android framework-init进程
一、init进程简介
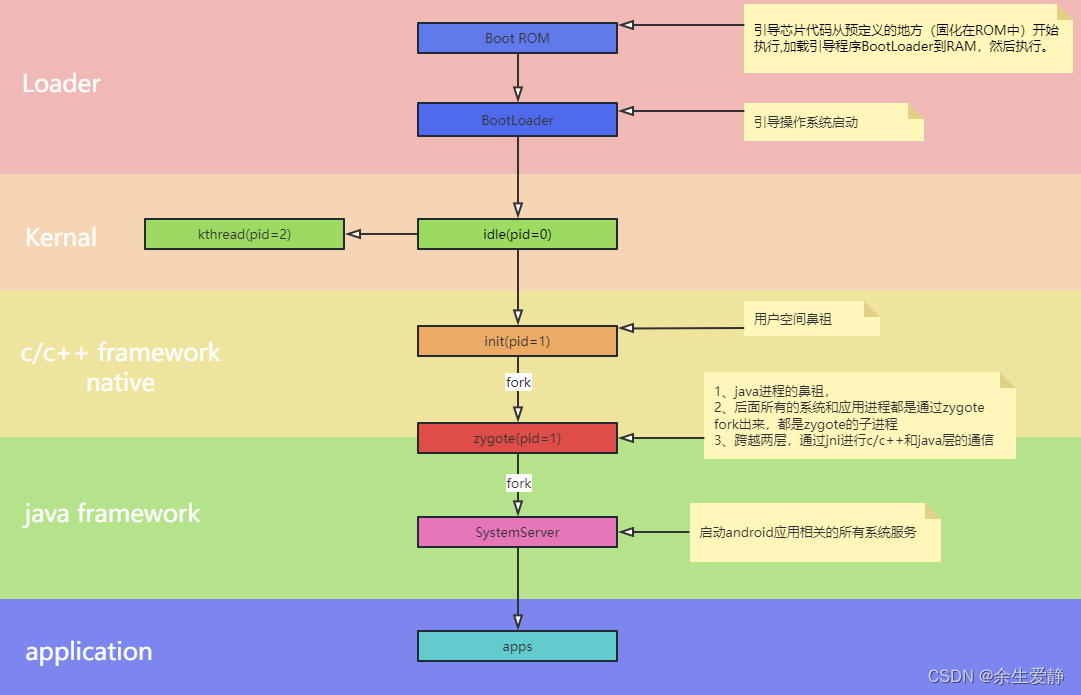
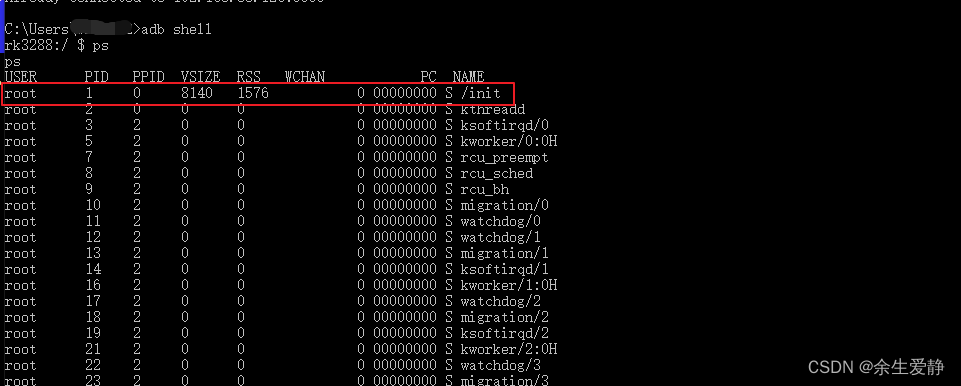
init进程是用户空间的第一个进程,它的进程pid为1
二、init进程详解
涉及的源码路径:
- android-10.0.0_r41\system\core\init\main.cpp
- android-10.0.0_r41\system\core\init\first_stage_init.cpp
- android-10.0.0_r41\system\core\init\selinux.cpp
- android-10.0.0_r41\system\core\init\init.cpp
- android-10.0.0_r41\system\core\rootdir\init.rc
2.1、android.bp
路径:android-10.0.0_r41\system\core\init\Android.bp
对应的源码:
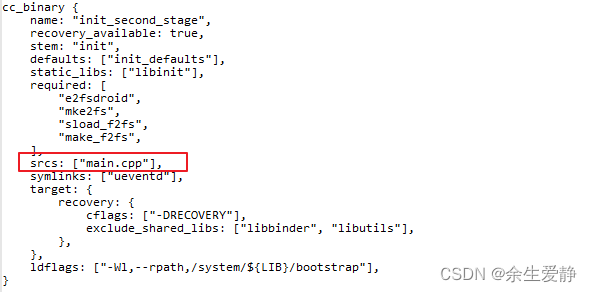
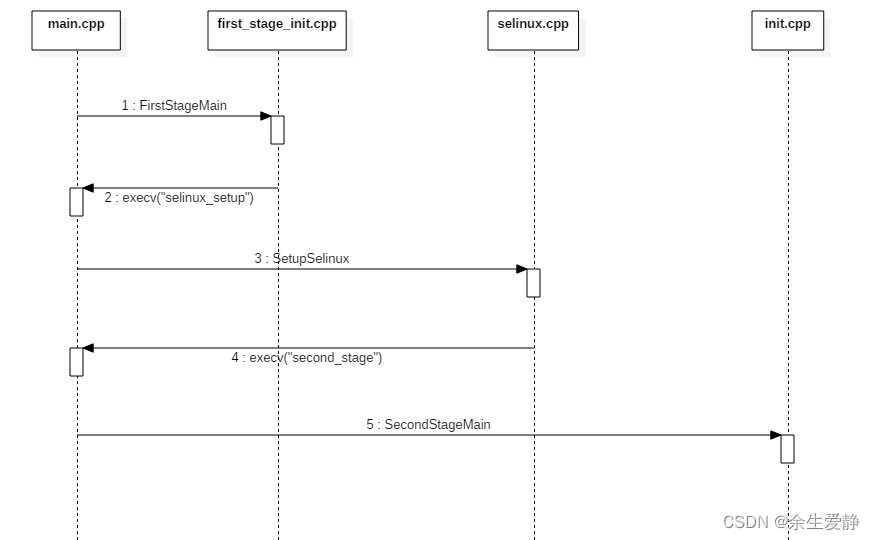
2.2、main.cpp
android-10.0.0_r41\system\core\init\main.cpp
init进程的入口函数:
int main(int argc, char** argv) {
#if __has_feature(address_sanitizer)
__asan_set_error_report_callback(AsanReportCallback);
#endif
if (!strcmp(basename(argv[0]), "ueventd")) {
return ueventd_main(argc, argv);
}
if (argc > 1) {
if (!strcmp(argv[1], "subcontext")) {
android::base::InitLogging(argv, &android::base::KernelLogger);
const BuiltinFunctionMap function_map;
return SubcontextMain(argc, argv, &function_map);
}
if (!strcmp(argv[1], "selinux_setup")) {
return SetupSelinux(argv);
}
