STM32 BootLoader 刷新项目 (十) Flash擦除-命令0x56
STM32 BootLoader 刷新项目 (十) Flash擦除-命令0x56
1. STM32F407 BootLoader 中的 Flash 擦除功能详解
在嵌入式系统中,BootLoader 的设计是非常关键的部分,它负责引导主程序的启动、升级以及安全管理。而在 STM32F407 等 MCU 上实现 BootLoader,Flash 操作则是其中的核心功能之一。本文将重点介绍 STM32F407 上的 Flash 擦除功能,并给出实现过程和注意事项。
一、STM32F407 Flash 结构概述
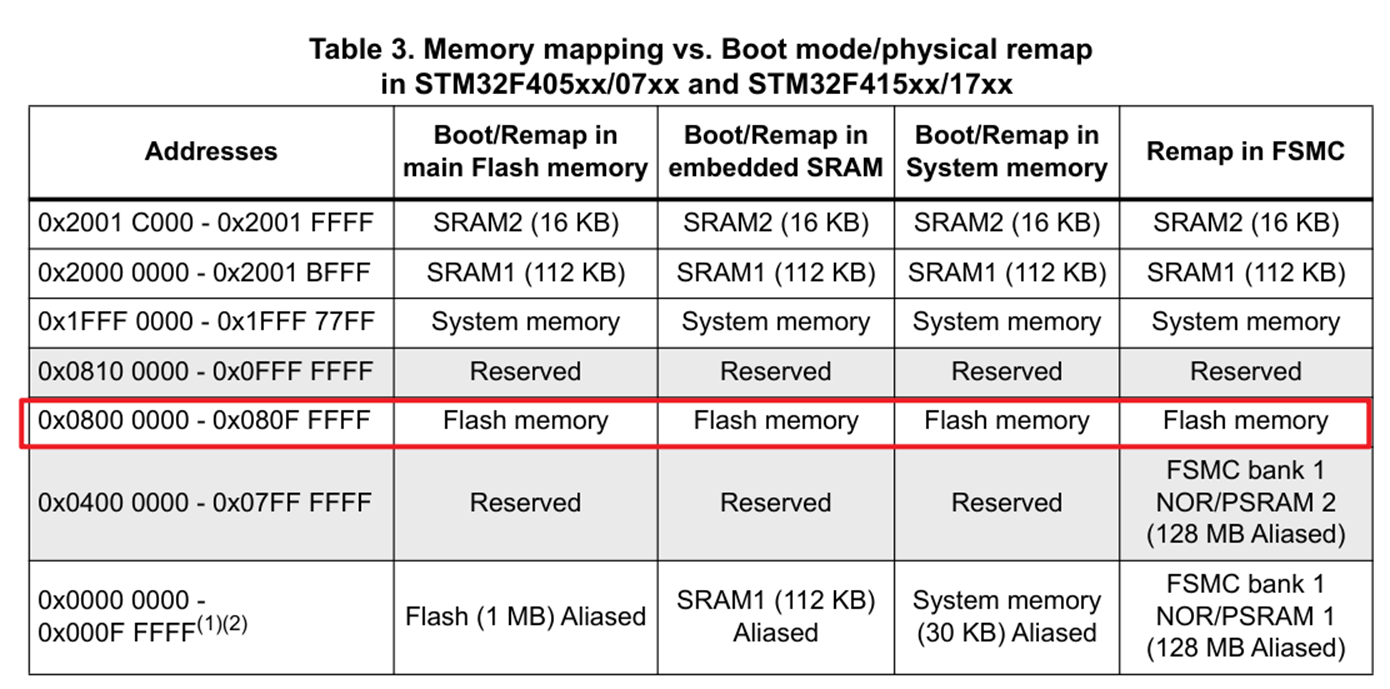
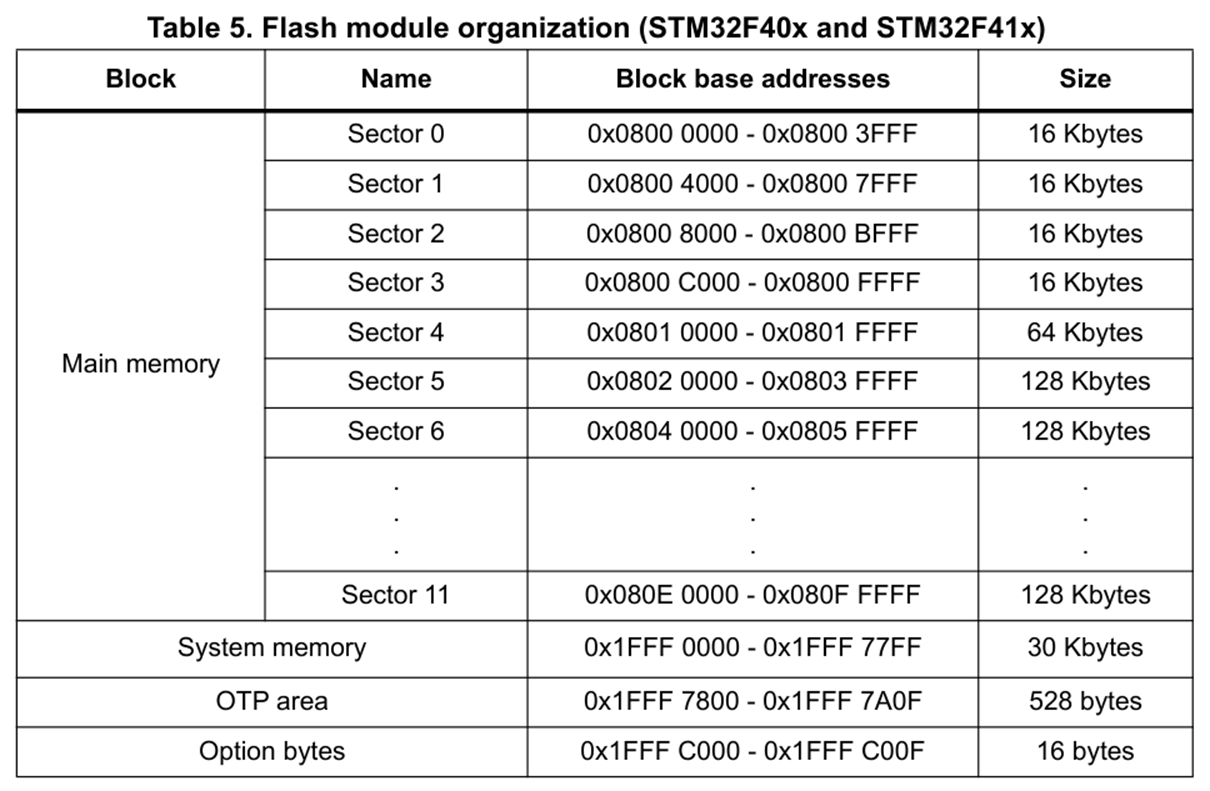
STM32F407 芯片采用 Cortex-M4 内核,内置 Flash 存储用于程序和数据存储。STM32F407 的 Flash 大小为 512KB,分为若干个扇区(Sector),每个扇区的大小并不相同:
- 扇区 0 到 3:16KB 每扇区
- 扇区 4:64KB
- 扇区 5 到 11:128KB 每扇区
这种不同大小的扇区设计适合不同的应用需求,比如小容量扇区用于存储配置数据,大容量扇区用于存储固件。
二、Flash 擦除的原理
Flash 擦除是将 Flash 中的某个扇区的数据重置为 0xFF。由于 Flash 的物理特性,写操作只能将位设置为 0,而擦除操作将位恢复为 1。因此,在更新 Flash 数据时,通常需要先擦除再写入。
在 STM32F407 中,Flash 擦除只能以扇区为单位进行,这意味着无法擦除扇区中的部分数据。每次擦除扇区时,整个扇区的数据都会被清空。
三、Flash 擦除的操作流程
在 STM32F407 的 BootLoader 中实现 Flash 擦除,一般需要遵循以下步骤:
- 解锁 Flash 控制寄存器:在进行任何 Flash 操作之前,需要解锁 Flash 的写保护功能。
- 等待 Flash 空闲:检查 Flash 状态寄存器,确保没有其他操作正在进行。
- 启动扇区擦除:设置目标扇区并启动擦除命令。
- 等待擦除完成:监控状态寄存器中的
BSY位,等待擦除操作完成。 - 锁定 Flash 控制寄存器:完成操作后,将 Flash 锁定,以防止误操作。
四、Flash 擦除实现代码
以下是 STM32F407 上实现 Flash 擦除的代码示例。本文假设使用了 STM32 标准外设库,便于调用硬件寄存器。
