpatialAttention(kernel_size) # 空间注意力
def forward(self, x):
"""前向传播:依次应用通道和空间注意力。"""
return self.spatial_attention(self.channel_attention(x))
代码分析总结:
- 自动填充函数 (
autopad):用于计算卷积操作的填充,以确保输出形状与输入形状一致。 - 卷积类 (
Conv):实现了标准卷积操作,包含卷积、批归一化和激活函数的组合。 - 深度卷积类 (
DWConv):继承自Conv,实现深度可分离卷积,适用于减少模型的参数量。 - 转置卷积类 (
ConvTranspose):实现转置卷积操作,通常用于上采样过程。 - 通道注意力模块 (
ChannelAttention):通过自适应平均池化和1x1卷积来强调重要的通道特征。 - 空间注意力模块 (
SpatialAttention):通过卷积操作和激活函数来强调重要的空间特征。 - CBAM模块 (
CBAM):结合通道和空间注意力的特性,提升特征表示能力。
这些核心部分构成了YOLO模型中的重要组件,用于特征提取和增强。
这个文件 conv.py 定义了一系列用于卷积操作的模块,主要是为深度学习模型(如 YOLO)提供不同类型的卷积层。文件中包含了多个类,每个类实现了特定的卷积操作或功能。
首先,文件导入了必要的库,包括 math、numpy 和 torch,并定义了 __all__ 变量,列出了该模块中可导出的类和函数。
接下来,定义了一个辅助函数 autopad,用于根据卷积核的大小、填充和扩张参数自动计算填充量,以确保输出的形状与输入相同。
然后,定义了多个卷积相关的类:
-
Conv 类实现了标准的卷积操作,包含卷积层、批归一化层和激活函数。构造函数接受多个参数,如输入通道数、输出通道数、卷积核大小、步幅、填充、分组数、扩张率和激活函数。
forward方法将输入数据依次通过卷积、批归一化和激活函数处理。 -
Conv2 类是对
Conv类的简化,增加了一个 1x1 的卷积层,并在forward方法中将两个卷积的输出相加。 -
LightConv 类实现了一种轻量级卷积,包含两个卷积层:一个 1x1 的卷积和一个深度卷积(
DWConv)。 -
DWConv 类实现了深度卷积,主要用于减少参数数量和计算量。
-
DSConv 类实现了深度可分离卷积,由一个深度卷积和一个逐点卷积组成。
-
DWConvTranspose2d 类是深度转置卷积的实现,继承自
nn.ConvTranspose2d。 -
ConvTranspose 类实现了转置卷积层,包含批归一化和激活函数。
-
Focus 类用于将空间信息聚焦到通道维度,输入的张量被分成四个部分并进行拼接,然后通过卷积处理。
-
GhostConv 类实现了 Ghost 卷积,通过主卷积和廉价操作实现高效特征学习。
-
RepConv 类实现了一种可重用的卷积模块,支持训练和推理阶段的不同操作。
-
ChannelAttention 和 SpatialAttention 类实现了通道注意力和空间注意力机制,分别用于增强特征图的通道和空间信息。
-
CBAM 类结合了通道注意力和空间注意力,形成一个完整的卷积块注意力模块。
-
Concat 类用于在指定维度上连接多个张量。
这些类和方法的设计旨在提高卷积操作的灵活性和效率,使得在构建深度学习模型时能够根据需求选择合适的卷积层。整体来看,这个文件为构建高效的卷积神经网络提供了丰富的基础组件。
10.2 rmt.py
以下是经过简化和注释的核心代码部分,保留了主要的类和功能,同时添加了详细的中文注释:
import torch
import torch.nn as nn
import torch.nn.functional as F
class DWConv2d(nn.Module):
""" 深度可分离卷积类 """
def __init__(self, dim, kernel_size, stride, padding):
super().__init__()
# 使用分组卷积实现深度可分离卷积
self.conv = nn.Conv2d(dim, dim, kernel_size, stride, padding, groups=dim)
def forward(self, x: torch.Tensor):
'''
x: 输入张量,形状为 (b, h, w, c)
'''
x = x.permute(0, 3, 1, 2) # 转换为 (b, c, h, w)
x = self.conv(x) # 进行卷积操作
x = x.permute(0, 2, 3, 1) # 转换回 (b, h, w, c)
return x
class MaSA(nn.Module):
""" 多头自注意力机制类 """
def __init__(self, embed_dim, num_heads, value_factor=1):
super().__init__()
self.factor = value_factor
self.embed_dim = embed_dim
self.num_heads = num_heads