if (!strcmp(argv[1], "second_stage")) {
return SecondStageMain(argc, argv);
}
}
return FirstStageMain(argc, argv);
}
- 该main函数会被多次调用
2.3、first_stage_init.cpp
路径:android-10.0.0_r41\system\core\init\first_stage_init.cpp
源码
int FirstStageMain(int argc, char** argv) {
if (REBOOT_BOOTLOADER_ON_PANIC) {
InstallRebootSignalHandlers();
}
boot_clock::time_point start_time = boot_clock::now();
std::vector<std::pair<std::string, int>> errors;
#define CHECKCALL(x) \
if (x != 0) errors.emplace_back(#x " failed", errno);
// Clear the umask.
umask(0);
CHECKCALL(clearenv());
CHECKCALL(setenv("PATH", _PATH_DEFPATH, 1));
// Get the basic filesystem setup we need put together in the initramdisk
// on / and then we'll let the rc file figure out the rest.
CHECKCALL(mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755"));
CHECKCALL(mkdir("/dev/pts", 0755));
CHECKCALL(mkdir("/dev/socket", 0755));
CHECKCALL(mount("devpts", "/dev/pts", "devpts", 0, NULL));
#define MAKE_STR(x) __STRING(x)
CHECKCALL(mount("proc", "/proc", "proc", 0, "hidepid=2,gid=" MAKE_STR(AID_READPROC)));
#undef MAKE_STR
// Don't expose the raw commandline to unprivileged processes.