#include "stm32f4xx.h"
/**
* @brief 擦除 Flash 指定扇区
* @param sector 要擦除的扇区编号
* @retval 0 表示成功,-1 表示失败
*/
int Flash_EraseSector(uint8_t sector)
{
// 解锁 Flash 控制寄存器
FLASH_Unlock();
// 等待 Flash 空闲
while (FLASH_GetStatus() == FLASH_BUSY);
// 擦除操作
FLASH_ClearFlag(FLASH_FLAG_EOP | FLASH_FLAG_OPERR | FLASH_FLAG_WRPERR | FLASH_FLAG_PGAERR | FLASH_FLAG_PGPERR | FLASH_FLAG_PGSERR);
FLASH_Status status = FLASH_EraseSector(sector, VoltageRange_3);
// 等待擦除完成
if (status != FLASH_COMPLETE)
{
FLASH_Lock();
return -1; // 擦除失败
}
// 锁定 Flash 控制寄存器
FLASH_Lock();
return 0; // 擦除成功
}
五、代码详解
FLASH_Unlock():此函数用于解锁 Flash 控制寄存器,以允许擦除和写入操作。FLASH_GetStatus():用于检查 Flash 是否处于忙碌状态。擦除操作会占用一定的时间,必须等待 Flash 空闲后才能继续。FLASH_ClearFlag():清除可能出现的错误标志位,确保擦除操作不会受到之前错误的影响。FLASH_EraseSector():这是 STM32 库中的擦除函数,输入参数为扇区编号和电压范围(STM32F4 系列通常使用VoltageRange_3)。FLASH_Lock():操作完成后锁定 Flash 控制寄存器,以防止意外操作。
六、Flash 擦除的注意事项
- 擦除单位:在 STM32F407 中,Flash 擦除只能以扇区为单位进行,无法进行字节或页的擦除。因此,设计 BootLoader 时要合理分配数据的存储位置,避免不必要的擦除操作。
- 电压范围:擦除 Flash 时,电源电压必须在一定范围内,低电压下可能导致擦除失败甚至损坏 Flash。STM32F407 提供了多种电压模式,通常选择
