一、强化学习及其关键元素
二、强化学习的分类
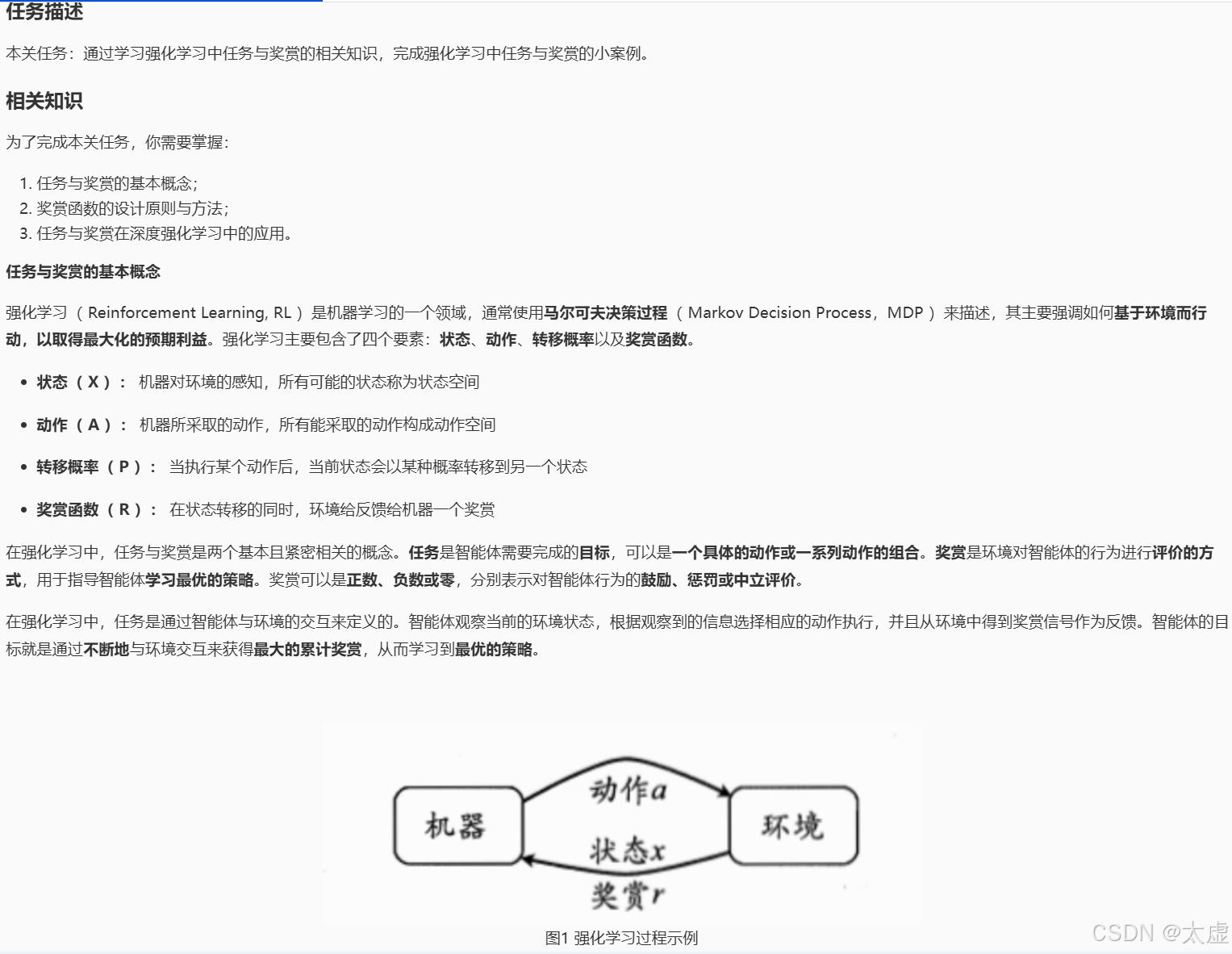
三、任务与奖赏

import numpy as np
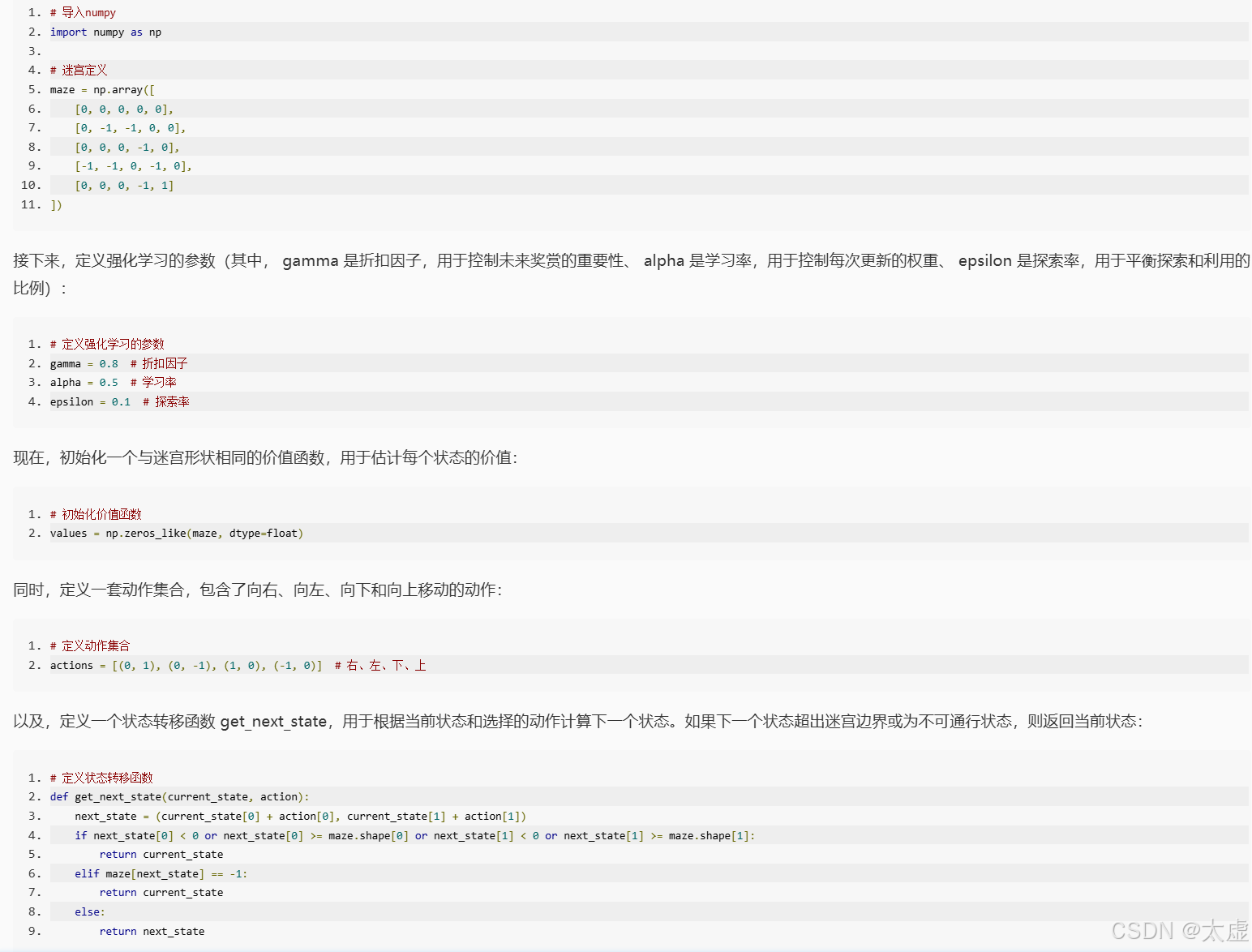
# 迷宫定义
maze = np.array([
[0, 0, 0, 0, 0],
[0, -1, -1, 0, 0],
[0, 0, 0, -1, 0],
[-1, -1, 0, -1, 0],
[0, 0, 0, -1, 1]
])
# 定义强化学习的参数
gamma = 0.8 # 折扣因子
alpha = 0.5 # 学习率
epsilon = 0.1 # 探索率
# 初始化价值函数
values = np.zeros_like(maze, dtype=float)
# 定义动作集合
actions = [(0, 1), (0, -1), (1, 0), (-1, 0)] # 右、左、下、上
# 定义状态转移函数
def get_next_state(current_state, action):
next_state = (current_state[0] + action[0], current_state[1] + action[1])
if next_state[0] < 0 or next_state[0] >= maze.shape[0] or next_state[1] < 0 or next_state[1] >= maze.shape[1]:
return current_state
elif maze[next_state] == -1:
return current_state
else:
return next_state
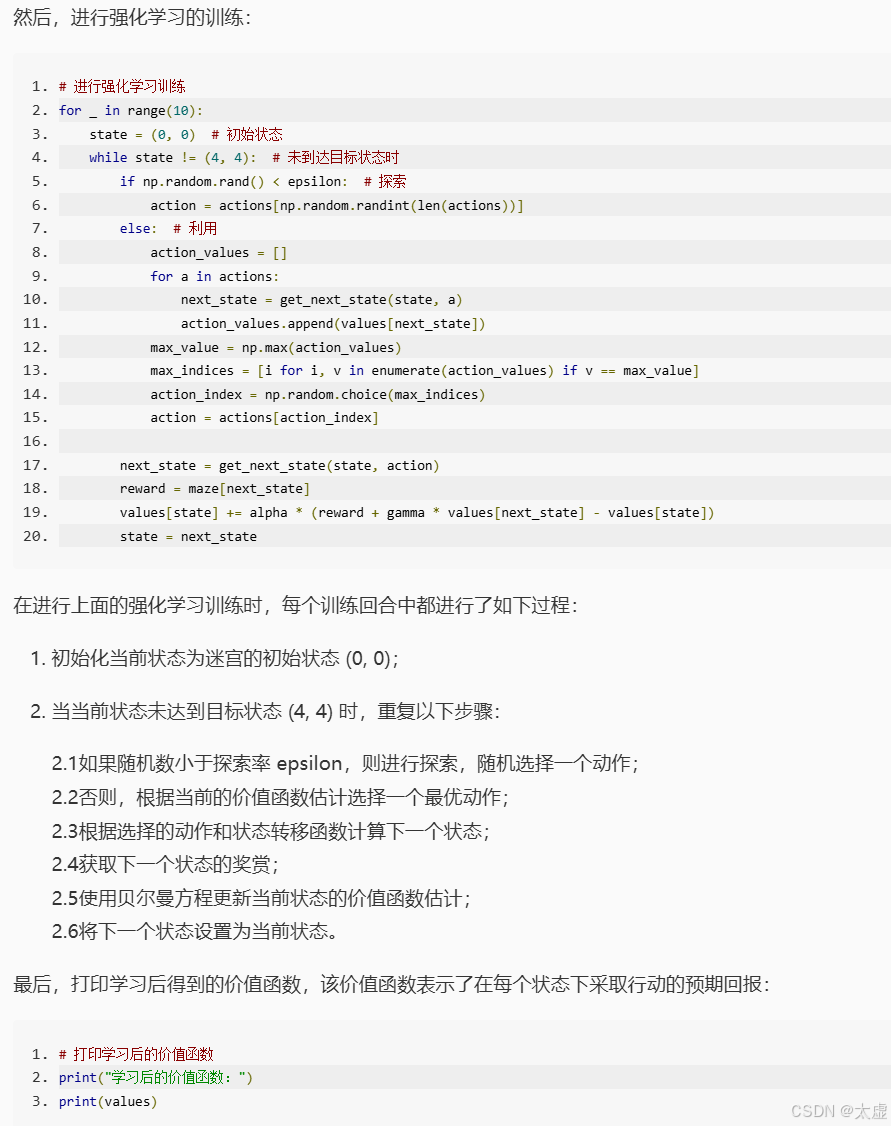
# 进行强化学习训练
num = 0
for _ in range(10):
# 请在下面的 Begin-End 之间按照注释中给出的提示编写正确的代码
########## Begin ##########
state = (0, 0) # 初始状态
while state != (4, 4): # 未到达目标状态时
if np.random.rand() < epsilon: # 探索
action = actions[np.random.randint(len(actions))]
else: # 利用
action_values = []
for a in actions:
next_state = get_next_state(state, a)
action_values.append(values[next_state])
max_value = np.max(action_values)
max_indices = [i for i, v in enumerate(action_values) if v == max_value]
action_index = np.random.choice(max_indices)
action = actions[action_index]
next_state = get_next_state(state, action)
reward = maze[next_state]
values[state] += alpha * (reward + gamma * values[next_state] - values[state])
state = next_state
########## End ##########
next_state = get_next_state(state, action)
reward = maze[next_state]
values[state] += alpha * (reward + gamma * values[next_state] - values[state])
state = next_state
num = num + 1
四、K-摇臂赌博机
1.探索与利用
import numpy as np
# 请在下面的 Begin-End 之间按照注释中给出的提示编写正确的代码
########## Begin ##########
# 定义k-摇臂赌博机类
# 定义k-摇臂赌博机类
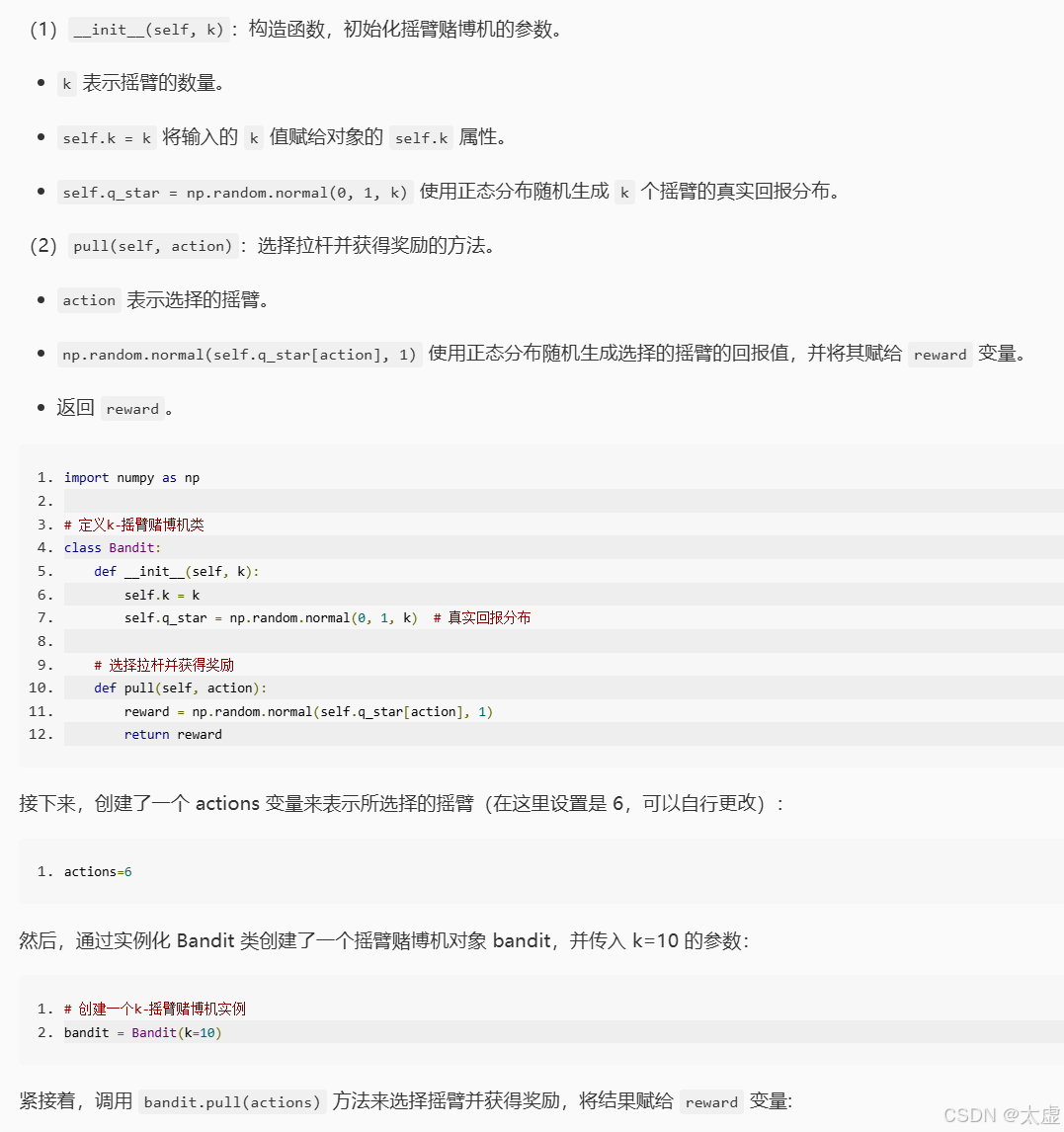
class Bandit:
def __init__(self, k):
self.k = k
self.q_star = np.random.normal(0, 1, k) # 真实回报分布