CHECKCALL(chmod("/proc/cmdline", 0440));
gid_t groups[] = {AID_READPROC};
CHECKCALL(setgroups(arraysize(groups), groups));
CHECKCALL(mount("sysfs", "/sys", "sysfs", 0, NULL));
CHECKCALL(mount("selinuxfs", "/sys/fs/selinux", "selinuxfs", 0, NULL));
CHECKCALL(mknod("/dev/kmsg", S_IFCHR | 0600, makedev(1, 11)));
if constexpr (WORLD_WRITABLE_KMSG) {
CHECKCALL(mknod("/dev/kmsg_debug", S_IFCHR | 0622, makedev(1, 11)));
}
CHECKCALL(mknod("/dev/random", S_IFCHR | 0666, makedev(1, 8)));
CHECKCALL(mknod("/dev/urandom", S_IFCHR | 0666, makedev(1, 9)));
// This is needed for log wrapper, which gets called before ueventd runs.
CHECKCALL(mknod("/dev/ptmx", S_IFCHR | 0666, makedev(5, 2)));
CHECKCALL(mknod("/dev/null", S_IFCHR | 0666, makedev(1, 3)));
// These below mounts are done in first stage init so that first stage mount can mount
// subdirectories of /mnt/{vendor,product}/. Other mounts, not required by first stage mount,
// should be done in rc files.
// Mount staging areas for devices managed by vold
// See storage config details at http://source.android.com/devices/storage/
CHECKCALL(mount("tmpfs", "/mnt", "tmpfs", MS_NOEXEC | MS_NOSUID | MS_NODEV,
"mode=0755,uid=0,gid=1000"));
// /mnt/vendor is used to mount vendor-specific partitions that can not be
// part of the vendor partition, e.g. because they are mounted read-write.
CHECKCALL(mkdir("/mnt/vendor", 0755));
// /mnt/product is used to mount product-specific partitions that can not be
// part of the product partition, e.g. because they are mounted read-write.
CHECKCALL(mkdir("/mnt/product", 0755));
// /apex is used to mount APEXes
CHECKCALL(mount("tmpfs", "/apex", "tmpfs", MS_NOEXEC | MS_NOSUID | MS_NODEV,
"mode=0755,uid=0,gid=0"));
// /debug_ramdisk is used to preserve additional files from the debug ramdisk
CHECKCALL(mount("tmpfs", "/debug_ramdisk", "tmpfs", MS_NOEXEC | MS_NOSUID | MS_NODEV,
"mode=0755,uid=0,gid=0"));
#undef CHECKCALL
//重定向标准输入输出流到/dev/null
SetStdioToDevNull(argv);
// Now that tmpfs is mounted on /dev and we have /dev/kmsg, we can actually
// talk to the outside world...
//初始化内核日志系统
InitKernelLogging(argv);
if (!errors.empty()) {
for (const auto& [error_string, error_errno] : errors) {
LOG(ERROR) << error_string << " " << strerror(error_errno);
}
LOG(FATAL) << "Init encountered errors starting first stage, aborting";
}
LOG(INFO) << "init first stage started!";
auto old_root_dir = std::unique_ptr<DIR, decltype(&closedir)>{opendir("/"), closedir};
if (!old_root_dir) {
PLOG(ERROR) << "Could not opendir(\"/\"), not freeing ramdisk";
}
struct stat old_root_info;
if (stat("/", &old_root_info) != 0) {
PLOG(ERROR) << "Could not stat(\"/\"), not freeing ramdisk";
old_root_dir.reset();
}
if (ForceNormalBoot()) {
mkdir("/first_stage_ramdisk", 0755);
// SwitchRoot() must be called with a mount point as the target, so we bind mount the
// target directory to itself here.
if (mount("/first_stage_ramdisk", "/first_stage_ramdisk", nullptr, MS_BIND, nullptr) != 0) {
LOG(FATAL) << "Could not bind mount /first_stage_ramdisk to itself";
}
SwitchRoot("/first_stage_ramdisk");
}
// If this file is present, the second-stage init will use a userdebug sepolicy
// and load adb_debug.prop to allow adb root, if the device is unlocked.
if (access("/force_debuggable", F_OK) == 0) {
std::error_code ec; // to invoke the overloaded copy_file() that won't throw.