VoltageRange_3即可。 - 错误处理:Flash 擦除失败可能会出现各种错误,例如写保护、编程错误等。建议在擦除操作前后清除并检查错误标志。
- 数据备份:在擦除前备份必要的数据。在 BootLoader 中进行固件更新时,最好将旧固件暂时保存至其他存储介质中,以应对擦除或写入失败的情况。
- 上电时间:Flash 擦除时间较长,尤其是 128KB 扇区,因此在设计 BootLoader 时需要考虑电源的持续供电能力,避免中途掉电。
2. BootLoader Flash划分
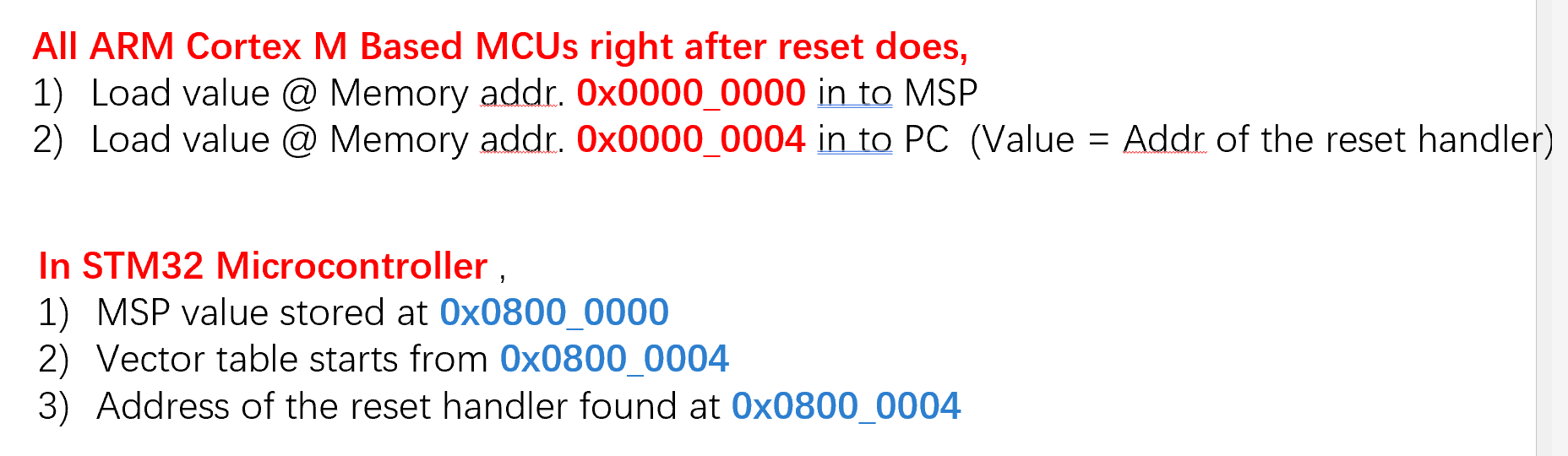
由下图可以看出本BootLoader的Flash的划分,其中划给BootLoader为32KB,从0x0800 0000-0x0800 7FFF,占用Sector 0-1两个段。App应用程序占用0x0800 8000-0x080F FFFF,总共10个Sector。
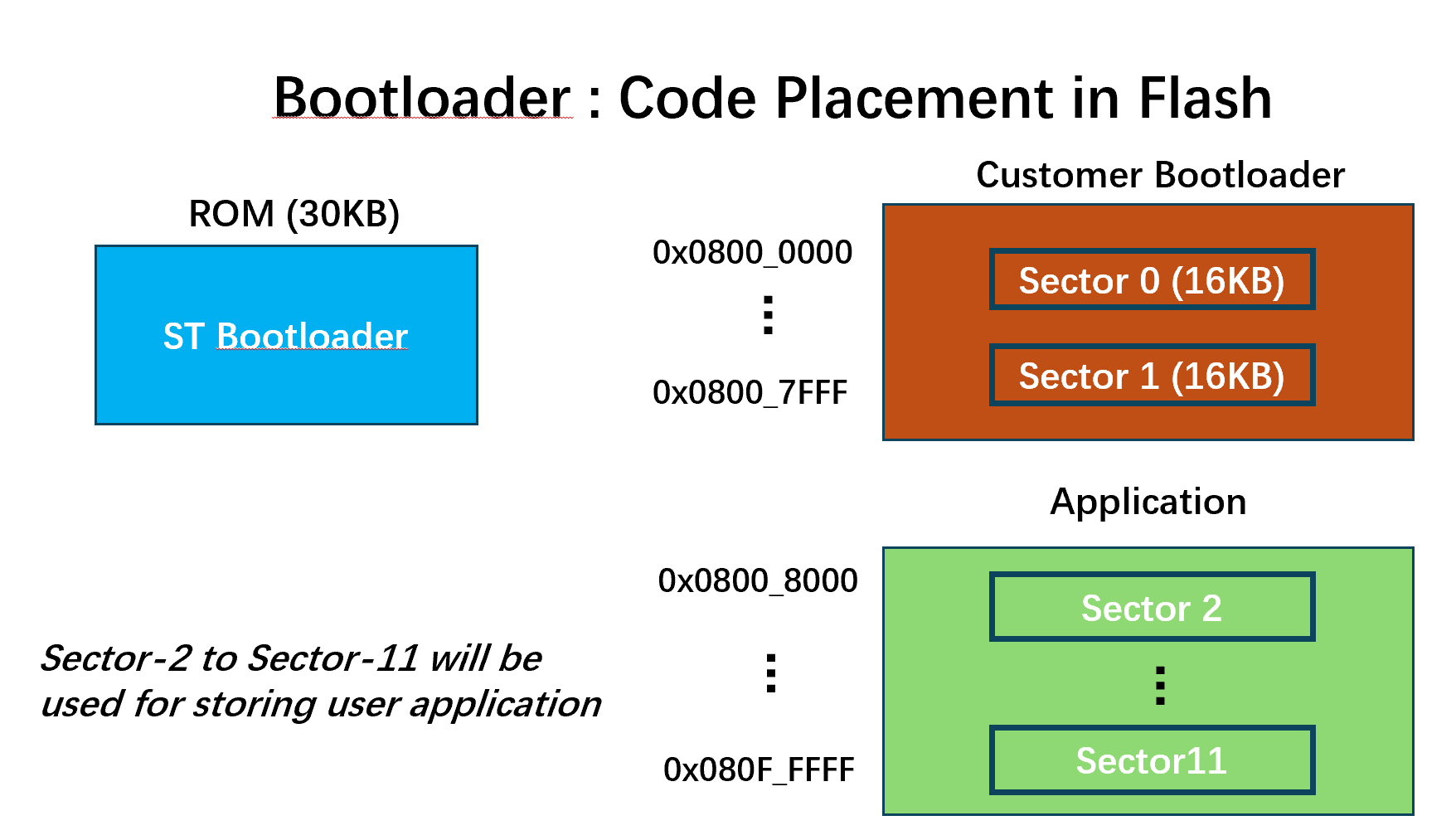
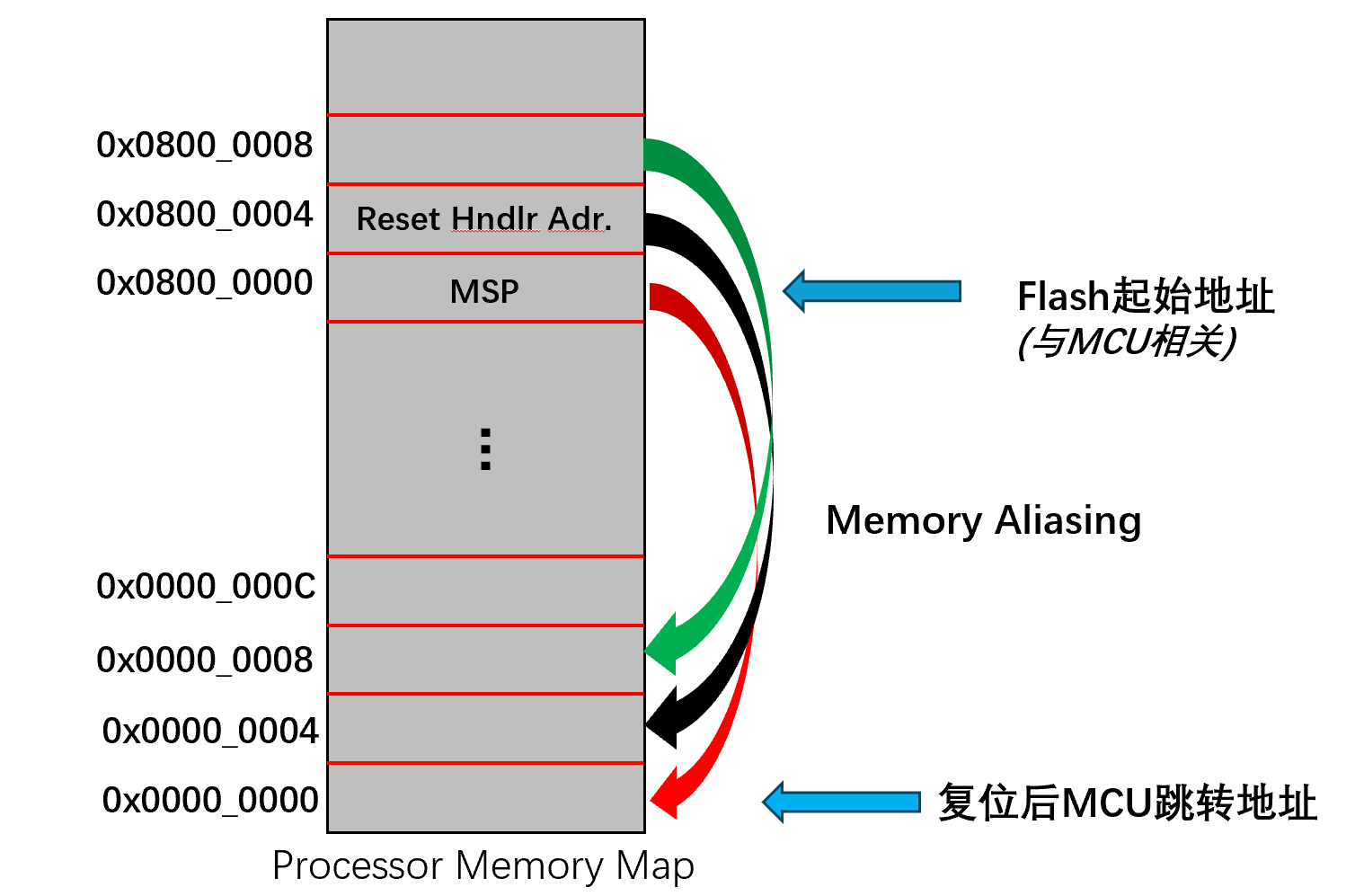
下面是BootLoader的跳转过程,关于具体的跳转过程,可以参考上一篇文章: STM32 BootLoader 刷新项目 (九) 跳转指定地址-命令0x55
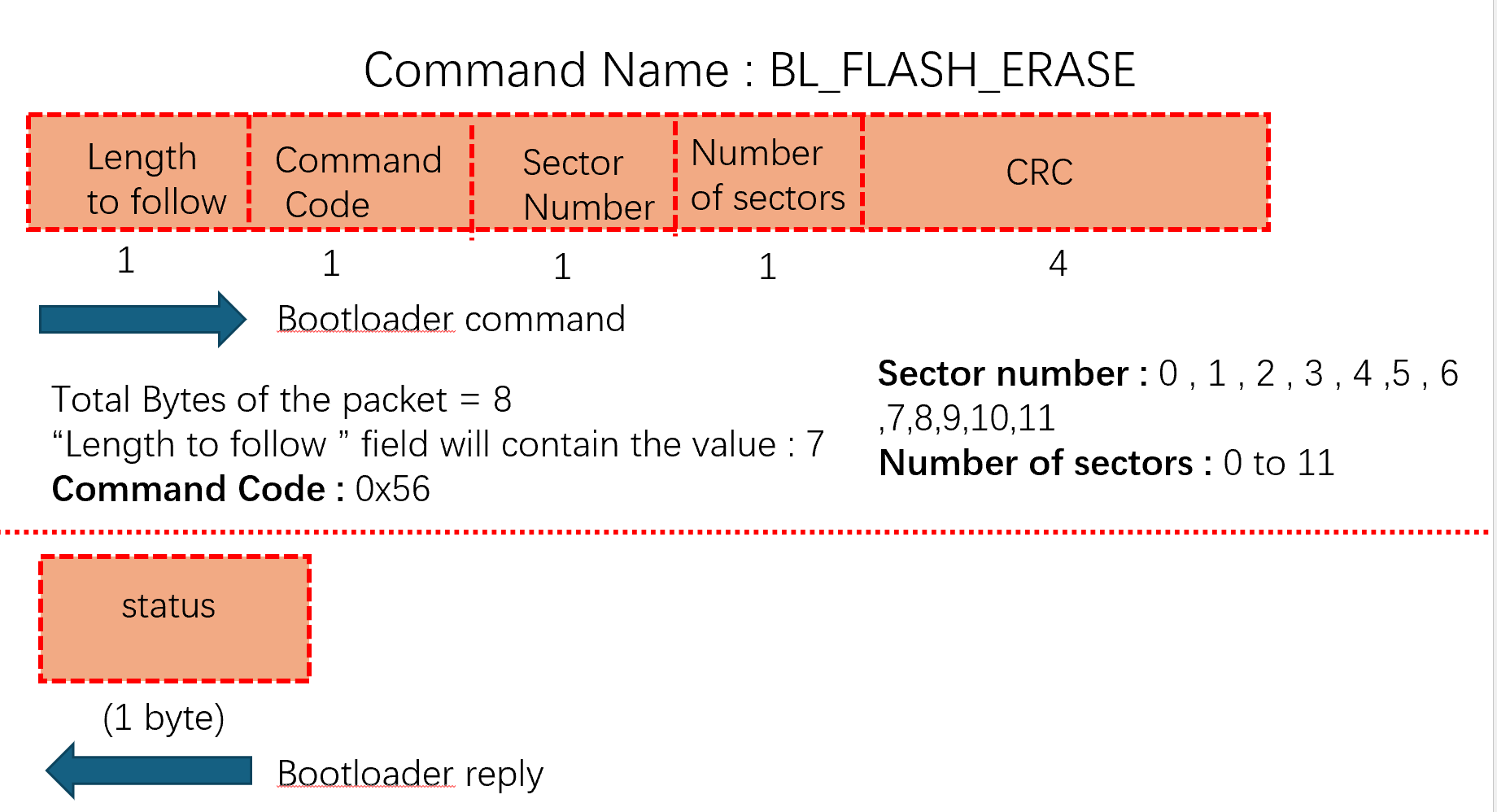
3. 0x56命令介绍–Flash擦除
在本篇文章,我们的主要是介绍0x56的命令,这个命令主要是在BootLoader中擦除指定Flash Sector的命令。
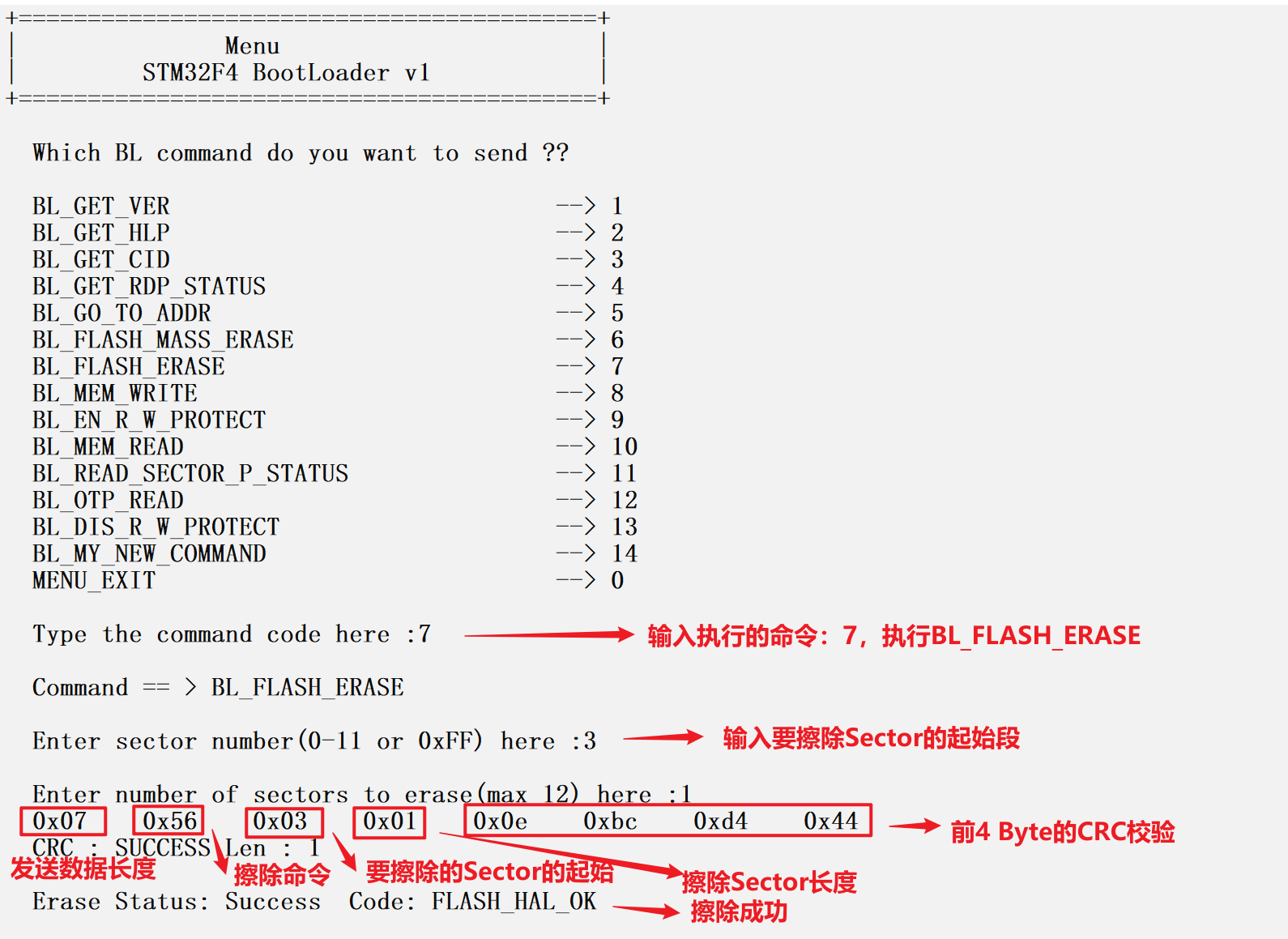
通过上位机发送8 Byte的数据,其中第1 Byte为整个数据的长度,第2Byte为指令码,第3 Byte为要擦除Flash的起始Sector序号,第4 Byte是擦除Sector的长度,第5-8 Byte为前6个Byte的CRC校验值。上位机通过串口UART发送给下位机,下位机回复地址是否擦除成功的标志。
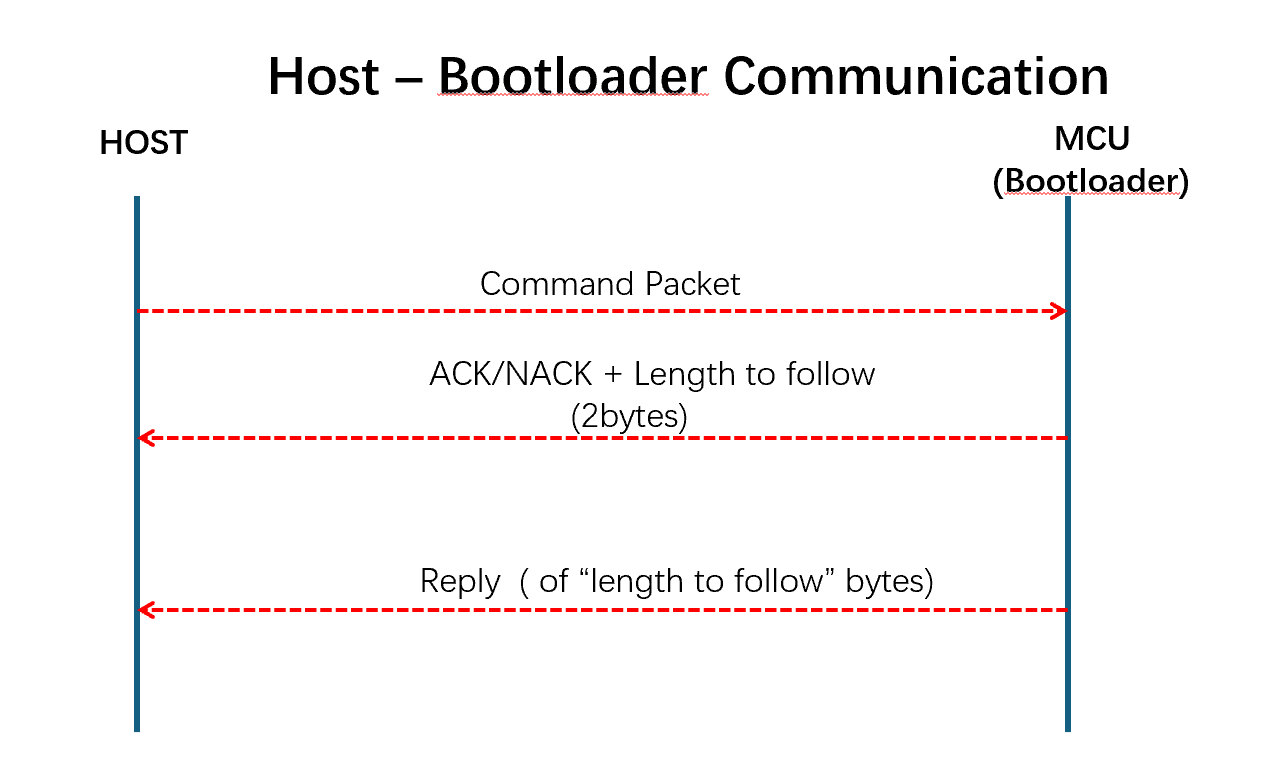
下面是发送命令过程中上位机与BootLoader之间的交互。
4. Flash擦除命令程序设计
下面我们来进行程序设计,下面是读取上位机指令,并解析指令的过程,通过switch case判断执行哪种命令。目前通过上位机执行BL_FLASH_ERASE指令,然后执行bootloader_handle_flash_erase_cmd(bl_rx_buffer)函数。
下面是代码的详细注释和分析:
bootloader_uart_read_data 函数
该函数用于从主机接收命令数据并调用相应的处理函数来执行命令。它是 BootLoader 的核心输入接口,通过 UART 接收主机的命令,并根据命令类型分发到对应的处理函数。
void bootloader_uart_read_data(void)
{
uint8_t rcv_len = 0;
// 打印调试信息,提示接收到命令
printmsg_Host("BL_DEBUG_MSG: Receive CMD\n\r");
// 无限循环,持续接收命令并处理
while (1)
{
// 将 LED2 熄灭,表示进入命令接收状态
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, GPIO_PIN_RESET);
// 清空接收缓冲区,防止残留数据干扰
memset(bl_rx_buffer, 0, 200);
// 读取命令包的第一个字节,即命令的长度字段
HAL_UART_Receive(C_UART, bl_rx_buffer, 1, HAL_MAX_DELAY);
// 获取命令包长度,长度字节位于第一个字节
rcv_len = bl_rx_buffer[0];
// 根据命令包长度读取剩余的字节
HAL_UART_Receive(C_UART, &bl_rx_buffer[1], rcv_len, HAL_MAX_DELAY);
// 根据命令码执行相应的命令处理函数
switch (bl_rx_buffer[1])
{
case BL_GET_VER:
// 处理获取版本命令
bootloader_handle_getver_cmd(bl_rx_buffer);
break;
case BL_GET_HELP:
// 处理获取帮助命令
bootloader_handle_gethelp_cmd(bl_rx_buffer);
break;
case BL_GET_CID:
// 处理获取芯片 ID 命令
bootloader_handle_getcid_cmd(bl_rx_buffer);
break;
case BL_GET_RDP_STATUS:
// 处理获取读保护状态命令
bootloader_handle_getrdp_cmd(bl_rx_buffer);
break;
case BL_GO_TO_ADDR:
// 处理跳转到地址命令
bootloader_handle_go_cmd(bl_rx_buffer);
break;