# 选择拉杆并获得奖励
def pull(self, action):
reward = np.random.normal(self.q_star[action], 1)
return reward
# 选择摇臂
actions=6
# 第六步:创建一个 10-摇臂赌博机实例
bandit = Bandit(k=10)
# 第七步:完成一次摇臂选择和奖励获取
reward = bandit.pull(actions)
# 选择摇臂
actions=6
########## End ##########
2.ϵ -贪心

import numpy as np
# 定义k-摇臂赌博机类
class Bandit:
def __init__(self, k):
self.k = k
self.q_star = np.random.normal(0, 1, k) # 真实回报分布
# 选择拉杆并获得奖励
def pull(self, action):
reward = np.random.normal(self.q_star[action], 1)
return reward
# 请在下面的 Begin-End 之间按照注释中给出的提示编写正确的代码
########## Begin ##########
# 贪心算法
def greedy(bandit, epsilon, num_steps):
q_estimates = np.zeros(bandit.k) # 回报估计值
action_counts = np.zeros(bandit.k) # 拉杆选择次数
rewards = np.zeros(num_steps) # 累积奖励
for step in range(num_steps):
if np.random.random() < epsilon:
# 随机选择拉杆进行探索
action = np.random.randint(0, bandit.k)
else:
# 选择具有最高回报估计值的拉杆进行利用
action = np.argmax(q_estimates)
reward = bandit.pull(action)
action_counts[action] += 1
q_estimates[action] += (reward - q_estimates[action]) / action_counts[action]
rewards[step] = reward
return rewards
########## End ##########
# 创建一个k-摇臂赌博机实例
bandit = Bandit(k=10)
# 使用贪心算法进行探索与利用
epsilon = 0.1
num_steps = 10
rewards_greedy = greedy(bandit, epsilon, num_steps)
3.Softmax
import numpy as np
# 定义k-摇臂赌博机类
class Bandit:
def __init__(self, k):
self.k = k
self.q_star = np.random.normal(0, 1, k) # 真实回报分布
# 选择拉杆并获得奖励
def pull(self, action):
reward = np.random.normal(self.q_star[action], 1)
return reward
# 请在下面的 Begin-End 之间按照注释中给出的提示编写正确的代码
########## Begin ##########
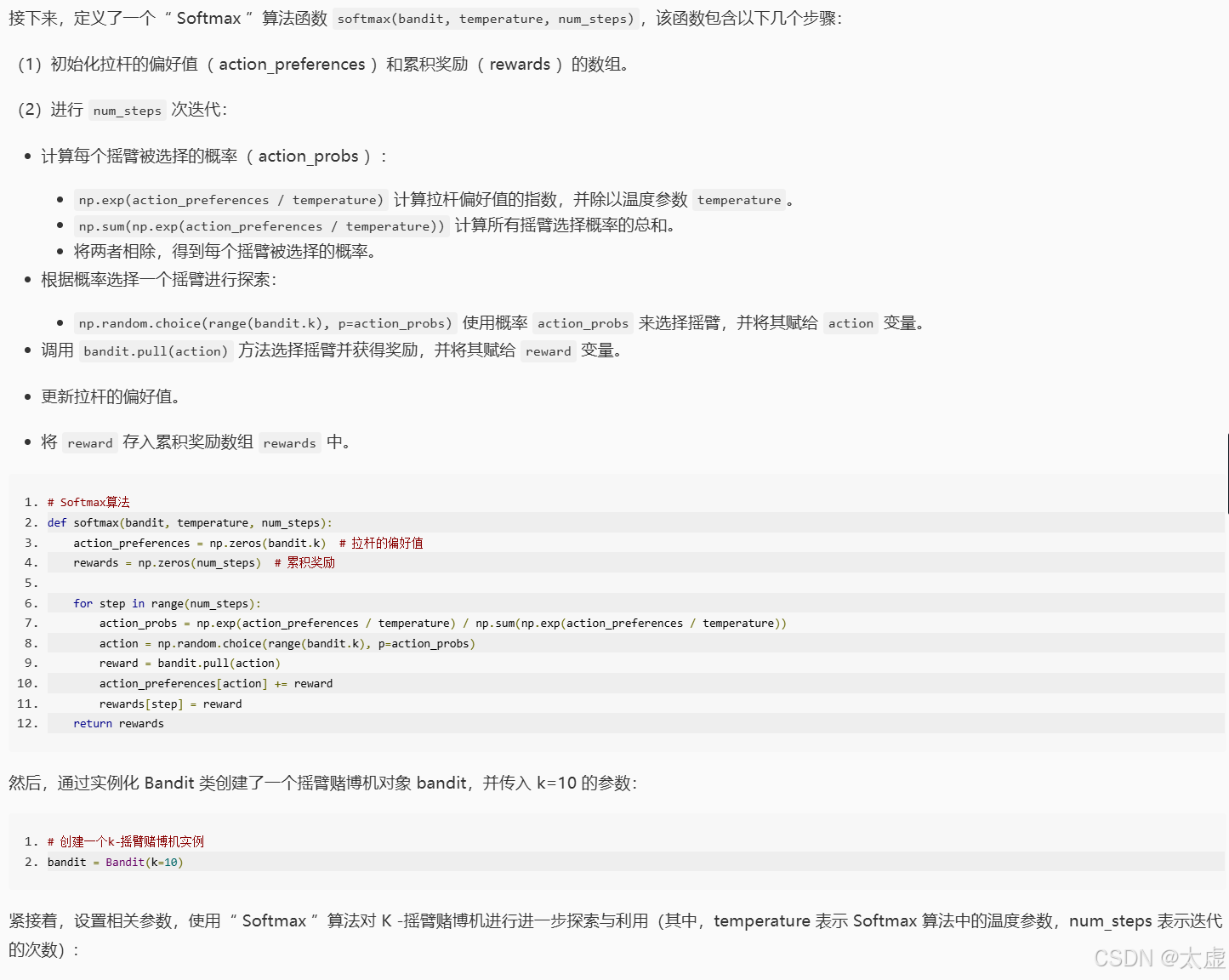
# Softmax算法
def softmax(bandit, temperature, num_steps):
action_preferences = np.zeros(bandit.k) # 拉杆的偏好值
rewards = np.zeros(num_steps) # 累积奖励
for step in range(num_steps):
action_probs = np.exp(action_preferences / temperature) / np.sum(np.exp(action_preferences / temperature))
action = np.random.choice(range(bandit.k), p=action_probs)
reward = bandit.pull(action)
action_preferences[action] += reward
rewards[step] = reward
return rewards