self.head_dim = self.embed_dim * self.factor // num_heads
self.key_dim = self.embed_dim // num_heads
self.scaling = self.key_dim ** -0.5
# 定义线性变换层
self.q_proj = nn.Linear(embed_dim, embed_dim, bias=True)
self.k_proj = nn.Linear(embed_dim, embed_dim, bias=True)
self.v_proj = nn.Linear(embed_dim, embed_dim * self.factor, bias=True)
self.lepe = DWConv2d(embed_dim, 5, 1, 2) # 深度可分离卷积用于位置编码
self.out_proj = nn.Linear(embed_dim * self.factor, embed_dim, bias=True)
def forward(self, x: torch.Tensor, rel_pos):
'''
x: 输入张量,形状为 (b, h, w, c)
rel_pos: 位置关系张量
'''
bsz, h, w, _ = x.size()
q = self.q_proj(x) # 计算查询
k = self.k_proj(x) # 计算键
v = self.v_proj(x) # 计算值
lepe = self.lepe(v) # 位置编码
k *= self.scaling # 缩放键
# 重新排列张量以适应多头注意力
qr = q.view(bsz, h, w, self.num_heads, -1).permute(0, 3, 1, 2, 4)
kr = k.view(bsz, h, w, self.num_heads, -1).permute(0, 3, 1, 2, 4)
# 计算注意力权重
qk_mat = torch.matmul(qr, kr.transpose(-1, -2)) + rel_pos # 添加位置关系
qk_mat = torch.softmax(qk_mat, -1) # 归一化
# 计算输出
output = torch.matmul(qk_mat, v.view(bsz, h, w, self.num_heads, -1).permute(0, 3, 1, 2, 4))
output = output.permute(0, 3, 1, 2, 4).flatten(-2, -1) + lepe # 添加位置编码
output = self.out_proj(output) # 线性变换输出
return output
class FeedForwardNetwork(nn.Module):
""" 前馈神经网络类 """
def __init__(self, embed_dim, ffn_dim, activation_fn=F.gelu, dropout=0.0):
super().__init__()
self.fc1 = nn.Linear(embed_dim, ffn_dim) # 第一层线性变换
self.fc2 = nn.Linear(ffn_dim, embed_dim) # 第二层线性变换
self.dropout = nn.Dropout(dropout) # dropout层
self.activation_fn = activation_fn # 激活函数
def forward(self, x: torch.Tensor):
'''
x: 输入张量,形状为 (b, h, w, c)
'''
x = self.fc1(x) # 第一层
x = self.activation_fn(x) # 激活
x = self.dropout(x) # dropout
x = self.fc2(x) # 第二层
return x
class VisRetNet(nn.Module):
""" 视觉回归网络类 """
def __init__(self, in_chans=3, num_classes=1000, embed_dims=[96, 192, 384, 768], depths=[2, 2, 6, 2], num_heads=[3, 6, 12, 24]):
super().__init__()
self.patch_embed = PatchEmbed(in_chans=in_chans, embed_dim=embed_dims[0]) # 图像分块嵌入
self.layers = nn.ModuleList() # 存储各层
# 构建各层
for i_layer in range(len(depths)):
layer = BasicLayer(embed_dim=embed_dims[i_layer], depth=depths[i_layer], num_heads=num_heads[i_layer])
self.layers.append(layer)
def forward(self, x):
x = self.patch_embed(x) # 进行图像分块嵌入
for layer in self.layers:
x = layer(x) # 逐层前向传播