case BL_FLASH_ERASE:
// 处理 Flash 擦除命令
bootloader_handle_flash_erase_cmd(bl_rx_buffer);
break;
default:
// 未知命令,打印调试信息
printmsg("BL_DEBUG_MSG: Invalid command code received from host \n");
break;
}
}
}
- 初始化和循环:函数会无限循环等待主机发送的命令并进行解析。
- 数据接收:首先读取一个字节的长度字段,然后根据这个长度读取完整的命令数据。
- 命令解析:通过
switch语句解析命令码,并调用相应的处理函数。 - 错误处理:如果命令码不在预期范围内,打印调试信息。
bootloader_handle_flash_erase_cmd 函数
该函数处理 BL_FLASH_ERASE 命令,通过接收到的参数执行 Flash 擦除操作。
void bootloader_handle_flash_erase_cmd(uint8_t *pBuffer)
{
uint8_t erase_status = 0x00;
printmsg("BL_DEBUG_MSG: bootloader_handle_flash_erase_cmd\n");
// 获取命令包的总长度
uint32_t command_packet_len = bl_rx_buffer[0] + 1;
// 从命令包中提取主机发送的 CRC32 值
uint32_t host_crc = *((uint32_t *)(bl_rx_buffer + command_packet_len - 4));
// 验证接收到的数据包的 CRC 校验
if (!bootloader_verify_crc(&bl_rx_buffer[0], command_packet_len - 4, host_crc))
{
// 如果校验成功
printmsg("BL_DEBUG_MSG: checksum success !!\n");
// 发送 ACK 响应,确认命令长度为 1 字节
bootloader_send_ack(pBuffer[0], 1);
// 打印擦除信息:初始扇区和扇区数量
printmsg("BL_DEBUG_MSG: initial_sector: %d, no_of_sectors: %d\n", pBuffer[2], pBuffer[3]);
// 熄灭 LED 表示擦除操作开始