########## End ##########
# 创建一个k-摇臂赌博机实例
bandit = Bandit(k=10)
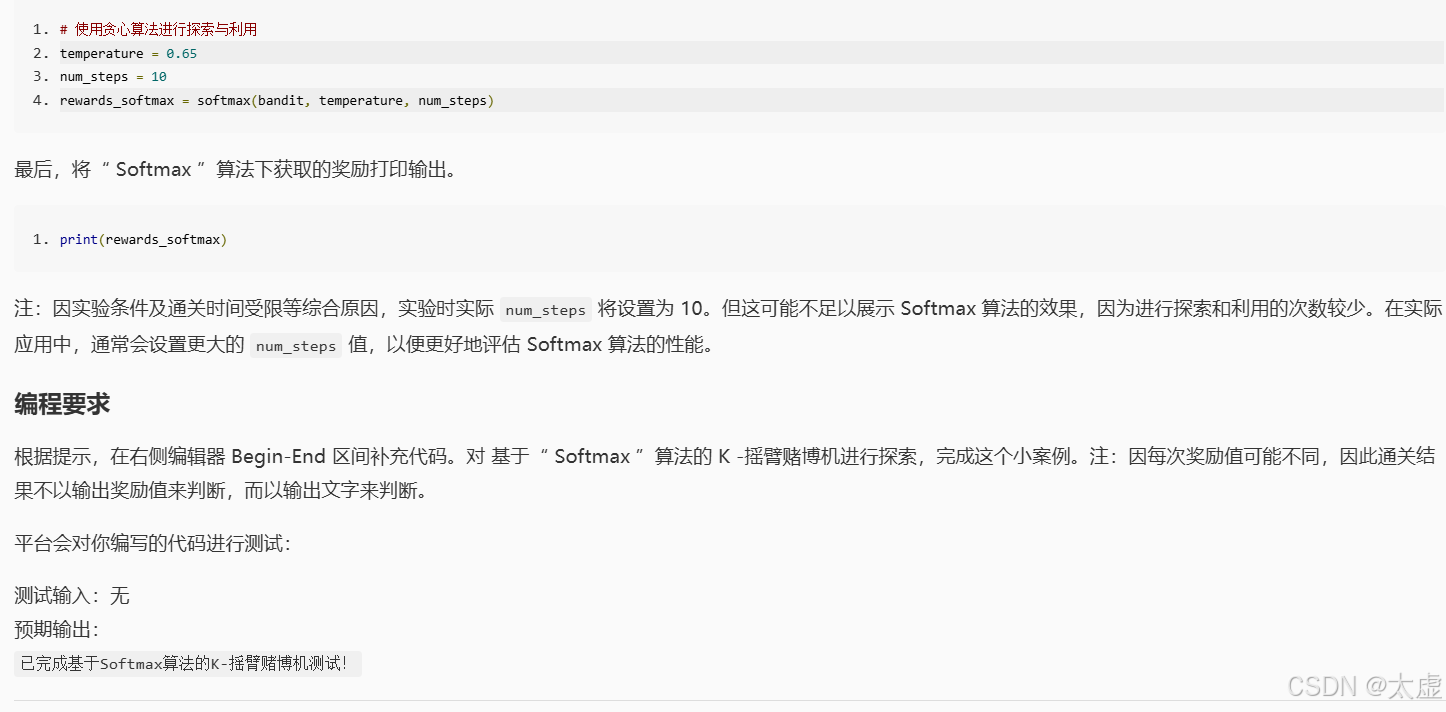
# 使用Softmax算法进行探索与利用
temperature = 0.65
num_steps = 10
rewards_softmax = softmax(bandit, temperature, num_steps)
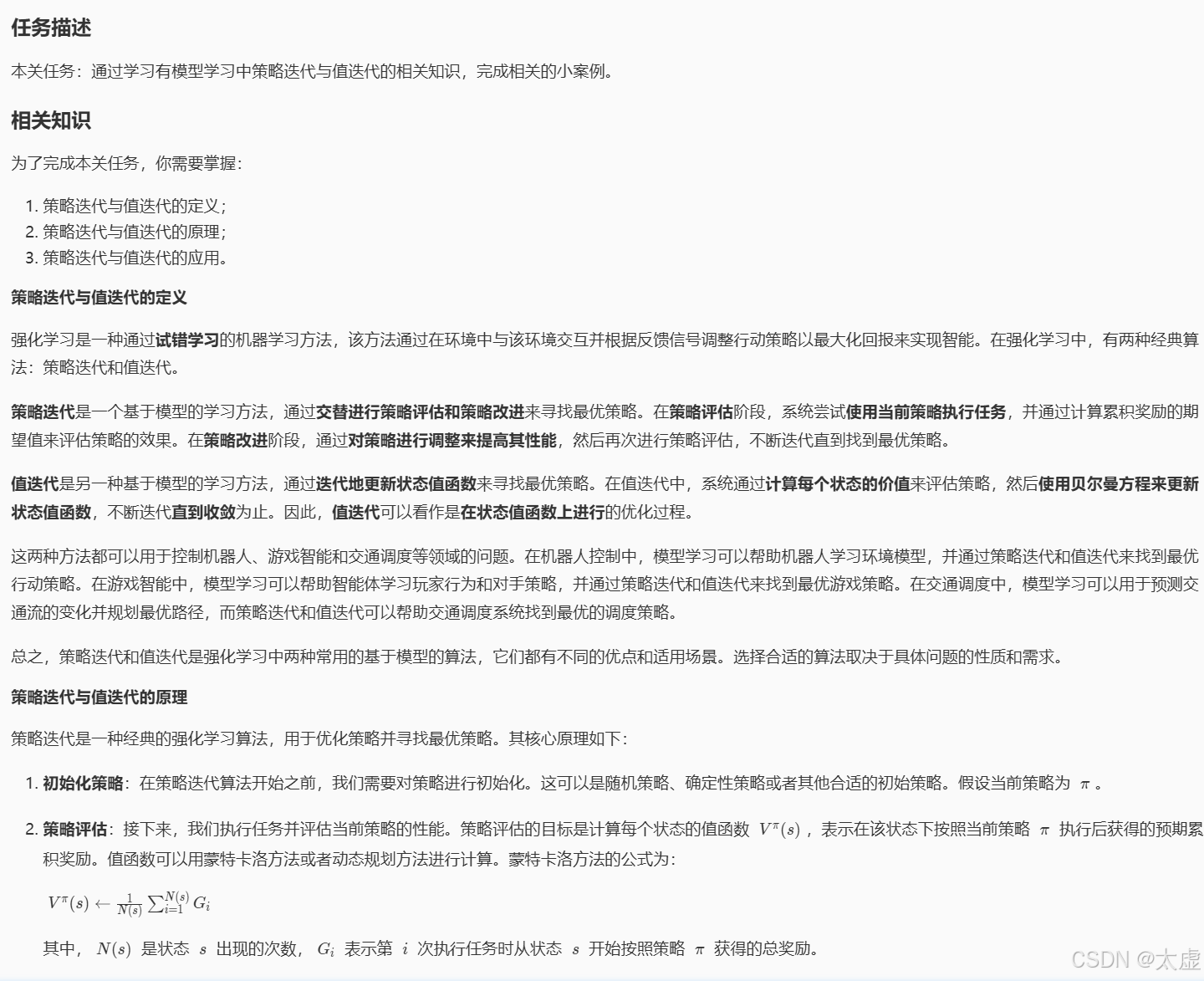
五、有模型学习
1.策略评估

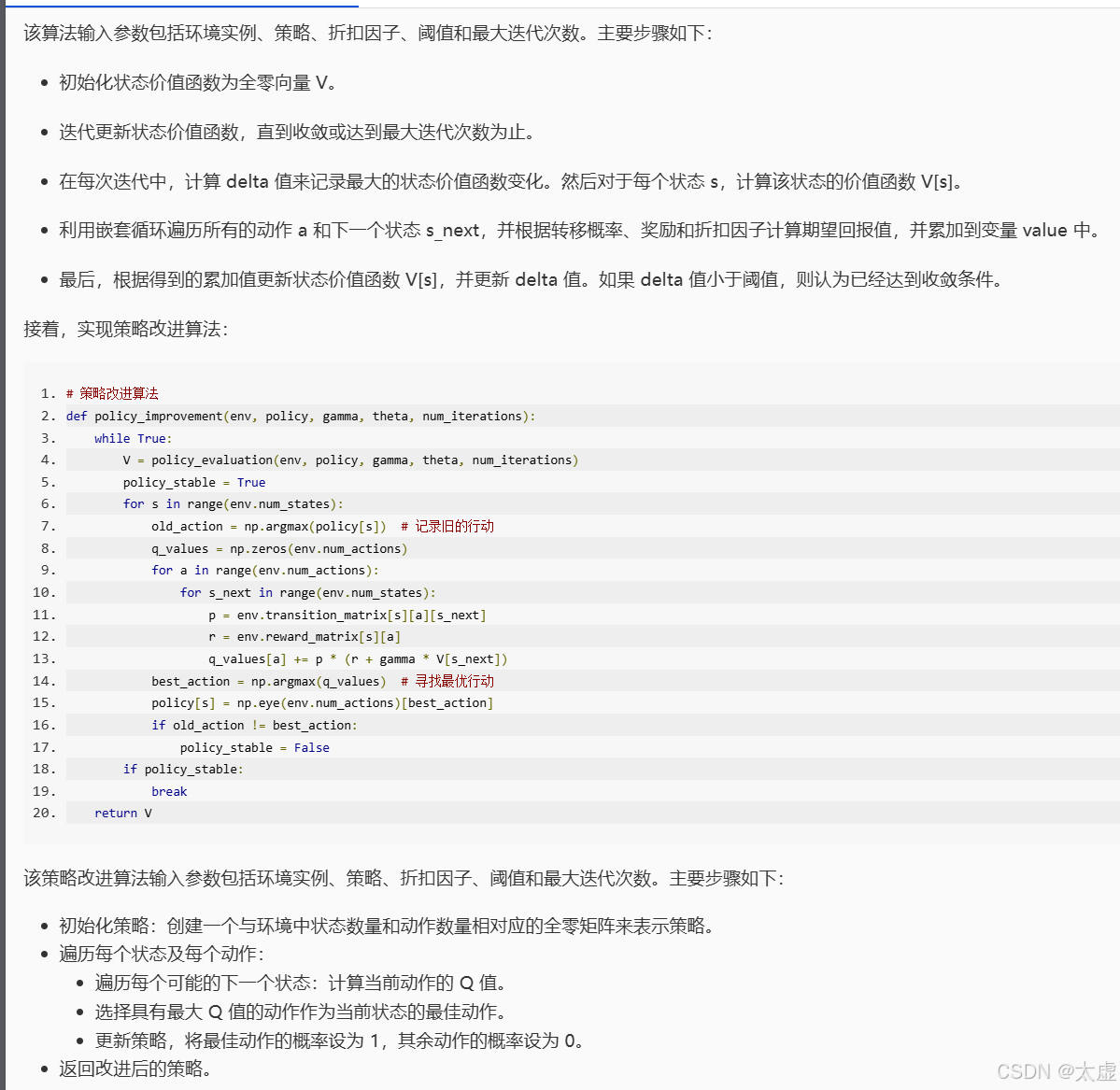
2.策略改进

import numpy as np
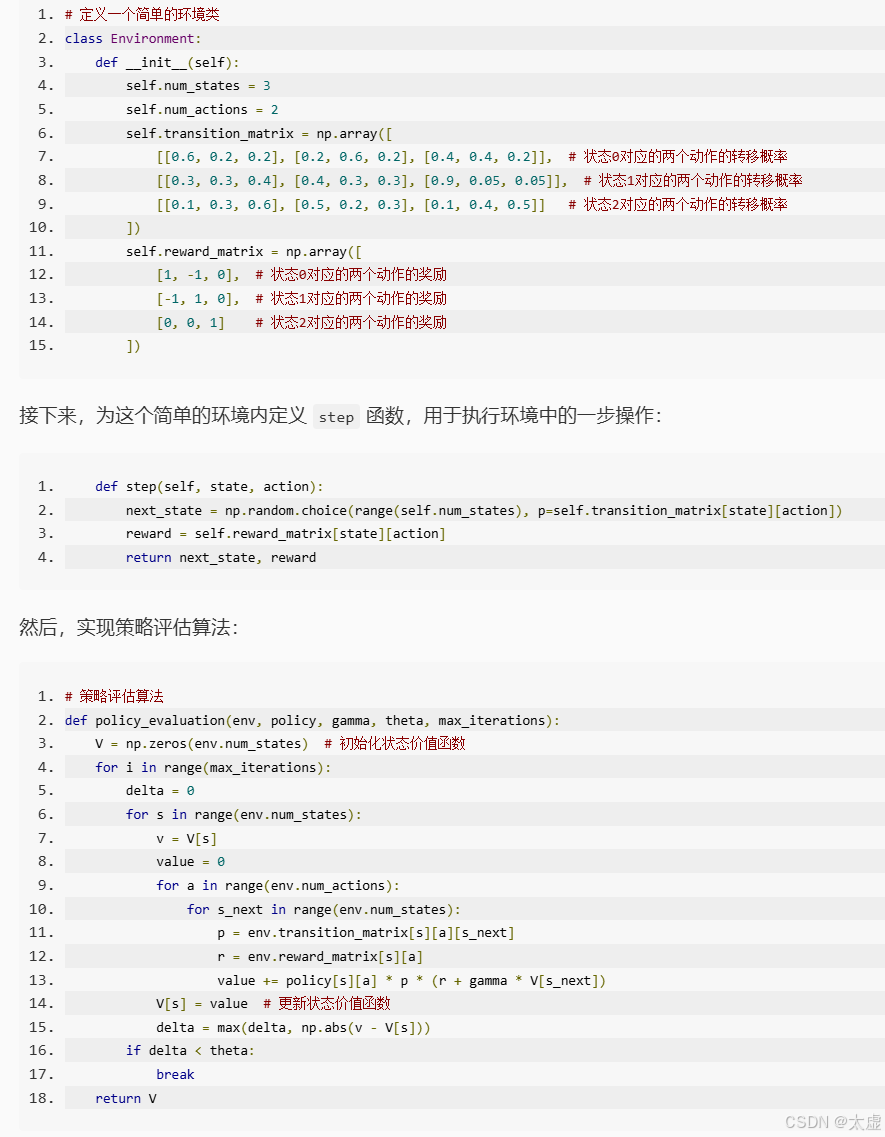
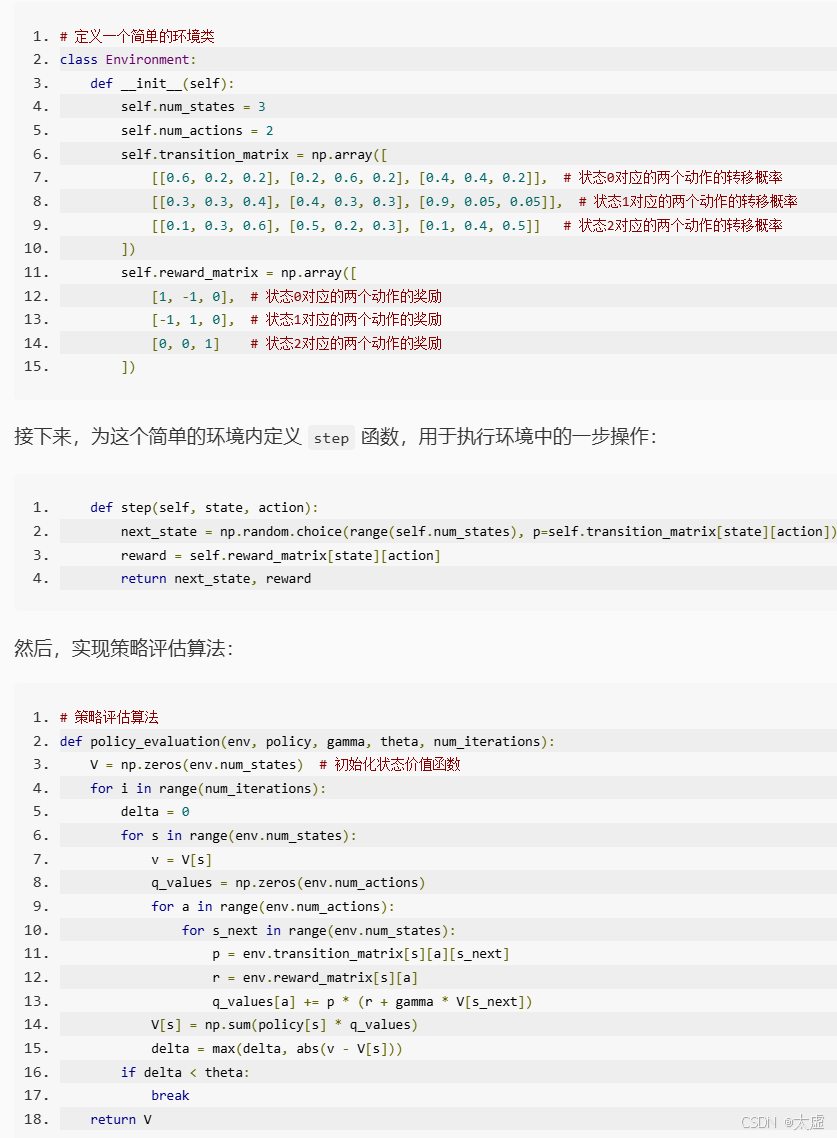
# 定义一个简单的环境类
class Environment:
def __init__(self):
self.num_states = 3
self.num_actions = 2
self.transition_matrix = np.array([
[[0.6, 0.2, 0.2], [0.2, 0.6, 0.2], [0.4, 0.4, 0.2]], # 状态0对应的两个动作的转移概率
[[0.3, 0.3, 0.4], [0.4, 0.3, 0.3], [0.9, 0.05, 0.05]], # 状态1对应的两个动作的转移概率
[[0.1, 0.3, 0.6], [0.5, 0.2, 0.3], [0.1, 0.4, 0.5]] # 状态2对应的两个动作的转移概率
])
self.reward_matrix = np.array([
[1, -1, 0], # 状态0对应的两个动作的奖励
[-1, 1, 0], # 状态1对应的两个动作的奖励
[0, 0, 1] # 状态2对应的两个动作的奖励
])
def step(self, state, action):
next_state = np.random.choice(range(self.num_states), p=self.transition_matrix[state][action])
reward = self.reward_matrix[state][action]
return next_state, reward
# 策略评估算法
def policy_evaluation(env, policy, gamma, theta, num_iterations):
V = np.zeros(env.num_states) # 初始化状态价值函数
for i in range(num_iterations):
delta = 0
for s in range(env.num_states):
v = V[s]
q_values = np.zeros(env.num_actions)
for a in range(env.num_actions):
for s_next in range(env.num_states):
p = env.transition_matrix[s][a][s_next]
r = env.reward_matrix[s][a]
q_values[a] += p * (r + gamma * V[s_next])
V[s] = np.sum(policy[s] * q_values)
delta = max(delta, abs(v - V[s]))
if delta < theta:
break
return V
# 请在下面的 Begin-End 之间按照注释中给出的提示编写正确的代码
########## Begin ##########
# 策略改进算法
# 策略改进算法
def policy_improvement(env, policy, gamma, theta, num_iterations):
while True:
V = policy_evaluation(env, policy, gamma, theta, num_iterations)
policy_stable = True
for s in range(env.num_states):
old_action = np.argmax(policy[s]) # 记录旧的行动
q_values = np.zeros(env.num_actions)
for a in range(env.num_actions):
for s_next in range(env.num_states):