return x
# 定义模型构造函数
def RMT_T():
model = VisRetNet(
embed_dims=[64, 128, 256, 512],
depths=[2, 2, 8, 2],
num_heads=[4, 4, 8, 16]
)
return model
if __name__ == '__main__':
model = RMT_T() # 创建模型
inputs = torch.randn((1, 3, 640, 640)) # 随机输入
res = model(inputs) # 前向传播
print(res.size()) # 输出结果的形状
代码说明:
- DWConv2d:实现了深度可分离卷积,用于处理输入张量。
- MaSA:实现了多头自注意力机制,计算查询、键、值并进行注意力加权。
- FeedForwardNetwork:实现了前馈神经网络,包含两层线性变换和激活函数。
- VisRetNet:构建了一个视觉回归网络,包含图像分块嵌入和多个基本层。
- RMT_T:模型构造函数,创建一个小型的视觉回归网络实例。
此代码为一个简化的视觉回归网络的实现,适合用于理解和扩展深度学习模型的结构。
这个程序文件 rmt.py 实现了一个基于视觉变换器(Vision Transformer)的网络模型,名为 VisRetNet,并提供了不同规模的模型构造函数(如 RMT_T, RMT_S, RMT_B, RMT_L)。该模型主要用于处理图像数据,具有图像嵌入、块结构、注意力机制等特性。
首先,文件中导入了必要的库,包括 PyTorch 和一些自定义的层和模块。接着定义了一些基础组件,例如 DWConv2d(深度可分离卷积)、RelPos2d(二维相对位置编码)、MaSAd 和 MaSA(多头自注意力机制的变体)等。这些组件是构建模型的基础,负责处理输入数据的不同方面。
DWConv2d 类实现了深度可分离卷积,主要用于降低计算复杂度。RelPos2d 类则用于生成相对位置编码,这在处理图像时能够帮助模型更好地理解空间关系。MaSAd 和 MaSA 类实现了不同形式的自注意力机制,前者支持分块处理,后者则处理整个输入。
接下来,FeedForwardNetwork 类实现了前馈神经网络,通常用于在注意力层之后进行特征变换。RetBlock 类则是一个包含注意力机制和前馈网络的基本块,支持层归一化和残差连接。
PatchMerging 类用于将输入特征图分割成多个小块,并进行合并,以便在模型的不同层之间传递信息。BasicLayer 类则构建了一个基本的变换器层,包含多个 RetBlock 组件,并在必要时进行下采样。
LayerNorm2d 和 PatchEmbed 类分别实现了二维层归一化和图像到补丁的嵌入过程,后者将输入图像转换为嵌入特征。
VisRetNet 类是整个模型的核心,负责构建整个网络结构。它包含多个层,每一层由多个块组成,并支持不同的超参数配置,如嵌入维度、深度、头数等。模型的前向传播过程包括图像补丁嵌入、经过各层的处理以及特征提取。
最后,文件提供了四个不同规模的模型构造函数(RMT_T, RMT_S, RMT_B, RMT_L),这些函数根据不同的参数设置创建不同规模的 VisRetNet 模型。程序的最后部分是一个测试示例,创建了一个小型模型并对随机输入进行了前向传播,输出每个特征图的尺寸。
总体来说,这个文件实现了一个复杂的视觉变换器模型,结合了多种先进的深度学习技术,适用于图像处理任务。
10.3 lsknet.py
以下是经过简化并添加详细中文注释的核心代码部分:
import torch
import torch.nn as nn
from functools import partial
class Mlp(nn.Module):
""" 多层感知机(MLP)模块 """
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features # 输出特征数
hidden_features = hidden_features or in_features # 隐藏层特征数
self.fc1 = nn.Conv2d(in_features, hidden_features, 1) # 第一层卷积
self.dwconv = DWConv(hidden_features) # 深度卷积
self.act = act_layer() # 激活函数
self.fc2 = nn.Conv2d(hidden_features, out_features, 1) # 第二层卷积
self.drop = nn.Dropout(drop) # Dropout层
def forward(self, x):
""" 前向传播 """
x = self.fc1(x)
x = self.dwconv(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
class Attention(nn.Module):
""" 注意力模块 """
def __init__(self, d_model):
super().__init__()
self.proj_1 = nn.Conv2d(d_model, d_model, 1) # 线性投影