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, GPIO_PIN_RESET);
// 调用 `execute_flash_erase` 执行擦除操作,传入初始扇区和扇区数量
erase_status = execute_flash_erase(pBuffer[2], pBuffer[3]);
// 重新点亮 LED 表示擦除操作完成
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, GPIO_PIN_SET);
// 打印擦除操作的状态
printmsg("BL_DEBUG_MSG: flash erase status: %#x\n", erase_status);
// 发送擦除状态回主机
bootloader_uart_write_data(&erase_status, 1);
}
else
{
// 如果 CRC 校验失败,发送 NACK 响应
printmsg("BL_DEBUG_MSG: checksum fail !!\n");
bootloader_send_nack();
}
}
- 参数解析和 CRC 校验:从命令包中提取 CRC 值并进行校验,确保数据完整性。
- 发送 ACK 或 NACK:根据 CRC 校验结果发送确认或拒绝响应。
- 擦除操作:如果校验通过,提取擦除操作的初始扇区和扇区数量,然后调用
execute_flash_erase函数执行擦除操作。 - 状态回传:擦除完成后,将操作状态通过 UART 返回给主机。
execute_flash_erase 函数
execute_flash_erase 函数负责执行 Flash 的具体擦除操作,支持部分扇区擦除和全片擦除。
uint8_t execute_flash_erase(uint8_t sector_number, uint8_t number_of_sector)
{
// STM32F407 芯片共有 12 个扇区(0 到 11)
// 如果 sector_number = 0xff,表示全片擦除
FLASH_EraseInitTypeDef flashErase_handle;
uint32_t sectorError;
HAL_StatusTypeDef status;
// 如果指定的扇区数量超过有效范围,返回无效扇区
if (number_of_sector > 11)
return INVALID_SECTOR;
// 检查扇区号是否有效