p = env.transition_matrix[s][a][s_next]
r = env.reward_matrix[s][a]
q_values[a] += p * (r + gamma * V[s_next])
best_action = np.argmax(q_values) # 寻找最优行动
policy[s] = np.eye(env.num_actions)[best_action]
if old_action != best_action:
policy_stable = False
if policy_stable:
break
return V
########## End ##########
# 创建一个环境实例
env = Environment()
# 初始化一个随机策略
policy = np.ones((env.num_states, env.num_actions)) / env.num_actions
# 使用策略改进算法优化策略
gamma = 0.9 # 折扣因子
theta = 1e-8 # 收敛阈值
num_iterations = 1000 # 最大迭代次数
v = policy_improvement(env, policy, gamma, theta, num_iterations)
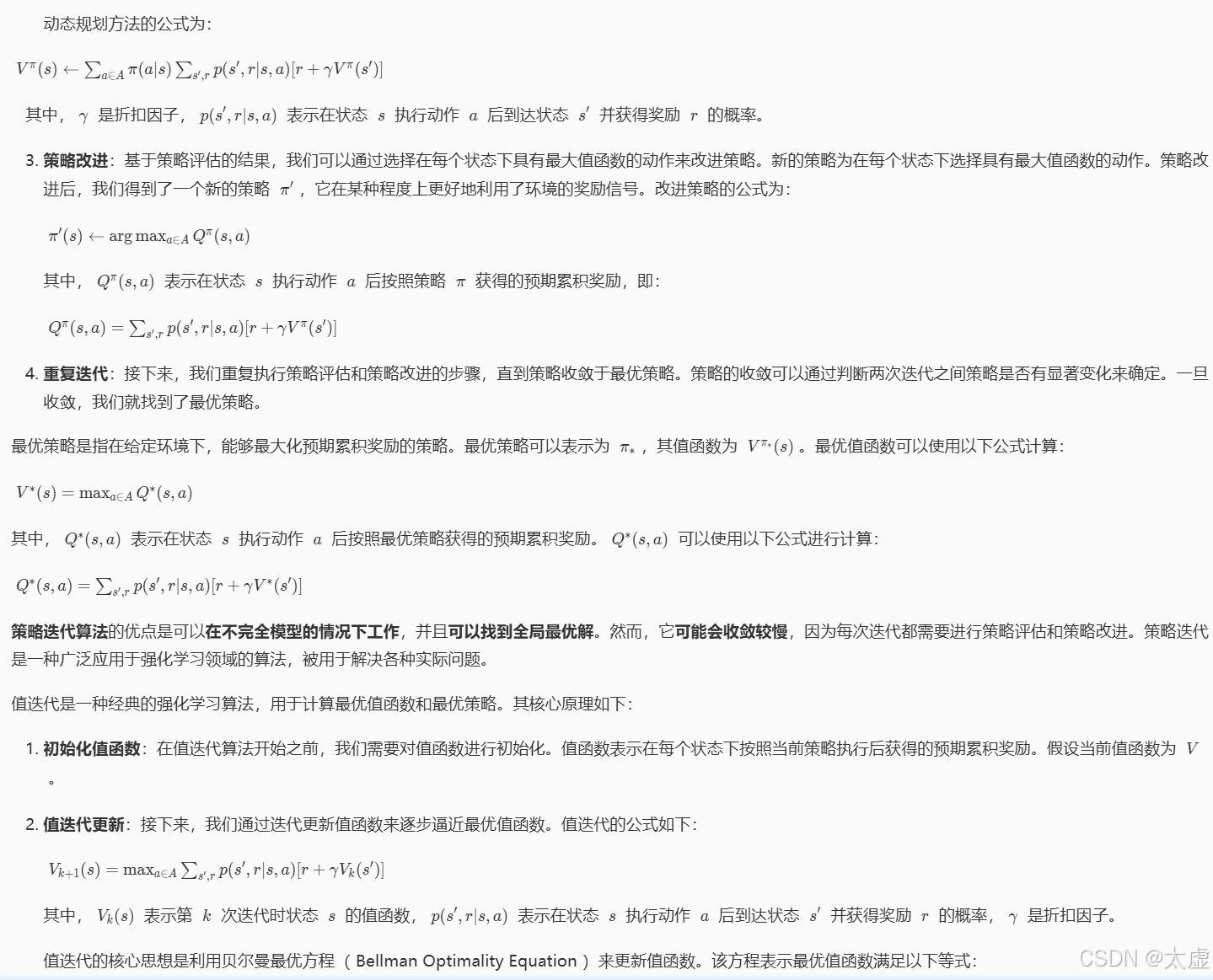
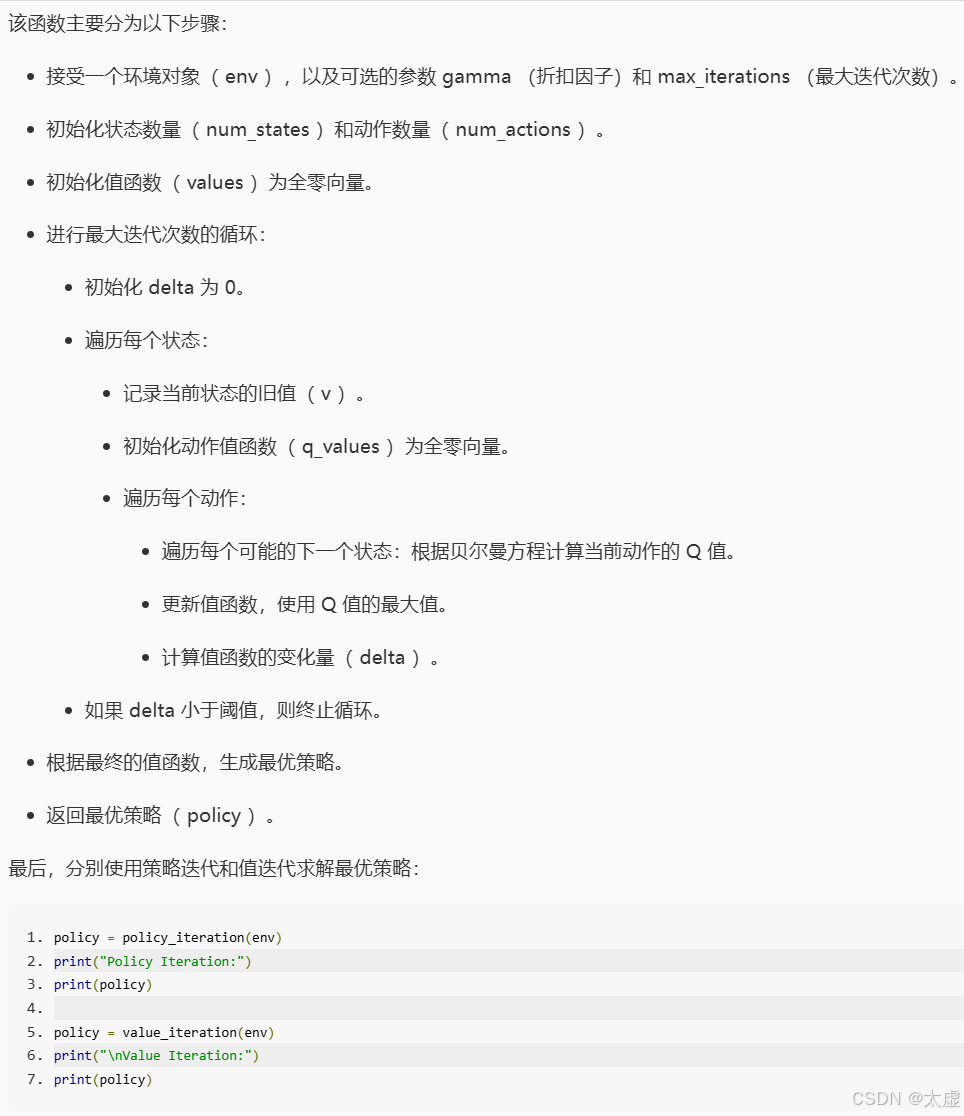
3.策略迭代与值迭代
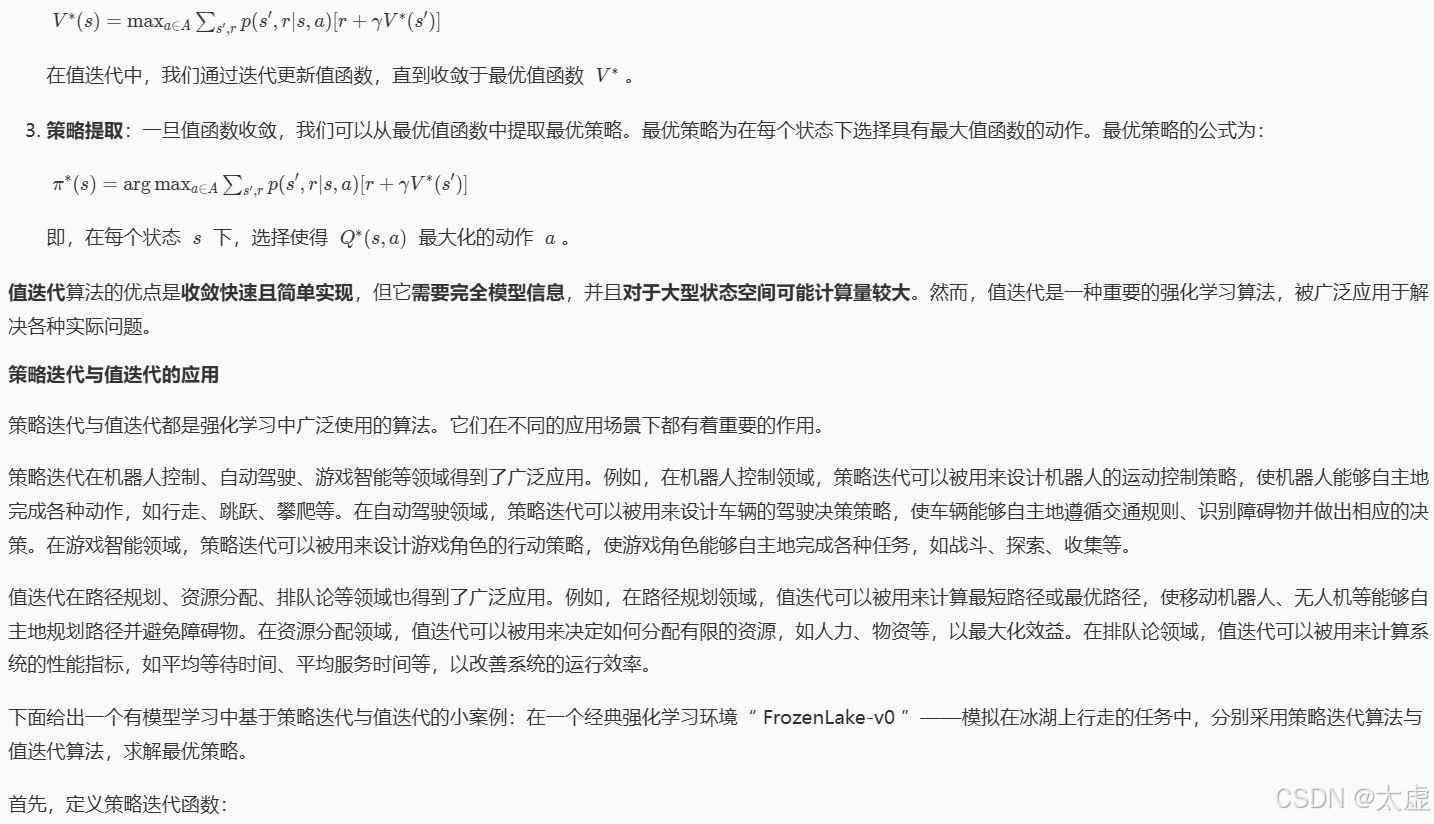

import gym
import numpy as np
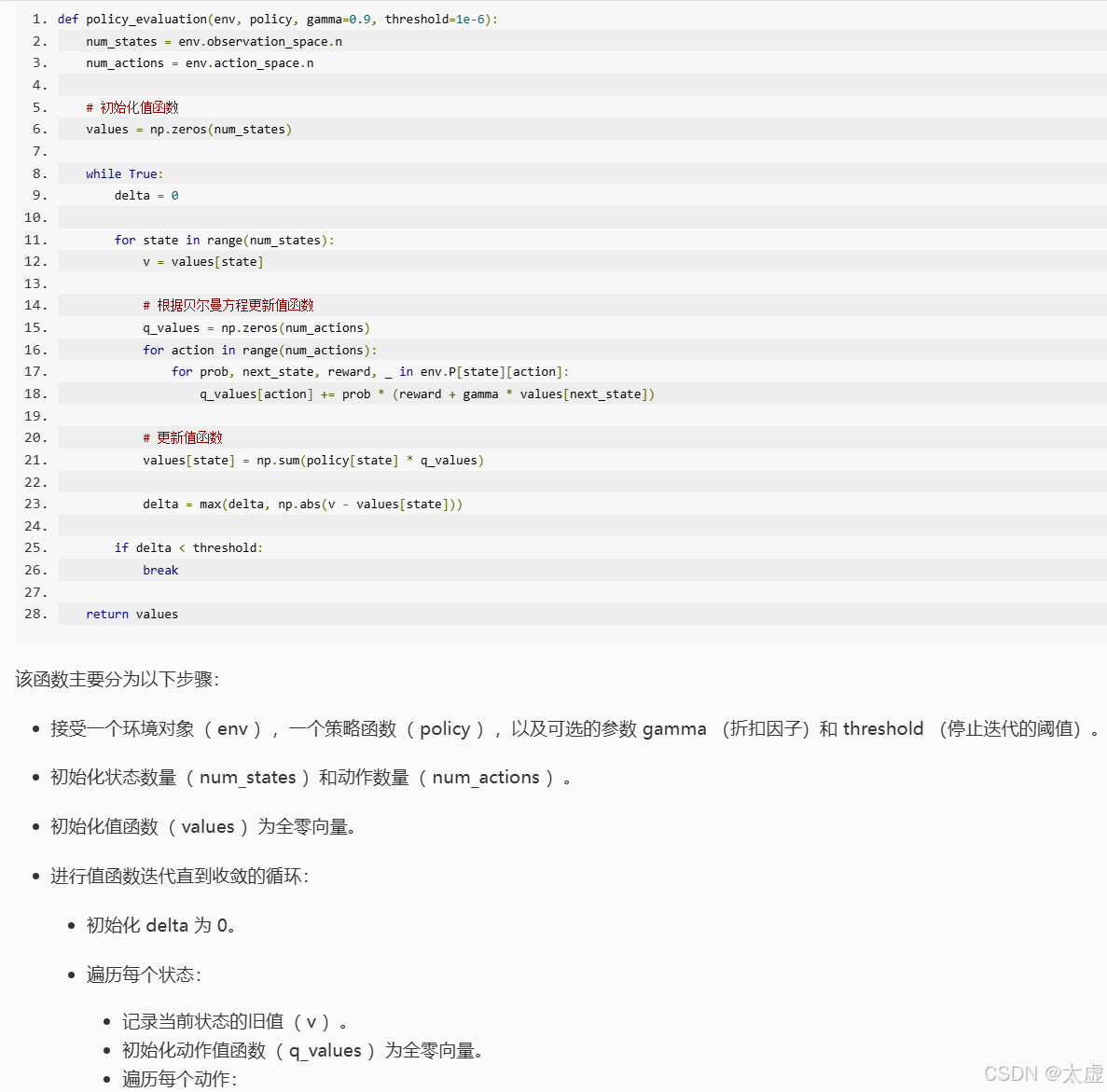
def policy_evaluation(env, policy, gamma=0.9, threshold=1e-6):
num_states = env.observation_space.n
num_actions = env.action_space.n
# 初始化值函数
values = np.zeros(num_states)
while True:
delta = 0
for state in range(num_states):
v = values[state]
# 根据贝尔曼方程更新值函数
q_values = np.zeros(num_actions)
for action in range(num_actions):
for prob, next_state, reward, _ in env.P[state][action]:
q_values[action] += prob * (reward + gamma * values[next_state])
# 更新值函数
values[state] = np.sum(policy[state] * q_values)
delta = max(delta, np.abs(v - values[state]))
if delta < threshold:
break
return values
# 请在下面的 Begin-End 之间按照注释中给出的提示编写正确的代码
########## Begin ##########
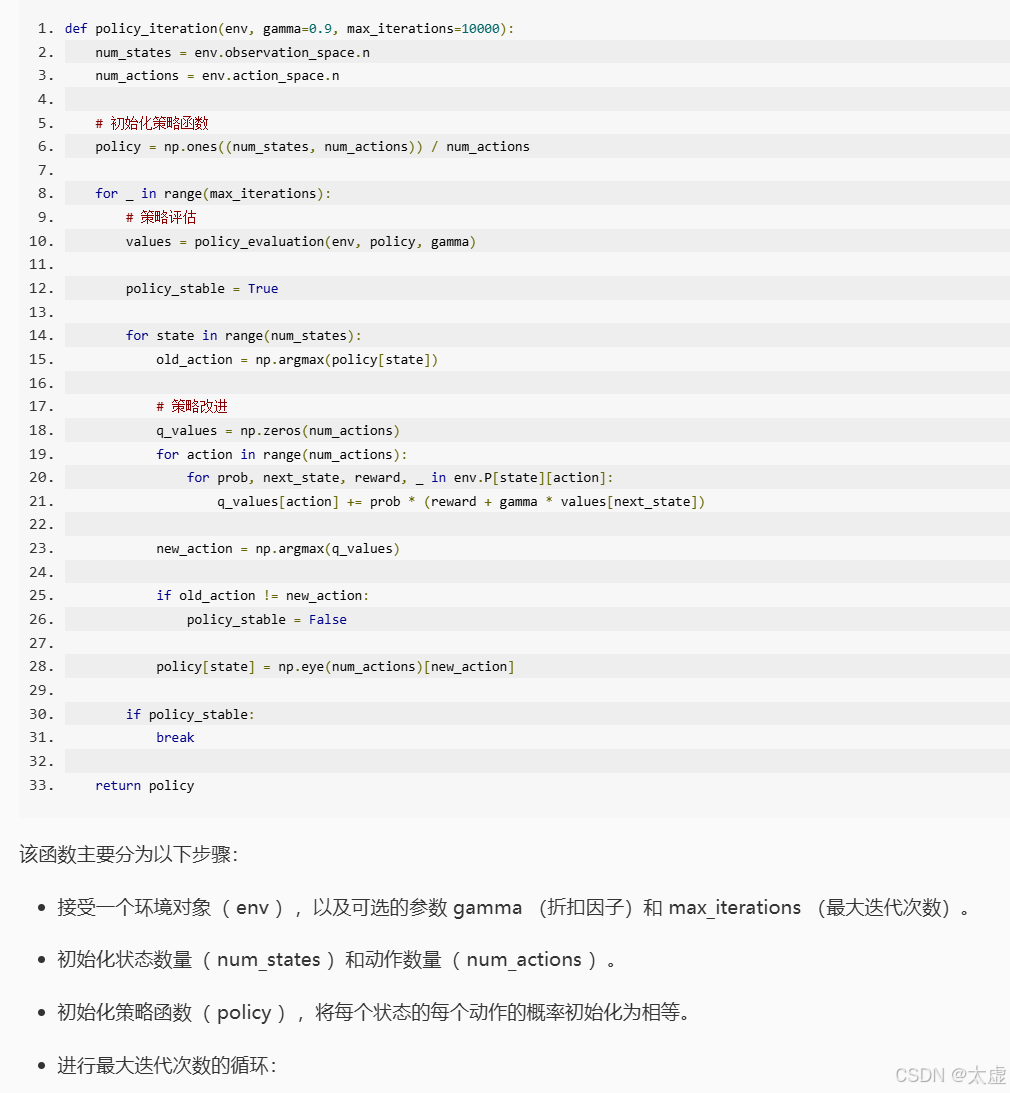
def policy_iteration(env, gamma=0.9, max_iterations=10000):
num_states = env.observation_space.n
num_actions = env.action_space.n
# 初始化策略函数
policy = np.ones((num_states, num_actions)) / num_actions
for _ in range(max_iterations):
# 策略评估
values = policy_evaluation(env, policy, gamma)
policy_stable = True
for state in range(num_states):
old_action = np.argmax(policy[state])
# 策略改进
q_values = np.zeros(num_actions)
for action in range(num_actions):
for prob, next_state, reward, _ in env.P[state][action]:
q_values[action] += prob * (reward + gamma * values[next_state])
new_action = np.argmax(q_values)
if old_action != new_action:
policy_stable = False
policy[state] = np.eye(num_actions)[new_action]
if policy_stable:
break
return policy
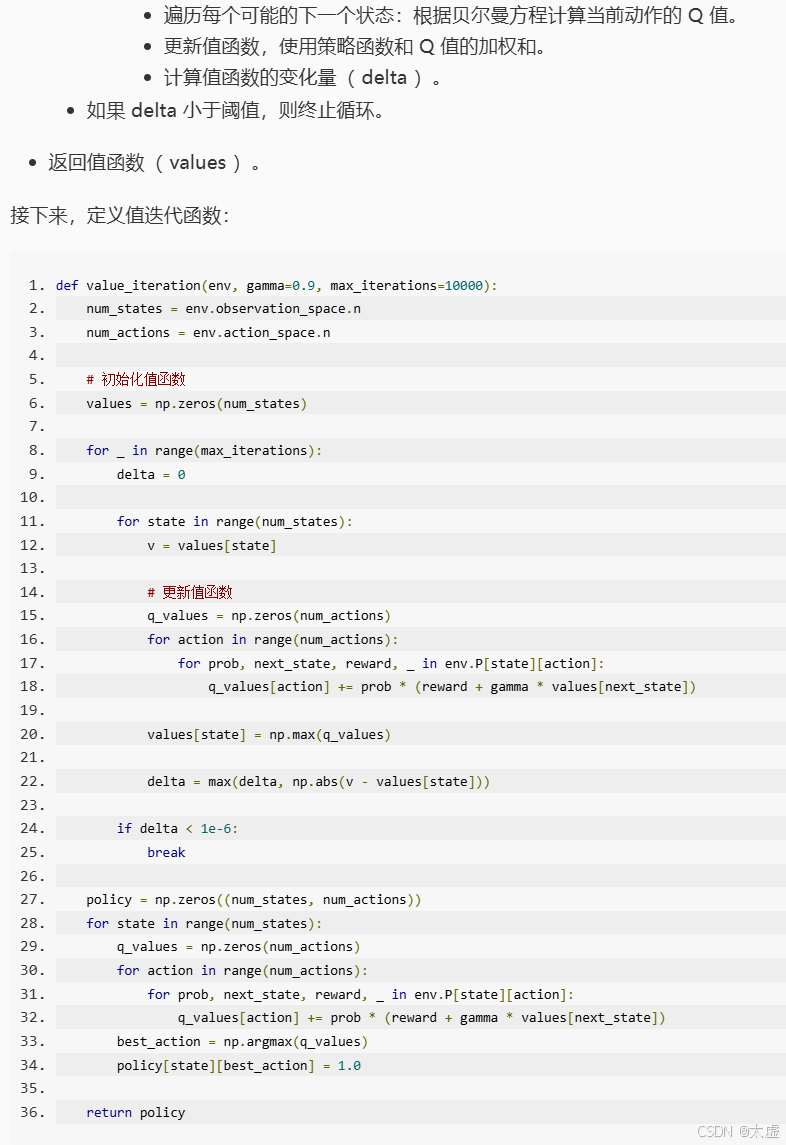
def value_iteration(env, gamma=0.9, max_iterations=10000):
num_states = env.observation_space.n
num_actions = env.action_space.n
# 初始化值函数
values = np.zeros(num_states)
for _ in range(max_iterations):
delta = 0
for state in range(num_states):
# 第六步:记录当前状态的旧值
# 更新值函数
q_values = np.zeros(num_actions)
for action in range(num_actions):
for prob, next_state, reward, _ in env.P[state][action]:
q_values[action] += prob * (reward + gamma * values[next_state])
# 第七步:使用Q值的最大值更新值函数
# 第八步:计算值函数的变化量
if delta < 1e-6:
break
# 根据最终的值函数,生成最优策略
policy = np.zeros((num_states, num_actions))
for state in range(num_states):
q_values = np.zeros(num_actions)
for action in range(num_actions):
for prob, next_state, reward, _ in env.P[state][action]:
q_values[action] += prob * (reward + gamma * values[next_state])
best_action = np.argmax(q_values)
policy[state][best_action] = 1.0
return values
########## End ##########
env = gym.make('FrozenLake-v0')
# 使用策略迭代
v1 = policy_iteration(env)
# 使用值迭代
v2 = value_iteration(env)
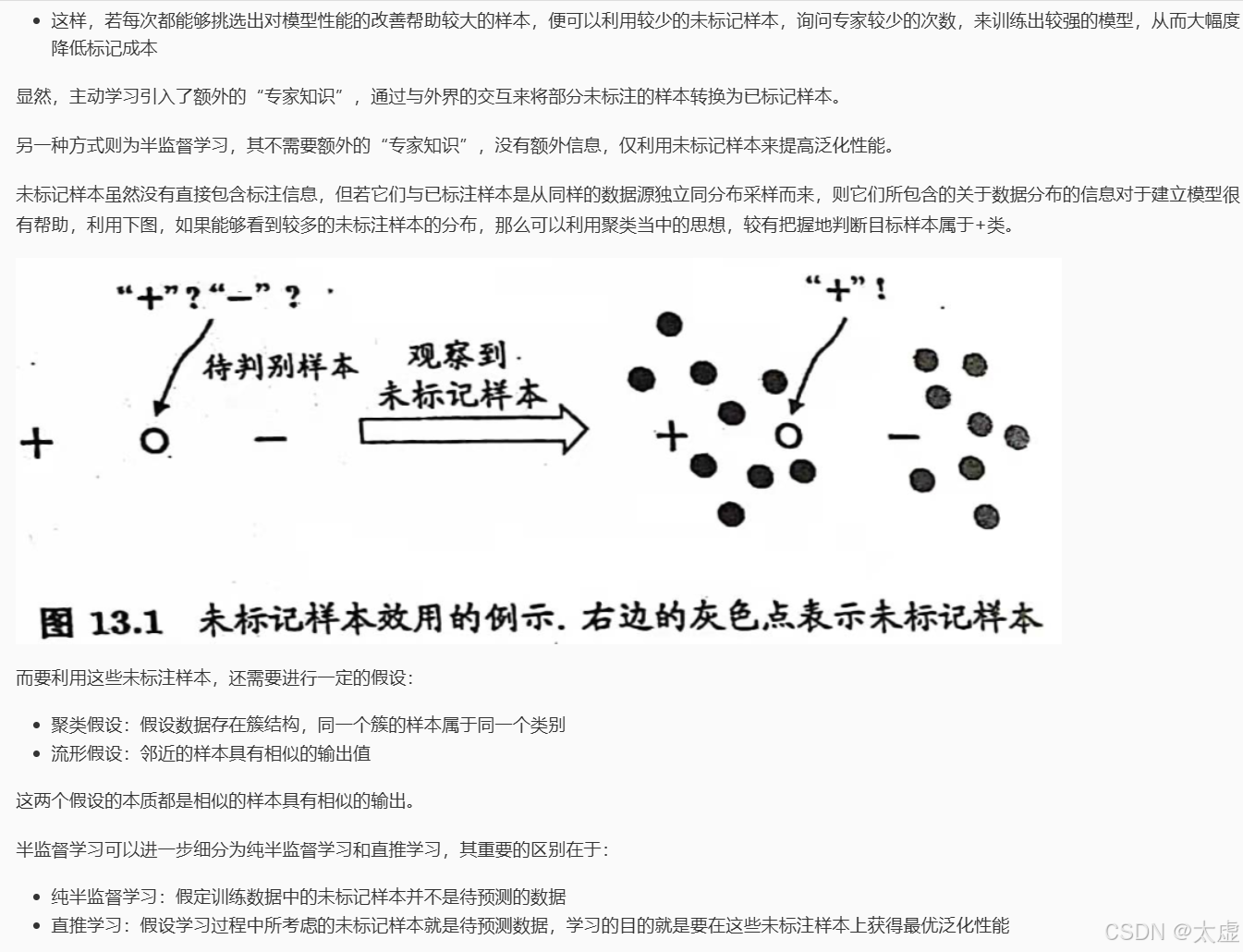
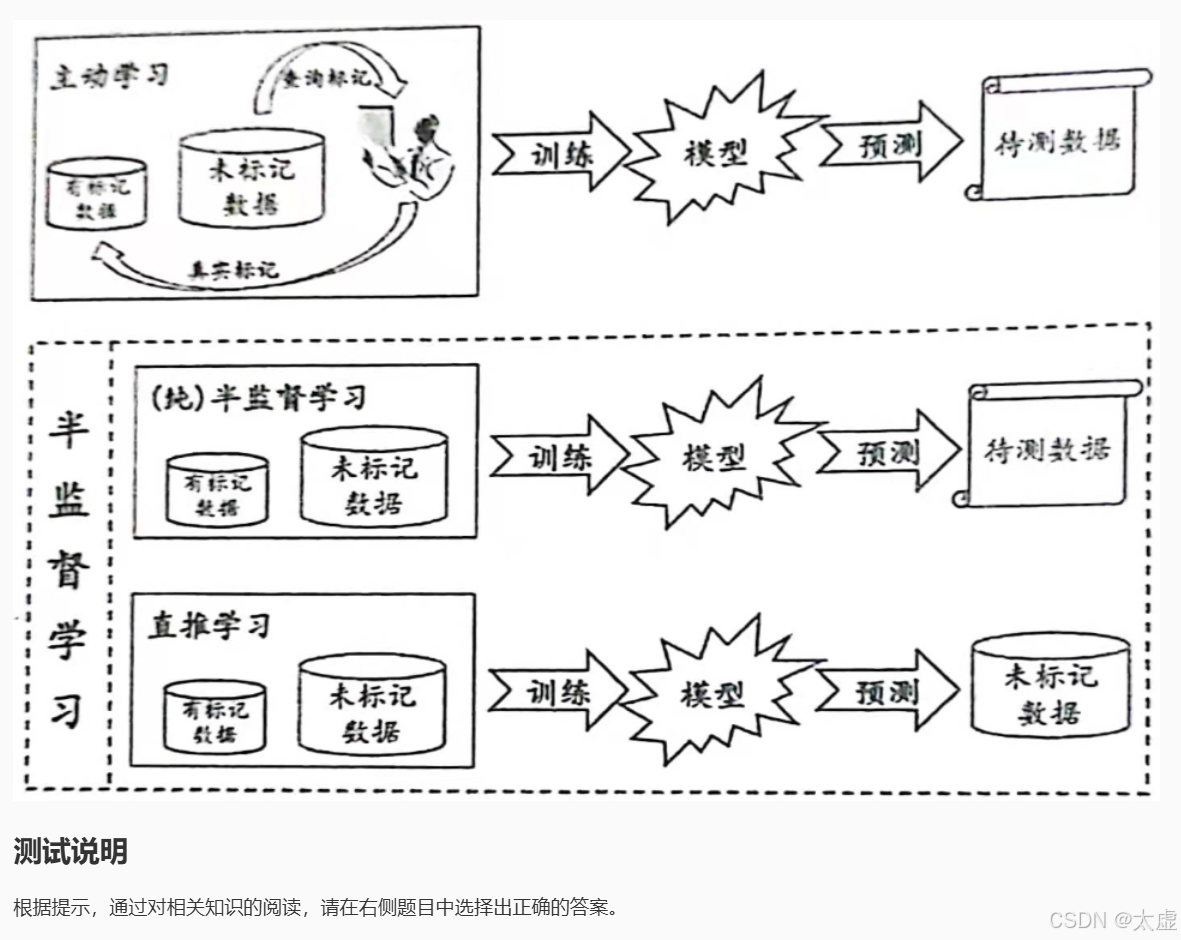
六、未标记样本
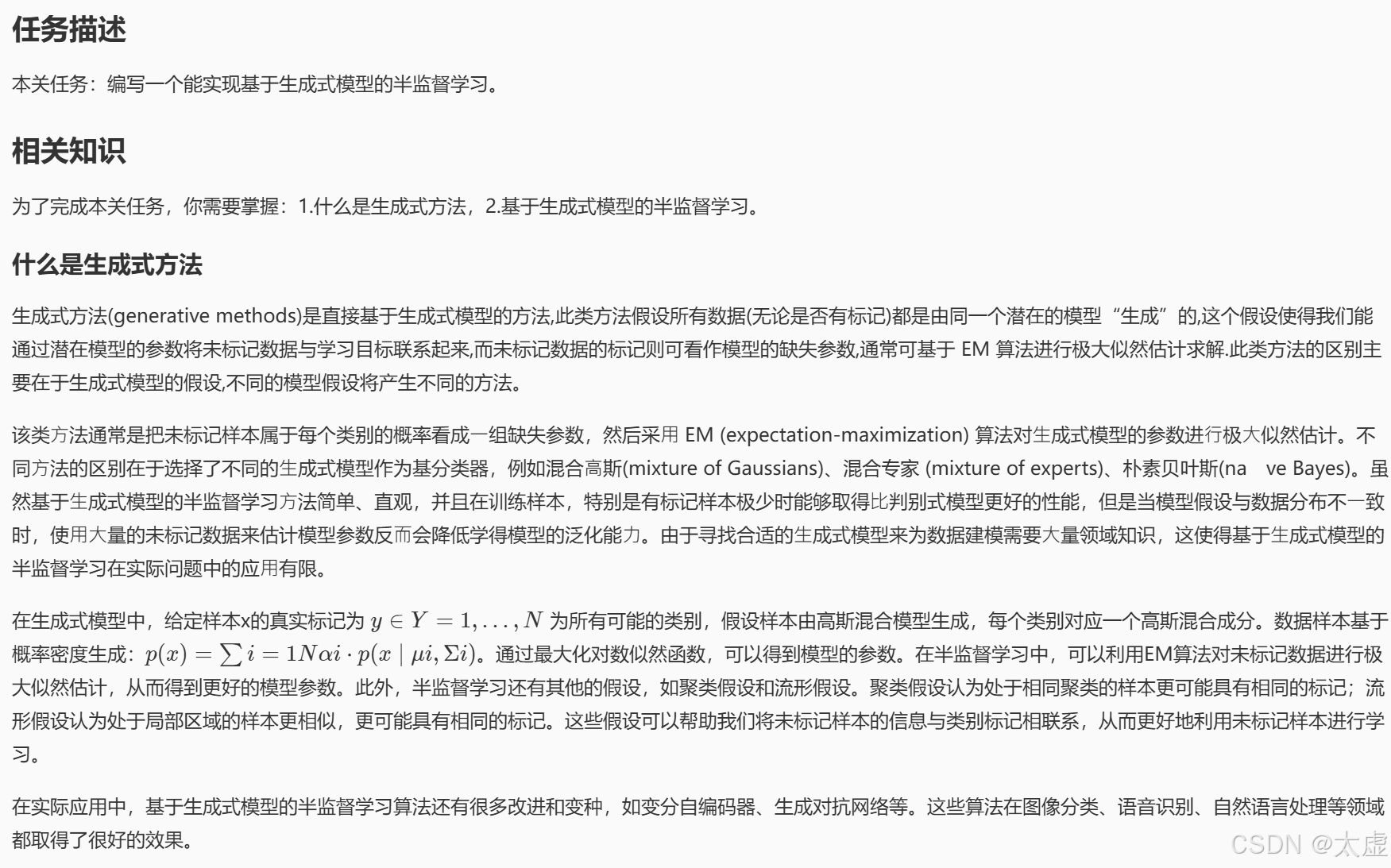
七、 生成式方法

import numpy as np
from sklearn.datasets import make_classification
from sklearn.semi_supervised import LabelSpreading
from sklearn.model_selection import train_test_split
# ********** Begin **********#
# 生成模拟数据集,生成了一个包含2000个样本和20个特征的数据集,其中只有2个特征是有信息的,10个特征是冗余的,随机种子是42。
X, y = make_classification(n_samples=2000, n_features=20, n_informative=2, n_redundant=10, random_state=42)
# ********** End **********#
# 将数据集划分为训练集和测试集
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42)
# 初始化模型
lp_model = LabelSpreading(kernel="knn", alpha=0.8)
# 使用有标签数据进行训练
lp_model.fit(X_train, y_train)