self.activation = nn.GELU() # 激活函数
self.spatial_gating_unit = LSKblock(d_model) # 空间门控单元
self.proj_2 = nn.Conv2d(d_model, d_model, 1) # 线性投影
def forward(self, x):
""" 前向传播 """
shortcut = x.clone() # 残差连接
x = self.proj_1(x)
x = self.activation(x)
x = self.spatial_gating_unit(x)
x = self.proj_2(x)
x = x + shortcut # 残差连接
return x
class Block(nn.Module):
""" 网络块,包括注意力和MLP """
def __init__(self, dim, mlp_ratio=4., drop=0., drop_path=0., act_layer=nn.GELU):
super().__init__()
self.attn = Attention(dim) # 注意力模块
self.mlp = Mlp(in_features=dim, hidden_features=int(dim * mlp_ratio), act_layer=act_layer, drop=drop) # MLP模块
self.drop_path = nn.Identity() if drop_path <= 0. else DropPath(drop_path) # 随机深度
def forward(self, x):
""" 前向传播 """
x = x + self.drop_path(self.attn(x)) # 添加注意力模块的输出
x = x + self.drop_path(self.mlp(x)) # 添加MLP模块的输出
return x
class LSKNet(nn.Module):
""" LSKNet网络结构 """
def __init__(self, img_size=224, in_chans=3, embed_dims=[64, 128, 256, 512], depths=[3, 4, 6, 3]):
super().__init__()
self.num_stages = len(depths) # 网络阶段数
for i in range(self.num_stages):
# 初始化每个阶段的嵌入层和块
patch_embed = OverlapPatchEmbed(img_size=img_size // (2 ** i), in_chans=in_chans if i == 0 else embed_dims[i - 1], embed_dim=embed_dims[i])
block = nn.ModuleList([Block(dim=embed_dims[i]) for _ in range(depths[i])])
setattr(self, f"patch_embed{i + 1}", patch_embed)
setattr(self, f"block{i + 1}", block)
def forward(self, x):
""" 前向传播 """
outs = []
for i in range(self.num_stages):
patch_embed = getattr(self, f"patch_embed{i + 1}")
block = getattr(self, f"block{i + 1}")
x, _, _ = patch_embed(x) # 嵌入层
for blk in block:
x = blk(x) # 块的前向传播
outs.append(x) # 保存每个阶段的输出
return outs
class DWConv(nn.Module):
""" 深度卷积模块 """
def __init__(self, dim=768):
super(DWConv, self).__init__()
self.dwconv = nn.Conv2d(dim, dim, 3, padding=1, groups=dim) # 深度卷积
def forward(self, x):
""" 前向传播 """
return self.dwconv(x)
def lsknet_t(weights=''):
""" 创建LSKNet_t模型并加载权重 """
model = LSKNet(embed_dims=[32, 64, 160, 256], depths=[3, 3, 5, 2])
if weights:
model.load_state_dict(torch.load(weights)['state_dict'])
return model
if __name__ == '__main__':
model = lsknet_t('lsk_t_backbone.pth') # 创建模型
inputs = torch.randn((1, 3, 640, 640)) # 随机输入
for i in model(inputs):