if ((sector_number == 0xFF) || (sector_number <= 11))
{
// 判断是否全片擦除
if (sector_number == (uint8_t)0xFF)
{
flashErase_handle.TypeErase = FLASH_TYPEERASE_MASSERASE;
}
else
{
// 部分扇区擦除
// 计算剩余可擦除的扇区数
uint8_t remaining_sector = 12 - sector_number;
if (number_of_sector > remaining_sector)
{
number_of_sector = remaining_sector;
}
flashErase_handle.TypeErase = FLASH_TYPEERASE_SECTORS;
flashErase_handle.Sector = sector_number;
flashErase_handle.NbSectors = number_of_sector;
}
// 设置擦除银行(STM32F4 系列有两个 Flash Bank,选取 Bank 1)
flashErase_handle.Banks = FLASH_BANK_1;
// 解锁 Flash 寄存器,允许擦除操作
HAL_FLASH_Unlock();
// 设置电压范围,适应 STM32F4 的工作电压范围
flashErase_handle.VoltageRange = FLASH_VOLTAGE_RANGE_3;
// 执行擦除操作,传入擦除配置和错误记录变量
status = (uint8_t)HAL_FLASHEx_Erase(&flashErase_handle, §orError);
// 锁定 Flash 控制寄存器,防止误操作
HAL_FLASH_Lock();
return status; // 返回擦除操作的状态
}
return INVALID_SECTOR; // 如果无效扇区,返回无效状态
}
- 全片和部分擦除:函数支持全片擦除(
sector_number == 0xFF)和从指定扇区开始的部分擦除。 - 擦除范围检查:确保扇区数量不超过剩余的可擦除范围。
- 解锁和锁定:在擦除操作前解锁 Flash 控制寄存器,擦除完成后重新锁定。
- 电压范围设置:设置为
FLASH_VOLTAGE_RANGE_3,适配 STM32F4 的工作电压。 - 状态返回:返回擦除状态,以便调用方确认擦除是否成功。
总结