# 预测未标记数据的标签
y_pred = lp_model.predict(X_test)
# 输出准确率
print("Accuracy:", np.mean(y_pred == y_test))
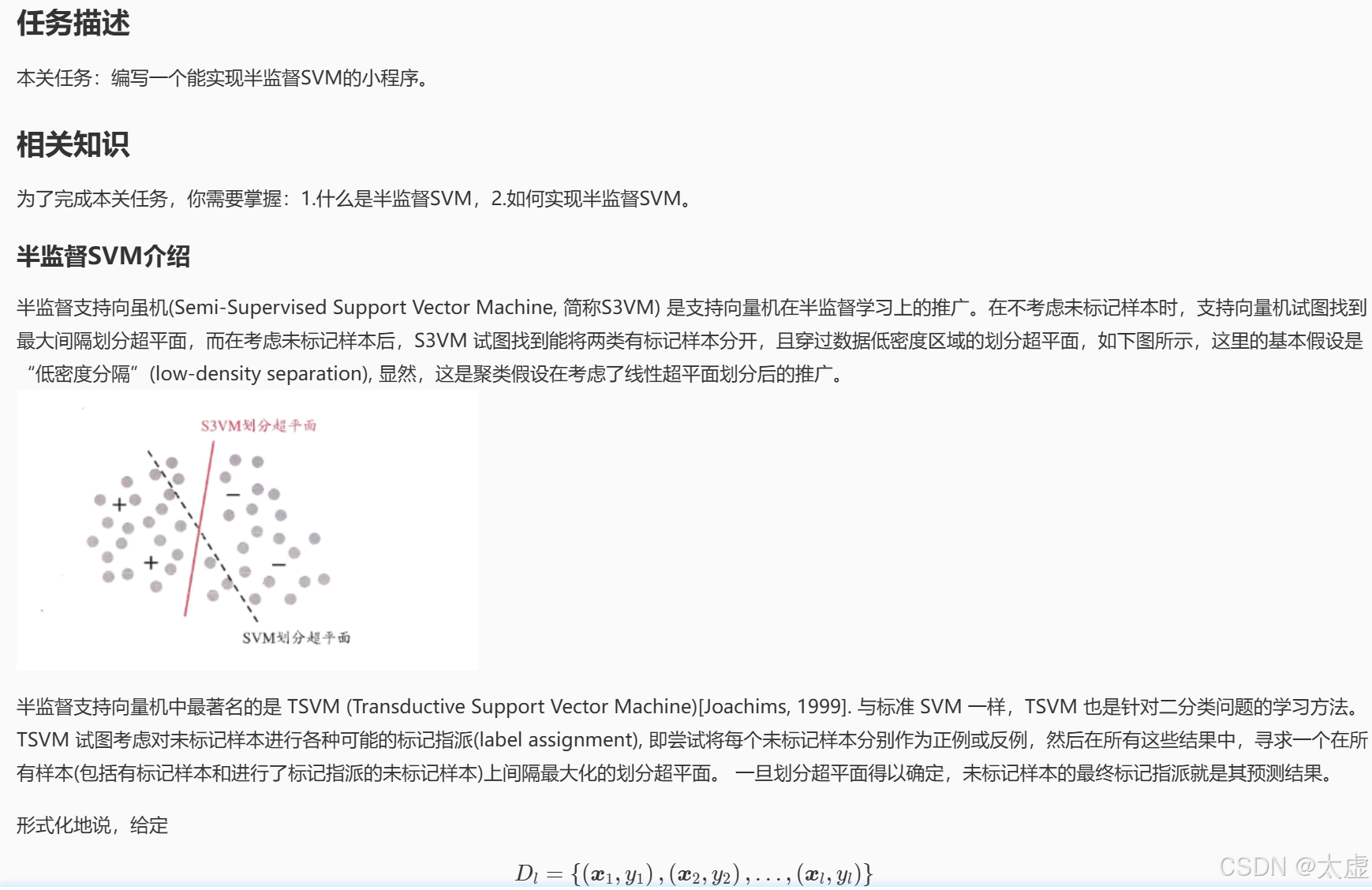
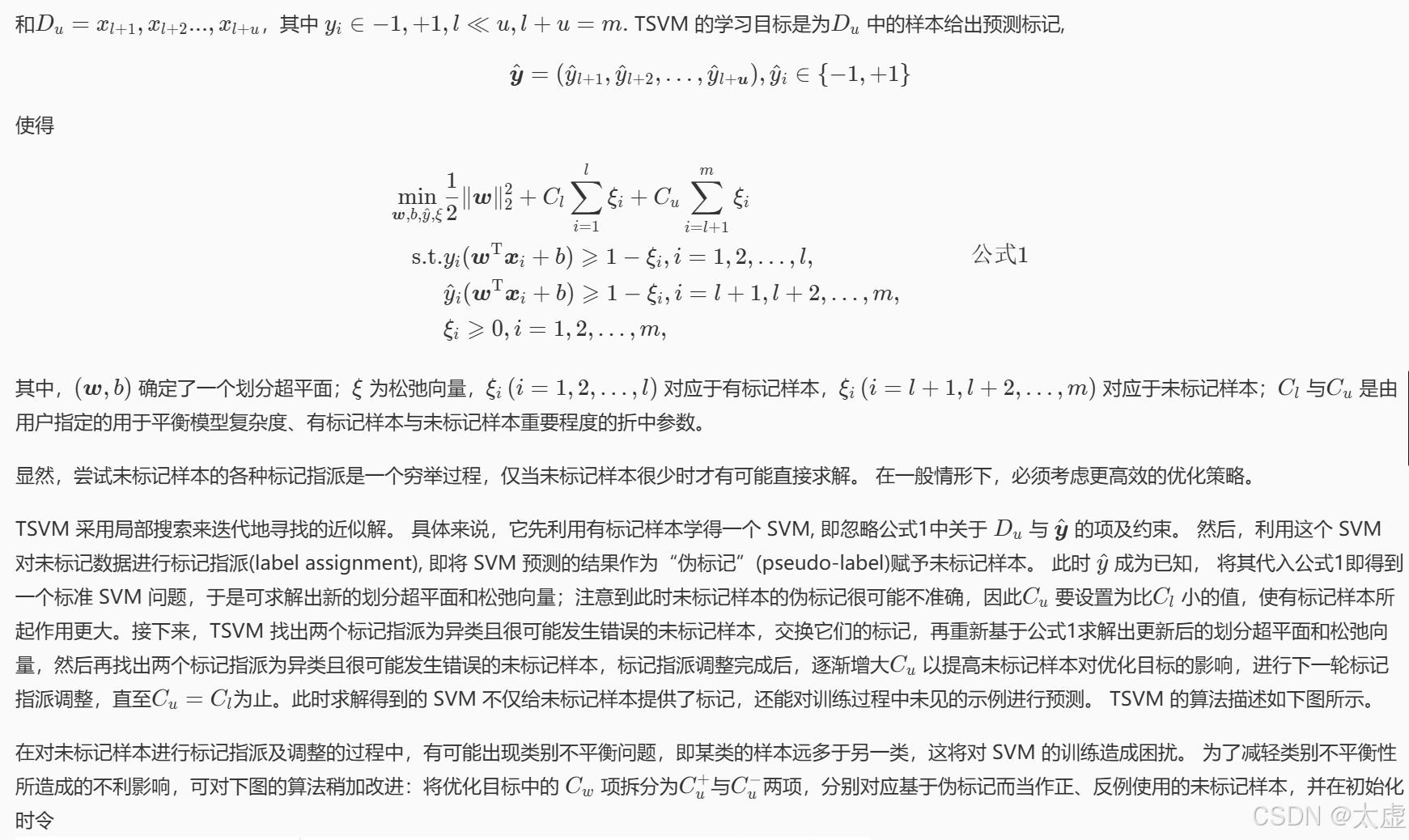
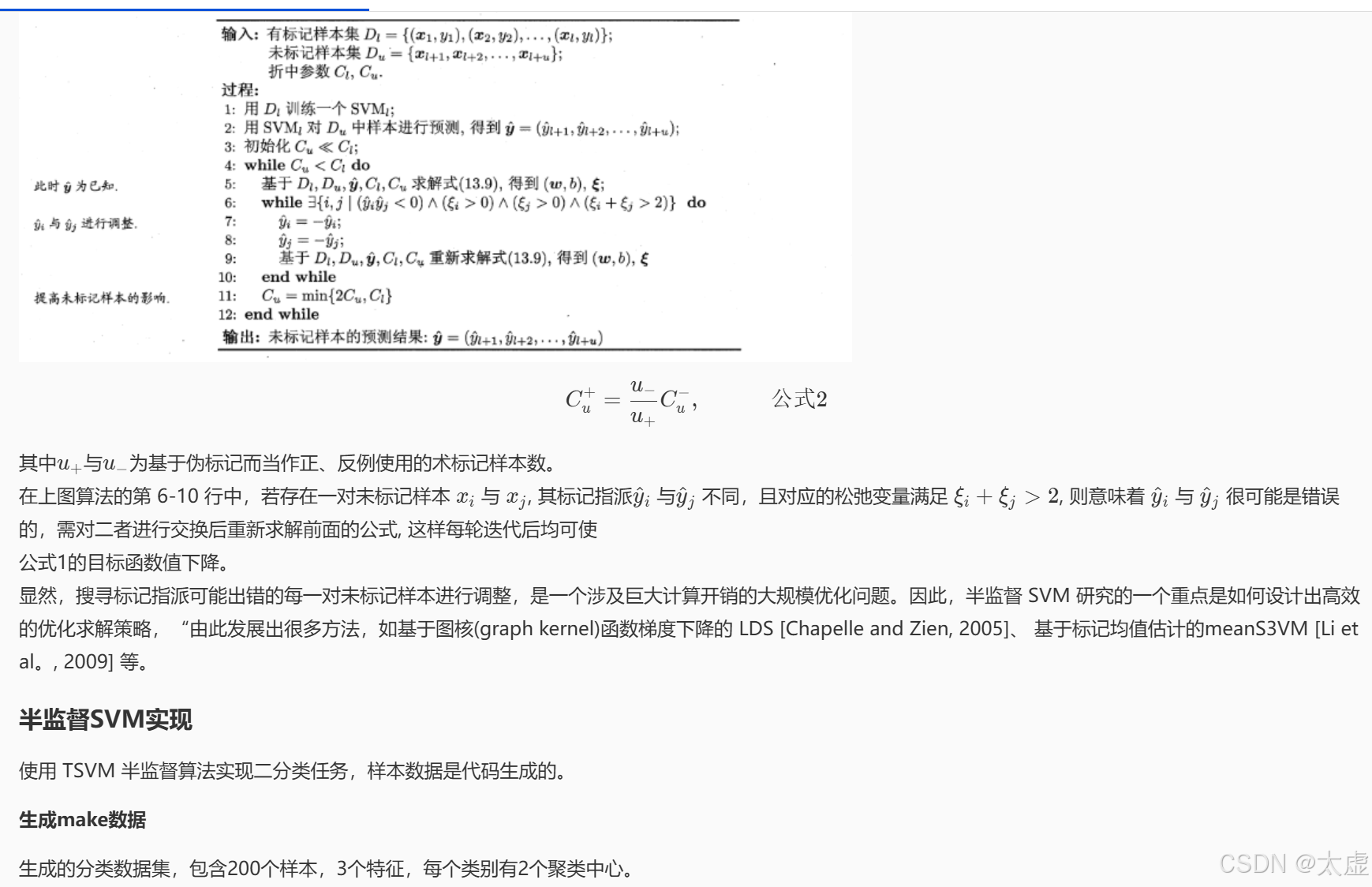
八、半监督SVM

import random
import numpy as np
import sklearn.svm as svm
from sklearn.datasets import make_classification
import joblib
import warnings
np.random.seed(1477)
random.seed(1477)
warnings.filterwarnings(action='ignore')
class TSVM(object):
def __init__(self, kernel='linear'):
self.Cl, self.Cu = 1.5, 0.001
self.kernel = kernel
self.clf = svm.SVC(C=1.5, kernel=self.kernel)
def train(self, X1, Y1, X2):
N = len(X1) + len(X2)
# 样本权值初始化
sample_weight = np.ones(N)
sample_weight[len(X1):] = self.Cu
# 用已标注部分训练出一个初始SVM
self.clf.fit(X1, Y1)
# 对未标记样本进行标记
#********* Begin *********#
Y2 =
Y2 =
X =
Y =
#********* End *********#
# 未标记样本的序号
Y2_id = np.arange(len(X2))
while self.Cu < self.Cl:
# 重新训练SVM, 之后再寻找易出错样本不断调整
self.clf.fit(X, Y, sample_weight=sample_weight)
while True:
Y2_decision = self.clf.decision_function(X2) # 参数实例到决策超平面的距离
Y2 = Y2.reshape(-1)
epsilon = 1 - Y2 * Y2_decision
negative_max_id = Y2_id[epsilon == min(epsilon)]
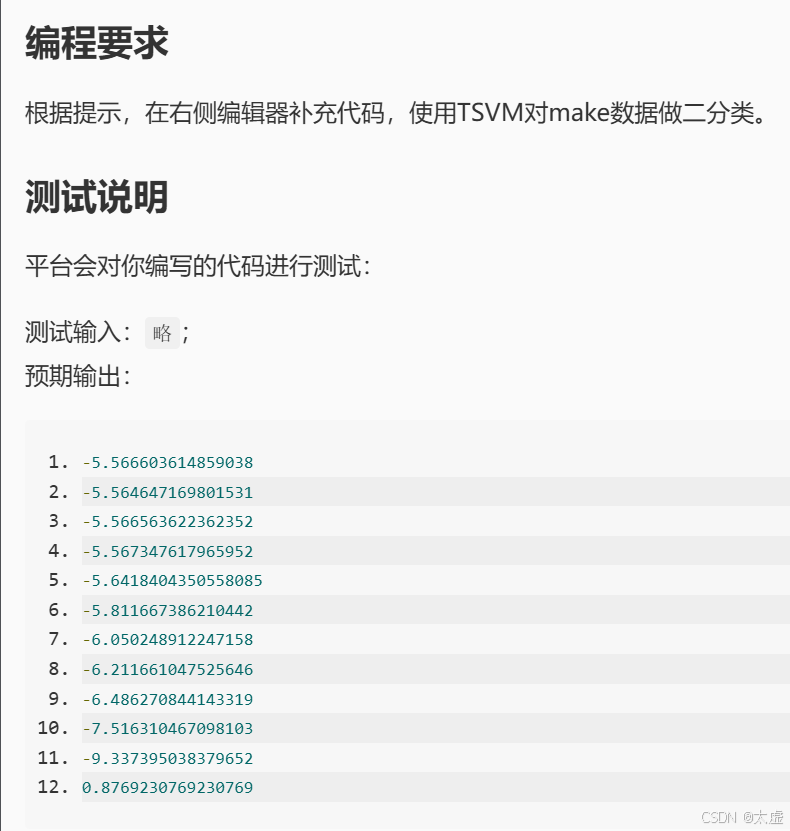
print(epsilon[negative_max_id][0])
if epsilon[negative_max_id][0] > 0:
#********* Begin *********#
# 寻找很可能错误的未标记样本,改变它的标记成其他标记
pool =
Y2[negative_max_id] =
Y2 =
Y =
self.clf.fit( )
#********* End *********#
else:
break
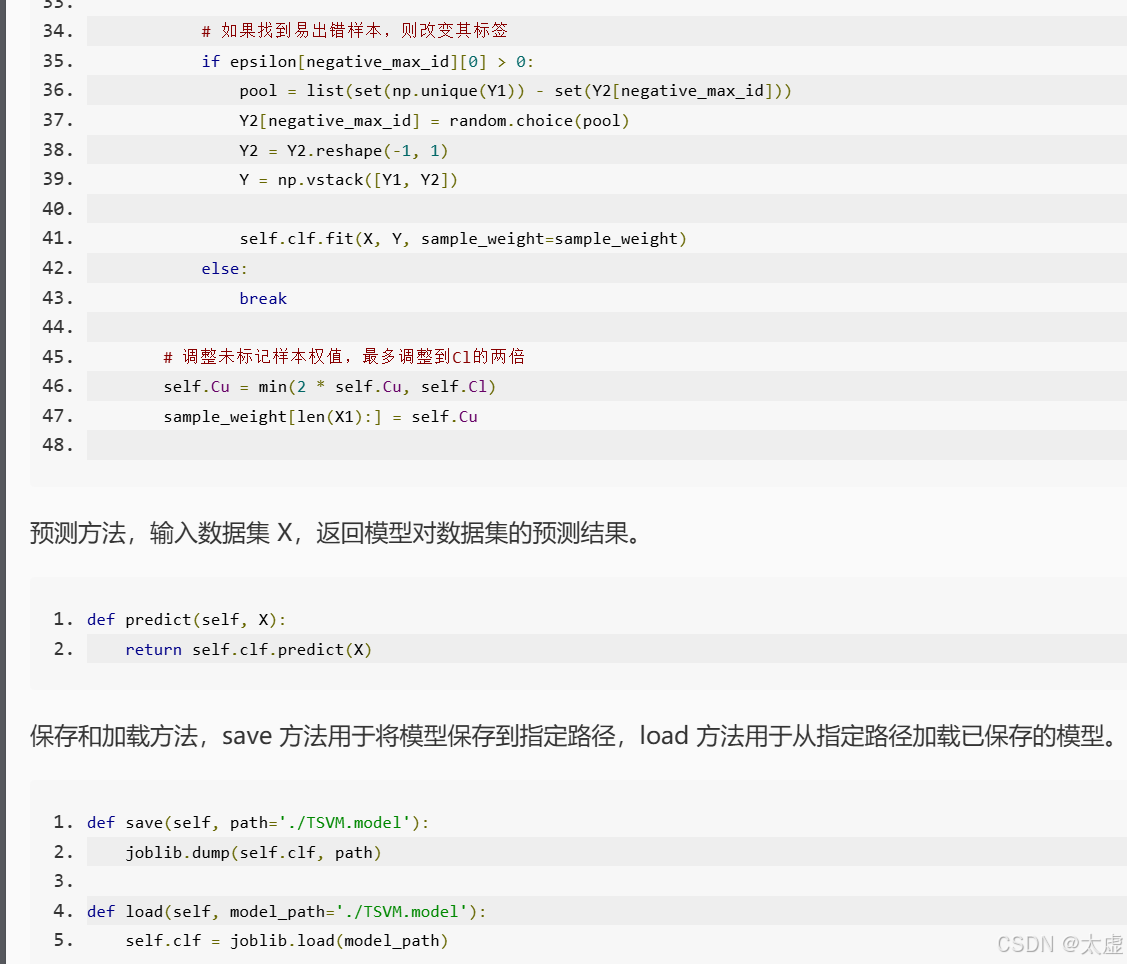
self.Cu = min(2 * self.Cu, self.Cl)
sample_weight[len(X1):] = self.Cu
def score(self, X, Y):
return self.clf.score(X, Y)
def predict(self, X):
return self.clf.predict(X)
def save(self, path='./TSVM.model'):
joblib.dump(self.clf, path)
def load(self, model_path='./TSVM.model'):
self.clf = joblib.load(model_path)
if __name__ == '__main__':
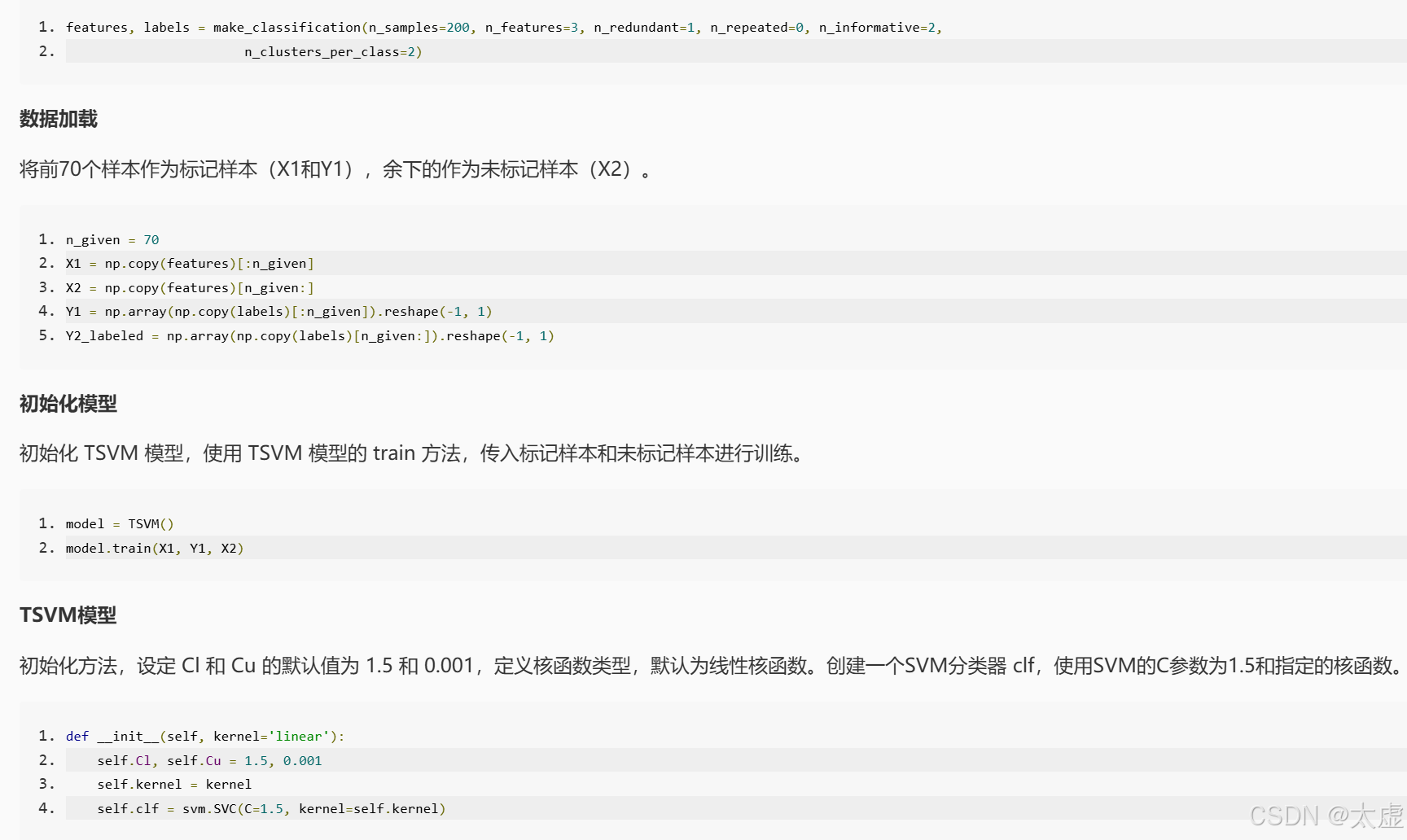
features, labels = make_classification(n_samples=200, n_features=3, n_redundant=1, n_repeated=0, n_informative=2,
n_clusters_per_class=2)
n_given = 70
# 取前n_given个数字作为标注集
X1 = np.copy(features)[:n_given]
