快速上手Vim的使用
Vim
- Linux编辑器-vim使用
- ==命令行模式下所有选项都可以带数字==
- ==底行模式==
- ==可视块模式(ctrl+V进入)==
Linux编辑器-vim使用
Vim有多种模式的编辑器。能帮助我们很快的进行代码的编辑,甚至完成很多其他事情。
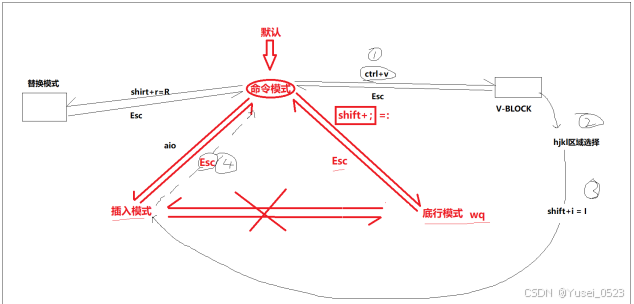
默认情况下我们打开vim在命令模式下,我们切换到其他模式都是通过命令模式去按相应的快捷键,进入到其他的如插入模式(aio),底行模式,可视化模块模式。如果我们在底行模式想进入到插入模式,我们必须要需要按Esc退到命命令模式,再从命令模式进入到插入模式。因此我们在使用的时候要记住,我们要切换模式的时候,首先要退出到命令行模式
命令行模式下所有选项都可以带数字
按「G」:移动到文章的最后
按「 $ 」:移动到光标所在行的“行尾”
按「^」:移动到光标所在行的“行首”
按「w」:光标跳到下个字的开头
按「e」:光标跳到下个字的字尾
按「b」:光标回到上个字的开头
按[gg]:进入到文本开始
按[shift+g]:进入文本末端
按「ctrl」+「b」:屏幕往“后”移动一页
按「ctrl」+「f」:屏幕往“前”移动一页
按「ctrl」+「u」:屏幕往“后”移动半页
按「ctrl」+「d」:屏幕往“前”移动半页
「x」:每按一次,删除光标所在位置的一个字符
「#x」:例如,「6x」表示删除光标所在位置的“后面(包含自己在内)”6个字符
「X」:大写的X,每按一次,删除光标所在位置的“前面”一个字符
「#X」:例如,「20X」表示删除光标所在位置的“前面”20个字符
「dd」:删除光标所在行
「#dd」:从光标所在行开始删除#行
「yw」:将光标所在之处到字尾的字符复制到缓冲区中。
「#yw」:复制#个字到缓冲区
「yy」:复制光标所在行到缓冲区。
「#yy」:例如,「6yy」表示拷贝从光标所在的该行“往下数”6行文字。
「p」:将缓冲区内的字符贴到光标所在位置。注意:所有与“y”有关的复制命令都必须与“p”配合才能完
成复制与粘贴功能。
「r」:替换光标所在处的字符。「R」:替换光标所到之处的字符,直到按下「ESC」键为止。
「u」:如果您误执行一个命令,可以马上按下「u」,回到上一个操作。按多次“u”可以执行多次回
复。
「ctrl + r」: 撤销的恢复
「cw」:更改光标所在处的字到字尾处
「c#w」:例如,「c3w」表示更改3个字
「ctrl」+「g」列出光标所在行的行号。
「#G」:例如,「15G」,表示移动光标至文章的第15行行首。
「Shift+~」:大小写替换
shiftI+#定位当前单词高亮显示,按n跳转到下一个单词处
多用Vim编辑下代码就记住这些快捷键了
底行模式
在底行模式当中我们可以进行这个文件的保存,比如说我们用这个shift+:进入底行模式。然后我们写wq就可以保存并退出,然后的话就是保存q就是单纯的退出,然后!+命令可以在vim中执行命令!./a.out
一键替换
:%s/printf/count/ 将printf全部替换成cout
:%s/printf/cout<</ 将cout前部替换成printf
打开多个文件进行分屏
:vs test.c(打开test.c并进行分屏)
跳转到不同文件中
ctrl+ww
其他一些快捷操作
vim code.c +14 打开文件光标直接定位到14行
可视块模式(ctrl+V进入)
进行批量化注释,
Vim当中上下移动光标最好使用HJKL(左上下右,尽管也可以通过键盘上的箭头移动但在可视块模式下只能通过HJKL移动)
进入命令模式(按 Esc 键)。
选择要注释的行(可以使用 V 进入可视行模式,然后使用 j 或 k 键选择多行)。
在命令模式下输入 I#(I 进入插入模式并在每行行首插入文本,# 是注释符号),然后按 Esc 键退出插入模式。