bootloader_uart_read_data:从 UART 接收命令,解析命令码并调用对应的命令处理函数。bootloader_handle_flash_erase_cmd:处理 Flash 擦除命令,进行 CRC 校验
5. 实战演练
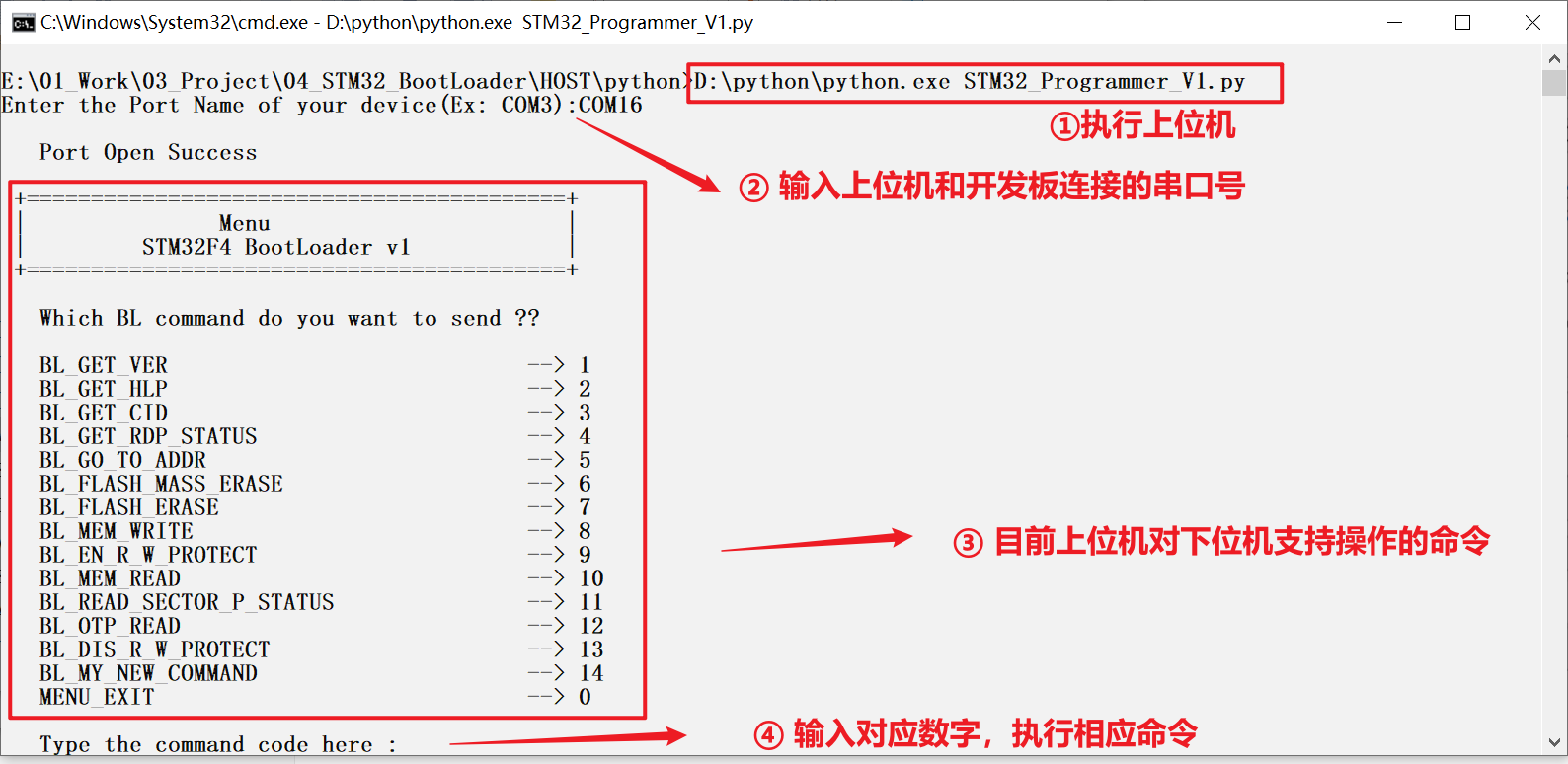
下面是上位机的命令菜单,通过在终端调用Python脚本,然后在终端输入下位机连接的串口号,即可进入命令界面,目前可支持如下命令:
下面我们执行命令–7,执行BL_FLASH_ERASE,即为在BootLoader中执行Flash擦除命令0x56,第一步输入要开始擦除的Sector起始段,第二步输入擦除Sector的长度,最后BootLoader向上位机返回是否擦除成功的Status。
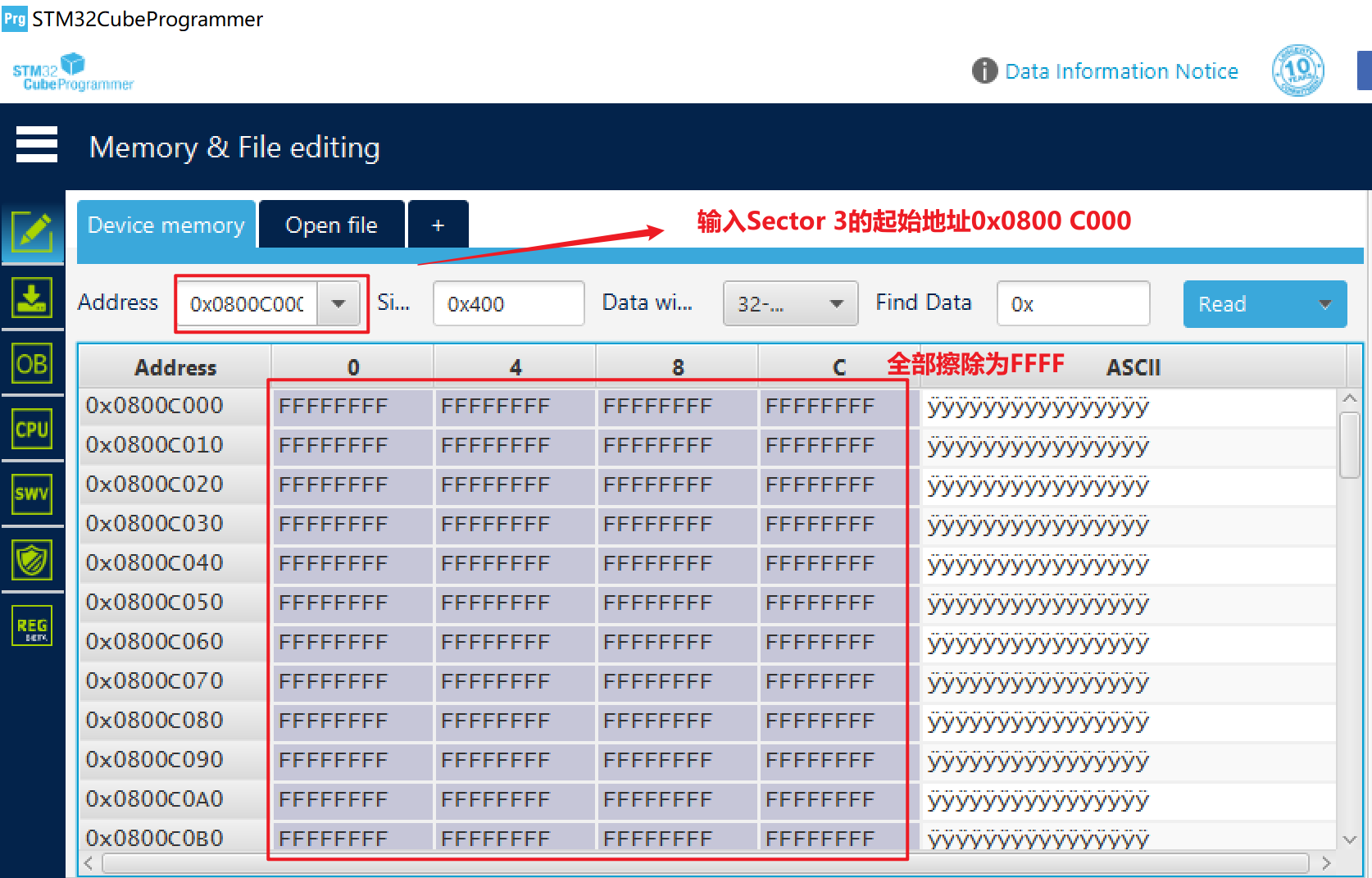
下面我们来看Flash擦除命令是否擦除成功,用STM32CubeProgrammer工具,用ST-LINK连接Debug口,上一步中我们擦除的Sector 3的Flash,这里面我们输入Sector 2的起始地址0x0800 C000,可以看出全部擦除为FF。至此Flash擦除命令已经讲完。
6. 结论
Flash 擦除是 STM32F407 BootLoader 设计中的重要环节,它为固件更新和数据存储提供了基础。本文详细介绍了 Flash 擦除的原理和实现方法,并提供了相关代码和注意事项。在实际应用中,设计人员可以根据需要将擦除功能整合至 BootLoader 的主流程中,确保系统的可靠性和可升级性。
希望本篇文章能为读者在 STM32F407 的 BootLoader 开发中提供一些帮助,若有疑问,欢迎交流讨论。
7. 系列文章
STM32 BootLoader 刷新项目 (一) STM32CubeMX UART串口通信工程搭建
STM32 BootLoader 刷新项目 (二) 方案介绍
STM32 BootLoader 刷新项目 (三) 程序框架搭建及刷新演示
STM32 BootLoader 刷新项目 (四) 通信协议
STM32 BootLoader 刷新项目 (五) 获取软件版本号-命令0x51
STM32 BootLoader 刷新项目 (六) 获取帮助-命令0x52
STM32 BootLoader 刷新项目 (七) 获取芯片ID-0x53
STM32 BootLoader 刷新项目 (八) 读取Flash保护ROP-0x54
STM32 BootLoader 刷新项目 (九) 跳转指定地址-命令0x55