X2 = np.copy(features)[n_given:]
Y1 = np.array(np.copy(labels)[:n_given]).reshape(-1, 1)
Y2_labeled = np.array(np.copy(labels)[n_given:]).reshape(-1, 1)
model = TSVM()
model.train(X1, Y1, X2)
# Y2_hat = model.predict(X2)
accuracy = model.score(X2, Y2_labeled)
print(accuracy)
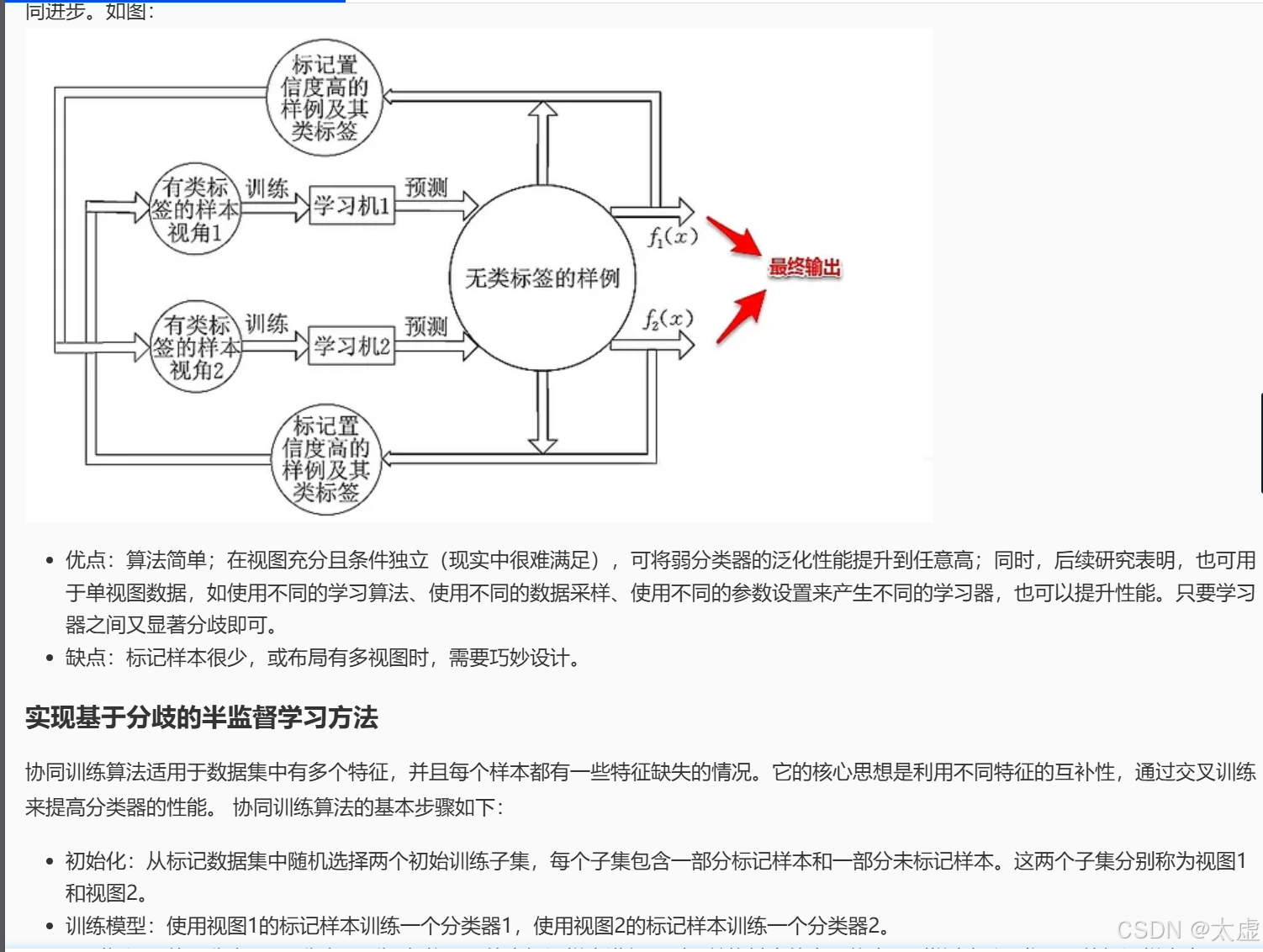
九、基于分歧的方法
from sklearn.datasets import load_iris
from sklearn.model_selection import train_test_split
from sklearn.svm import SVC
from sklearn.metrics import accuracy_score
import numpy as np
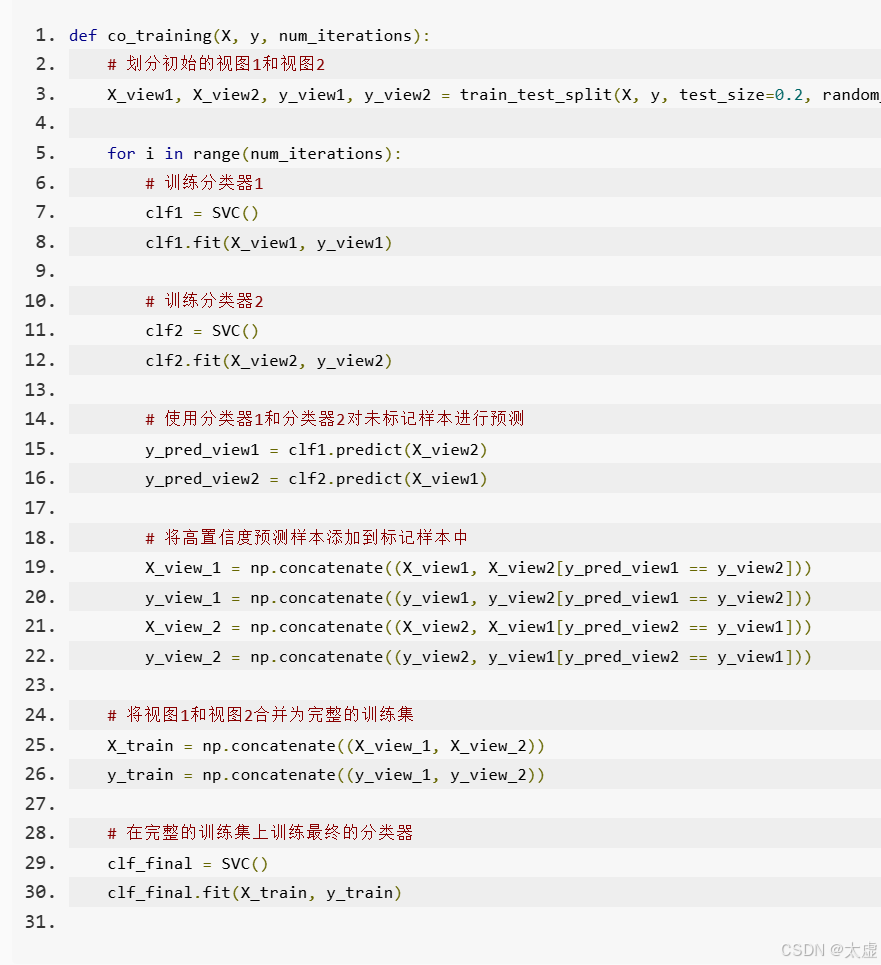
def co_training(X, y, num_iterations):
# ********** Begin **********#
# 划分初始的视图1和视图2,测试集与训练集的比例为1:1, 随机种子为1。
X_view1, X_view2, y_view1, y_view2 = train_test_split(X, y, test_size=0.5, random_state=1)
# 训练两个初始分类器
clf1 = SVC(probability=True) # 使用probability=True以获得类别的概率值
clf2 = SVC(probability=True)
clf1.fit(X_view1, y_view1)
clf2.fit(X_view2, y_view2)
for i in range(num_iterations):
# 使用分类器1和分类器2对未标记样本进行预测
y_pred_view1 = clf1.predict(X_view2)
y_pred_view2 = clf2.predict(X_view1)
# 使用分类器1的高置信度预测样本来扩充视图1
prob_view2 = clf1.predict_proba(X_view2) # 获取预测的概率
high_confidence_1 = np.max(prob_view2, axis=1) > 0.95 # 置信度阈值设定为0.95
X_view1 = np.concatenate((X_view1, X_view2[high_confidence_1]))
y_view1 = np.concatenate((y_view1, y_pred_view1[high_confidence_1]))
# 使用分类器2的高置信度预测样本来扩充视图2
prob_view1 = clf2.predict_proba(X_view1) # 获取预测的概率
high_confidence_2 = np.max(prob_view1, axis=1) > 0.95 # 置信度阈值设定为0.95
X_view2 = np.concatenate((X_view2, X_view1[high_confidence_2]))
y_view2 = np.concatenate((y_view2, y_pred_view2[high_confidence_2]))
# 重新训练分类器
clf1.fit(X_view1, y_view1)
clf2.fit(X_view2, y_view2)
# 将视图1和视图2合并为完整的训练集
X_train = np.concatenate((X_view1, X_view2))
y_train = np.concatenate((y_view1, y_view2))
# 在完整的训练集上训练最终的分类器
clf_final = SVC()
clf_final.fit(X_train, y_train)
return clf_final
# ********** End **********#
# 加载数据集
iris = load_iris()
X = iris.data
y = iris.target
# 使用协同训练算法进行分类
clf = co_training(X, y, num_iterations=5)
