传感器实验讲解1
1.应变片单臂电桥,半桥,全桥性能实验
首先是应变片,这个不再过多讲解,实验所利用的是应变片的电阻应变效应——即金属或半导体在外力作用下,产生应变,其阻值也相应改变。
由于一般产生的应变都是微小的,所以要用电桥来电路来测由其引起的电阻变化。
电桥电路如下:

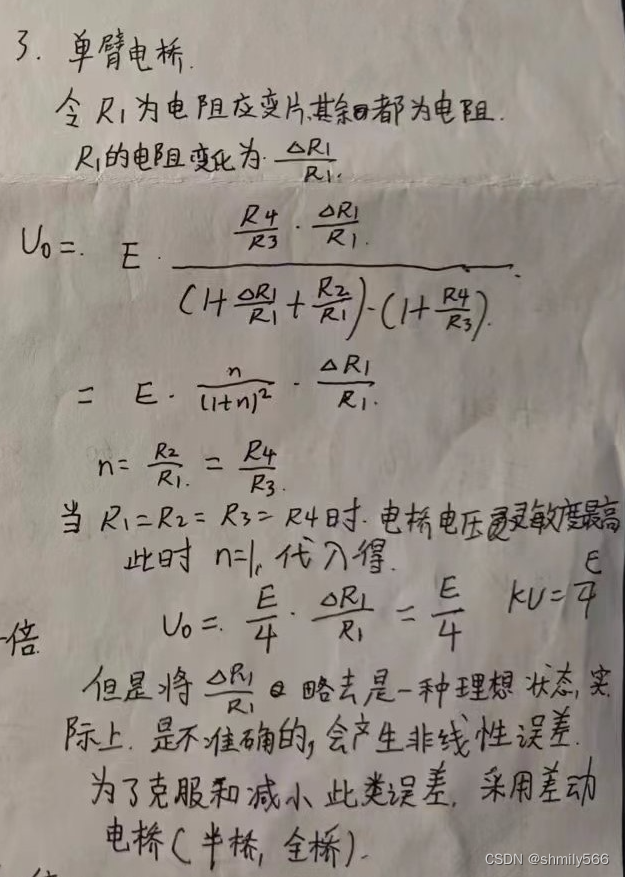
那么单臂电桥就是R1为应变片其余三个都是电阻的电路。可以得到以下的推导,可以看出U0=E/4即灵敏度Ku=E/4。

但是单臂电桥是有非线性误差的。推导如下:
半桥就是R1和R2为应变电阻。可以得到Ku=E/2
全桥就是四个电阻全为应变电阻。Ku=E。

实验步骤就是在应变器实验模块的天平上加砝码,,每一个都是20g重,直到加到200g停止,记录每次加一个砝码时电压的大小。之后根据所得数据拟合直线。



得到三个图像分别为

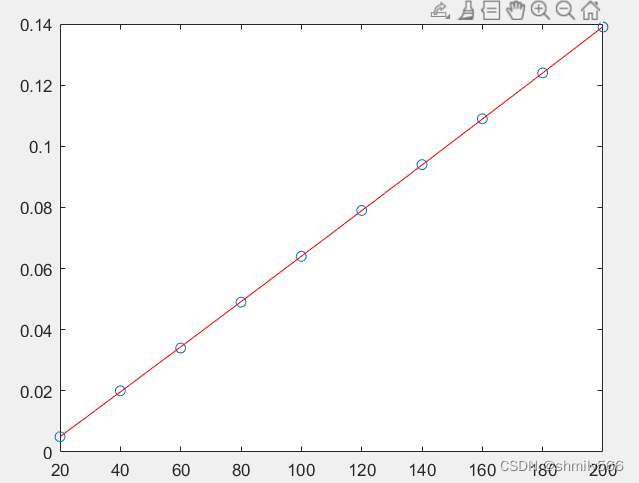

当然,我这里的图像肯定有很多不足,因为实验数据是有些问题的。
数据处理

以单臂的为例,让你求灵敏度S和非线性误差。S就是你拟合出来图像的斜率K。非线性误差这里公式写错了,应该为xFS,也就是你电压的最大值(在200g时的电压值)。后面两个处理跟这里是一样的。
2.移相器和相敏检波器的实验

这两个仪器说实话要讲清和理解要费点事,我们按照实验要求一步一步操作记录数据即可。
移相器:


需要记的是f为1kHZ时和f为9kHZ时,Rw(移项电位器)为0和10千欧时的相位。
相敏检波器:
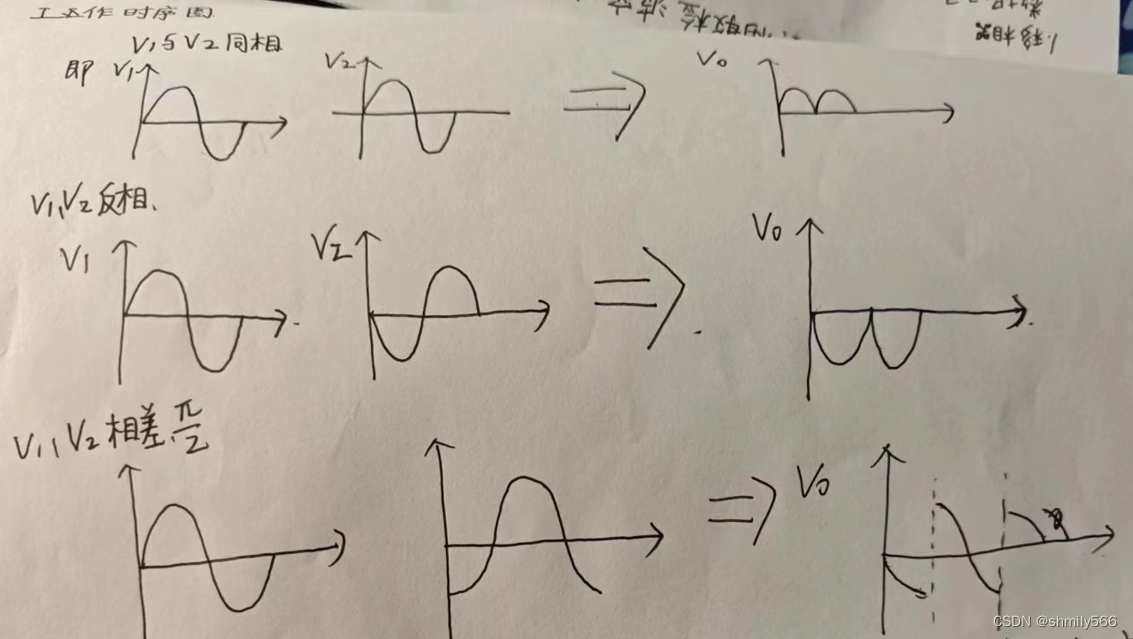
实验手册上应该有这样的时序图,我们可以理解他的目的。就是两输入不同的相位状态会使相敏检波器呈现不一样的波形,通过看相敏检波器的波形可以知道输入电压的相位关系。实验中大概会用到如上图中的几组时序。