print(i.size()) # 输出每个阶段的特征图大小
代码说明:
- Mlp:实现了一个多层感知机模块,包含两个卷积层和一个深度卷积层,使用Dropout进行正则化。
- Attention:实现了一个注意力机制模块,包含线性投影和空间门控单元。
- Block:定义了一个网络块,包含注意力模块和MLP模块,支持残差连接。
- LSKNet:主网络结构,包含多个阶段,每个阶段由嵌入层和多个块组成。
- DWConv:实现了深度卷积,用于特征提取。
- lsknet_t:用于创建LSKNet_t模型并加载预训练权重的函数。
这个程序文件定义了一个名为 lsknet.py 的深度学习模型,主要用于图像处理任务。它使用了 PyTorch 框架,并实现了一种名为 LSKNet 的网络结构。以下是对代码的详细讲解。
首先,文件导入了必要的库,包括 PyTorch 的核心模块和一些辅助函数。接着,定义了一个名为 Mlp 的类,这个类实现了一个多层感知机(MLP),包含两个卷积层和一个深度卷积层。它的前向传播方法依次通过这些层,并在每个层之间应用激活函数和 dropout。
接下来,定义了 LSKblock 类,这是 LSKNet 的核心构建块之一。该类使用了多个卷积层来提取特征,并通过不同的方式计算注意力机制。具体来说,它首先通过深度卷积和空间卷积获取特征,然后将这些特征进行融合,最后通过一个卷积层生成最终的注意力输出。
Attention 类则实现了一个注意力机制,包含两个投影层和一个 LSKblock。在前向传播中,它将输入通过投影层,激活函数,注意力块,然后再通过另一个投影层,最后与输入相加,形成残差连接。
Block 类是 LSKNet 的基本单元,结合了注意力机制和 MLP。它使用批归一化层对输入进行标准化,并通过 DropPath 实现随机深度的功能,以增强模型的泛化能力。
OverlapPatchEmbed 类用于将输入图像分割成重叠的补丁,并进行嵌入。它通过卷积层将输入通道转换为嵌入维度,并进行归一化处理。
LSKNet 类是整个网络的主体,负责构建不同阶段的网络结构。它根据输入参数设置不同的嵌入维度、深度和其他超参数,并在前向传播中依次通过各个阶段的嵌入、块和归一化层。
DWConv 类实现了深度卷积操作,用于特征提取。
此外,文件中还定义了 update_weight 函数,用于更新模型的权重。它会检查权重字典中的每个键是否存在于模型字典中,并且形状是否匹配。
最后,提供了两个函数 lsknet_t 和 lsknet_s,分别用于创建不同配置的 LSKNet 模型,并可以选择加载预训练权重。
在文件的最后部分,提供了一个示例代码块,展示了如何实例化 lsknet_t 模型并进行一次前向传播,输出每个阶段的特征图的尺寸。
整体来看,这个文件实现了一个复杂的深度学习模型,结合了多种先进的网络结构和技术,适用于图像分类或其他视觉任务。
10.4 utils.py
以下是代码中最核心的部分,并附上详细的中文注释:
import torch
import torch.nn.functional as F
def multi_scale_deformable_attn_pytorch(
value: torch.Tensor,
value_spatial_shapes: torch.Tensor,
sampling_locations: torch.Tensor,
attention_weights: torch.Tensor,
) -> torch.Tensor:
"""
多尺度可变形注意力机制。
参数:
- value: 输入特征图,形状为 (bs, C, num_heads, embed_dims)
- value_spatial_shapes: 特征图的空间形状,形状为 (num_levels, 2)
- sampling_locations: 采样位置,形状为 (bs, num_queries, num_heads, num_levels, num_points, 2)
- attention_weights: 注意力权重,形状为 (bs, num_heads, num_queries, num_levels, num_points)
返回:
- output: 经过多尺度可变形注意力机制处理后的输出,形状为 (bs, num_queries, num_heads * embed_dims)
"""
bs, _, num_heads, embed_dims = value.shape # 获取输入特征图的形状
_, num_queries, _, num_levels, num_points, _ = sampling_locations.shape # 获取采样位置的形状
# 将输入特征图按照空间形状分割成多个特征图
value_list = value.split([H_ * W_ for H_, W_ in value_spatial_shapes], dim=1)
# 将采样位置转换到[-1, 1]范围
sampling_grids = 2 * sampling_locations - 1
sampling_value_list = []
# 遍历每个尺度的特征图
for level, (H_, W_) in enumerate(value_spatial_shapes):