# 在测试集上进行预测
X_test = X[100:] # 使用后50个样本作为测试集
y_test = y[100:]
y_pred = clf.predict(X_test)
# 计算准确率
accuracy = accuracy_score(y_test, y_pred)
print("Accuracy:", accuracy)
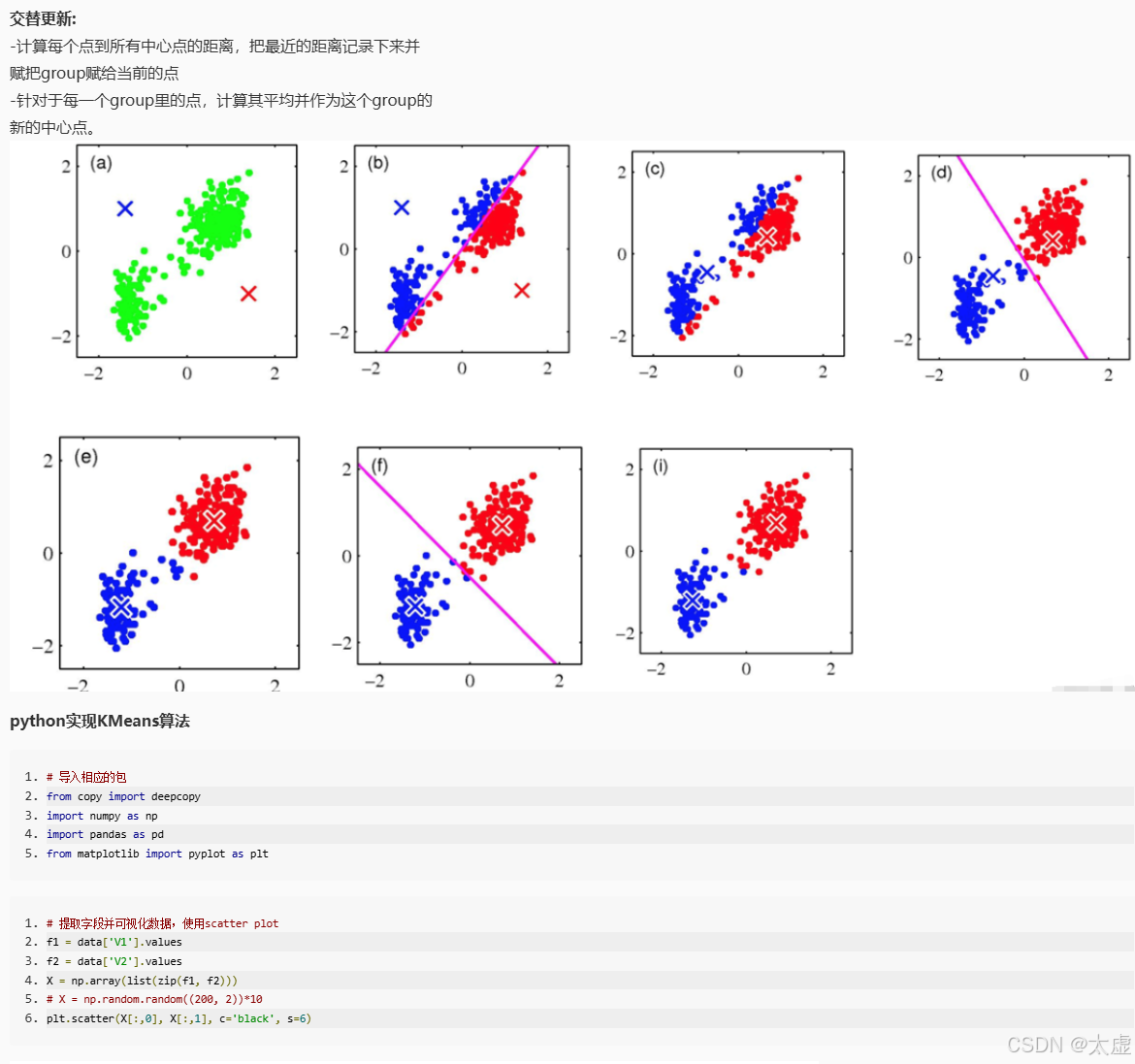
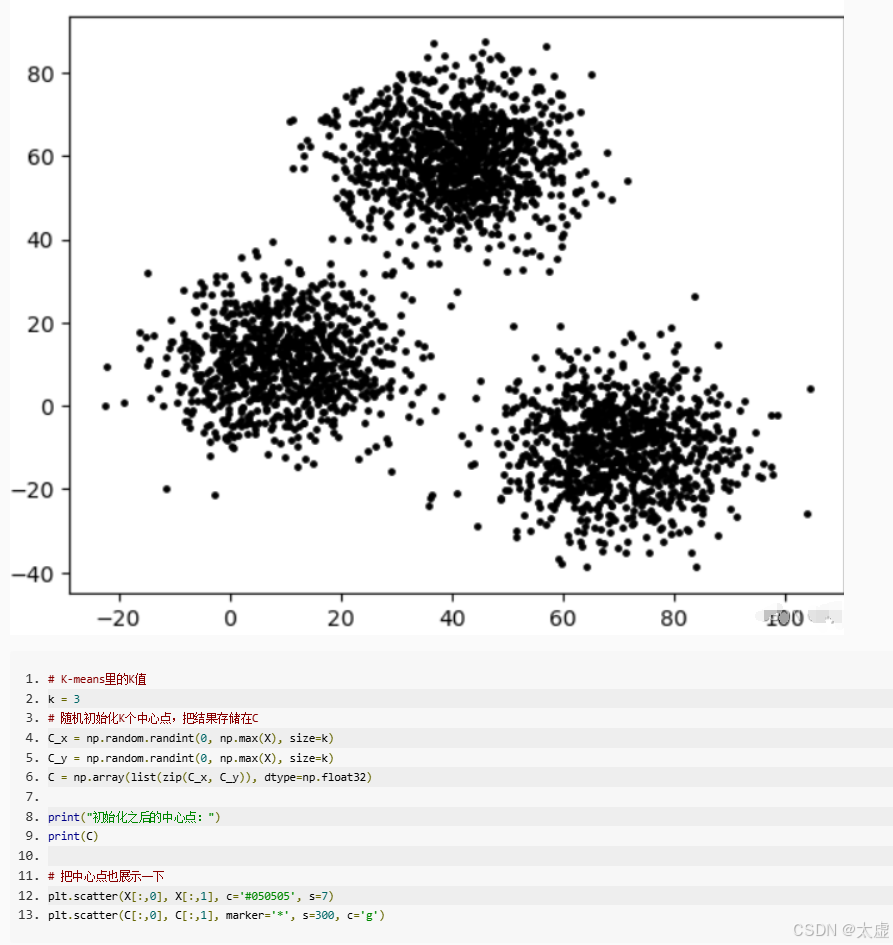
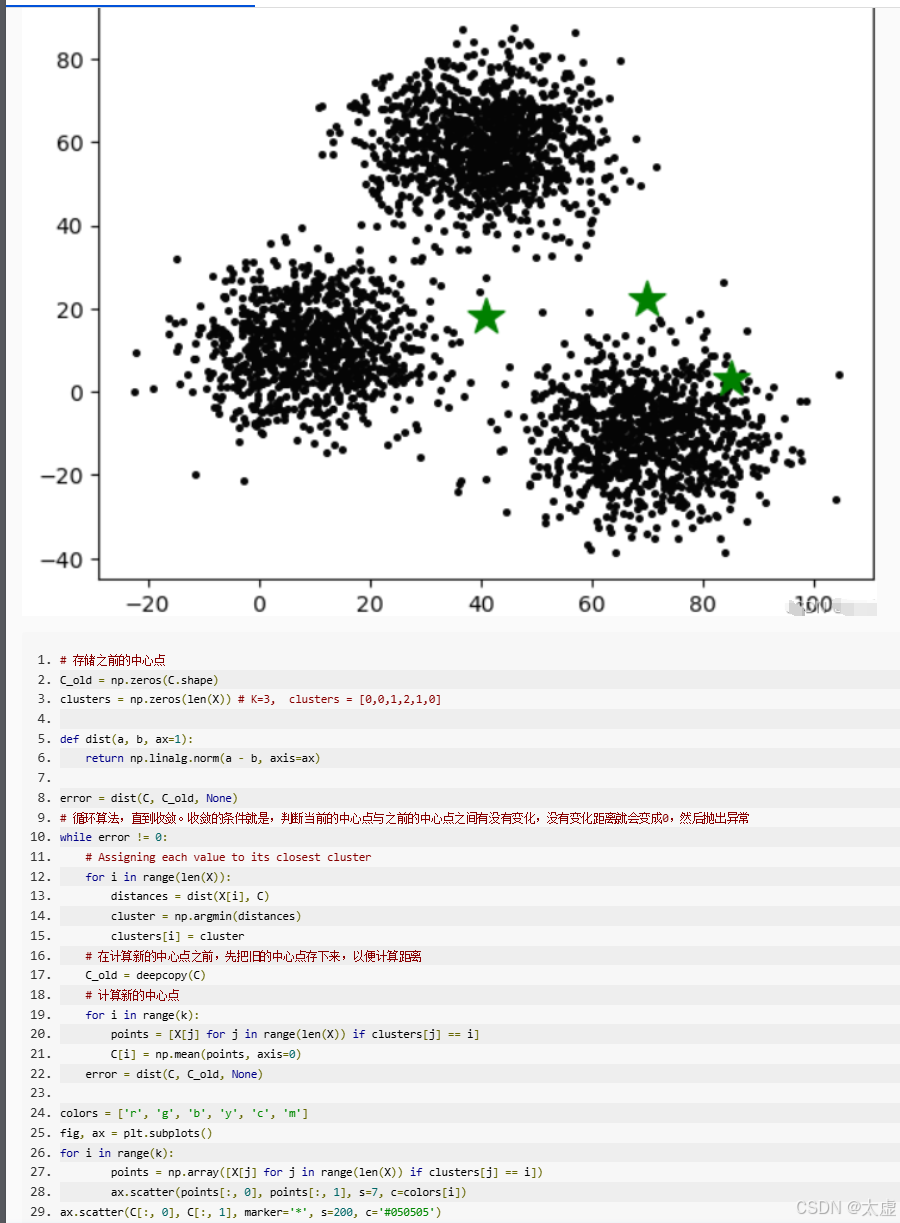
十、半监督聚类
import numpy as np
def distEclud(vecA, vecB):
'''
输入:向量A和B
输出:A和B间的欧式距离
'''
return np.sqrt(sum(np.power(vecA - vecB, 2)))
def newCent(L):
'''
输入:有标签数据集L
输出:根据L确定初始聚类中心
'''
centroids = []
label_list = np.unique(L[:, -1]) # 获取所有的类别标签
for i in label_list:
L_i = L[(L[:, -1]) == i] # 按照标签分割数据
cent_i = np.mean(L_i, 0) # 计算每个簇的均值
centroids.append(cent_i[:-1]) # 忽略最后一列标签
return np.array(centroids)
def semi_kMeans(L, U, distMeas=distEclud, initial_centriod=newCent):
'''
输入:有标签数据集L(最后一列为类别标签)、无标签数据集U(无类别标签)
输出:聚类结果
'''
# 合并有标签数据L和无标签数据U
dataSet = np.vstack((L[:, :-1], U)) # L去掉标签,U本身无标签
label_list = np.unique(L[:, -1]) # 获取L中所有类别标签
k = len(label_list) # L中类别个数
m = np.shape(dataSet)[0] # 数据集总共有多少样本
# 初始化样本分配(记录每个点的聚类标签)
clusterAssment = np.zeros(m)
centroids = initial_centriod(L) # 确定初始聚类中心
clusterChanged = True
while clusterChanged:
clusterChanged = False
# 1. 将每个样本分配到最近的聚类中心
for i in range(m):
minDist = np.inf # 初始化最小距离为无穷大
minIndex = -1
for j in range(k):
dist = distMeas(dataSet[i], centroids[j]) # 计算样本i到聚类中心j的距离
if dist < minDist:
minDist = dist
minIndex = j # 找到最近的聚类中心
if clusterAssment[i] != minIndex: # 如果该样本的标签发生了变化
clusterChanged = True
clusterAssment[i] = minIndex # 更新该样本的标签
# 2. 更新聚类中心
for j in range(k):
# 获取当前簇中所有样本
pointsInCluster = dataSet[clusterAssment == j]
if len(pointsInCluster) > 0:
newCentroid = np.mean(pointsInCluster, axis=0) # 计算该簇样本的均值
centroids[j] = newCentroid # 更新聚类中心
return clusterAssment
# 测试数据
L = np.array([[1.0, 4.2, 1],
[1.3, 4.0, 1],
[1.0, 4.0, 1],
[1.5, 4.3, 1],
[2.0, 4.0, 0],
[2.3, 3.7, 0],
[4.0, 1.0, 0]]) # L的最后一列是类别标签
U = np.array([[1.4, 5.0],
[1.3, 5.4],
[2.0, 5.0],
[4.0, 2.0],
[5.0, 1.0],
[5.0, 2.0]])
# 执行半监督K-means
clusterResult = semi_kMeans(L, U)
print(clusterResult)