# 将特征图调整形状以便进行采样
value_l_ = value_list[level].flatten(2).transpose(1, 2).reshape(bs * num_heads, embed_dims, H_, W_)
# 调整采样网格的形状
sampling_grid_l_ = sampling_grids[:, :, :, level].transpose(1, 2).flatten(0, 1)
# 使用双线性插值进行特征图的采样
sampling_value_l_ = F.grid_sample(
value_l_, sampling_grid_l_, mode="bilinear", padding_mode="zeros", align_corners=False
)
sampling_value_list.append(sampling_value_l_)
# 调整注意力权重的形状
attention_weights = attention_weights.transpose(1, 2).reshape(
bs * num_heads, 1, num_queries, num_levels * num_points
)
# 计算最终输出
output = (
(torch.stack(sampling_value_list, dim=-2).flatten(-2) * attention_weights)
.sum(-1)
.view(bs, num_heads * embed_dims, num_queries)
)
return output.transpose(1, 2).contiguous() # 返回形状为 (bs, num_queries, num_heads * embed_dims) 的输出
代码核心部分说明:
-
输入参数:
value:输入特征图,包含多个头部和嵌入维度。value_spatial_shapes:特征图的空间形状,指示每个尺度的高度和宽度。sampling_locations:用于采样的空间位置。attention_weights:每个查询对应的注意力权重。
-
处理流程:
- 将输入特征图分割为多个尺度的特征图。
- 将采样位置转换为[-1, 1]范围,以适应
grid_sample函数。 - 对每个尺度的特征图进行采样,使用双线性插值。
- 计算加权后的采样特征图,并生成最终输出。
-
输出:
- 返回经过多尺度可变形注意力机制处理后的特征图,形状为
(bs, num_queries, num_heads * embed_dims)。
- 返回经过多尺度可变形注意力机制处理后的特征图,形状为
这个程序文件 utils.py 是一个用于实现一些常用功能的模块,主要与深度学习和计算机视觉中的多尺度可变形注意力机制相关。代码中使用了 PyTorch 库,包含了一些初始化、数学运算和注意力机制的实现。
首先,文件导入了一些必要的库,包括 copy、math、numpy 和 torch,以及 PyTorch 的神经网络模块和功能模块。接着,定义了一个 __all__ 列表,指定了模块中可导出的公共接口。
_get_clones 函数用于创建一个给定模块的克隆列表。它接受一个模块和一个整数 n,返回一个包含 n 个克隆模块的 ModuleList,这在构建具有多个相同层的网络时非常有用。
bias_init_with_prob 函数用于根据给定的先验概率初始化卷积或全连接层的偏置值。它使用了对数几率的公式,将概率转换为偏置值,以便在训练过程中更好地引导模型。
linear_init 函数用于初始化线性模块的权重和偏置。它根据模块的权重形状计算一个边界值,并使用均匀分布初始化权重和偏置,这有助于模型的收敛。
inverse_sigmoid 函数计算给定张量的反 sigmoid 函数。它首先将输入张量限制在 [0, 1] 的范围内,然后通过对数运算计算反 sigmoid 值,这在某些模型中用于梯度反向传播时的计算。
multi_scale_deformable_attn_pytorch 函数实现了多尺度可变形注意力机制。它接受多个输入参数,包括值张量、空间形状、采样位置和注意力权重。函数首先对输入进行形状处理,然后使用 F.grid_sample 函数进行双线性插值,从而根据采样位置获取相应的值。最后,通过加权求和的方式计算输出,返回经过处理的张量。
总体来说,这个模块提供了一些基础的工具和函数,旨在支持深度学习模型中复杂的注意力机制,尤其是在处理多尺度特征时的应用。
注意:由于此博客编辑较早,上面“10.YOLOv11核心改进源码讲解”中部分代码可能会优化升级,仅供参考学习,以“11.完整训练+Web前端界面+200+种全套创新点源码、数据集获取(由于版权原因,本博客仅提供【原始博客的链接】,原始博客提供下载链接)”的内容为准。
11.完整训练+Web前端界面+200+种全套创新点源码、数据集获取(由于版权原因,本博客仅提供【原始博客的链接】,原始博客提供下载链接)

参考原始博客1: https://gitee.com/Vision-Studios/Grocery81
参考原始博客2: https://github.com/Qunmasj-Vision-Studio/Grocery81