if (!fs::copy_file("/adb_debug.prop", kDebugRamdiskProp, ec) ||
!fs::copy_file("/userdebug_plat_sepolicy.cil", kDebugRamdiskSEPolicy, ec)) {
LOG(ERROR) << "Failed to setup debug ramdisk";
} else {
// setenv for second-stage init to read above kDebugRamdisk* files.
setenv("INIT_FORCE_DEBUGGABLE", "true", 1);
}
}
if (!DoFirstStageMount()) {
LOG(FATAL) << "Failed to mount required partitions early ...";
}
struct stat new_root_info;
if (stat("/", &new_root_info) != 0) {
PLOG(ERROR) << "Could not stat(\"/\"), not freeing ramdisk";
old_root_dir.reset();
}
if (old_root_dir && old_root_info.st_dev != new_root_info.st_dev) {
FreeRamdisk(old_root_dir.get(), old_root_info.st_dev);
}
SetInitAvbVersionInRecovery();
static constexpr uint32_t kNanosecondsPerMillisecond = 1e6;
uint64_t start_ms = start_time.time_since_epoch().count() / kNanosecondsPerMillisecond;
setenv("INIT_STARTED_AT", std::to_string(start_ms).c_str(), 1);
const char* path = "/system/bin/init";
const char* args[] = {path, "selinux_setup", nullptr};
execv(path, const_cast<char**>(args));
// execv() only returns if an error happened, in which case we
// panic and never fall through this conditional.
PLOG(FATAL) << "execv(\"" << path << "\") failed";
return 1;
}
- 设置PATH环境变量
- 往ramfs创建节点,并挂在各种系统。
- 像/dev/random,/proc等都是linux系统标准的目录项,/mnt/vendor,/mnt/product则是android系统特有的
- 重定向输出流到/dev/kmsg下,重新启动init,并设置参数selinux_setup,再次进入main函数时判断下一阶段
2.4、selinux.cpp
Android系统启动时,init进程负责将安全策略(Security Policy)加载到内核LSM模块中,内核LSM模块HOOK了文件系统的读写操作,当一个进程要去读写一个系统资源时会被HOOK,LSM内核模块会去AVC(Access Vector Cache)缓存向量中查询操作是否合法,如果查到则允许操作,否则就取安全服务(Security Server)中去检查,同时将检查的结果缓存到AVC缓存向量中,若安全服务中也没有查找到就拒绝这个操作。
路径:android-10.0.0_r41\system\core\init\selinux.cpp
源码:
int SetupSelinux(char** argv) {
InitKernelLogging(argv);
if (REBOOT_BOOTLOADER_ON_PANIC) {
InstallRebootSignalHandlers();
}
// Set up SELinux, loading the SELinux policy.
//设置SELinux,加载SELinux安全策略
SelinuxSetupKernelLogging();
SelinuxInitialize();
// We're in the kernel domain and want to transition to the init domain. File systems that
// store SELabels in their xattrs, such as ext4 do not need an explicit restorecon here,
// but other file systems do. In particular, this is needed for ramdisks such as the
// recovery image for A/B devices.
if (selinux_android_restorecon("/system/bin/init", 0) == -1) {
PLOG(FATAL) << "restorecon failed of /system/bin/init failed";
}
const char* path = "/system/bin/init";
const char* args[] = {path, "second_stage", nullptr};
execv(path, const_cast<char**>(args));
// execv() only returns if an error happened, in which case we
// panic and never return from this function.
PLOG(FATAL) << "execv(\"" << path << "\") failed";
return 1;
}
- 设置SELinux,加载SELinux安全策略
- 重新启动init,并设置参数second_stage,再次进入main函数时判断进入下一阶段
2.5、init.cpp
路径:android-10.0.0_r41\system\core\init\init.cpp
源码:
int SecondStageMain(int argc, char** argv) {
if (REBOOT_BOOTLOADER_ON_PANIC) {
InstallRebootSignalHandlers();
}
SetStdioToDevNull(argv);
InitKernelLogging(argv);
LOG(INFO) << "init second stage started!";
// Set init and its forked children's oom_adj.
if (auto result = WriteFile("/proc/1/oom_score_adj", "-1000"); !result) {
LOG(ERROR) << "Unable to write -1000 to /proc/1/oom_score_adj: " << result.error();
}
// Enable seccomp if global boot option was passed (otherwise it is enabled in zygote).
GlobalSeccomp();
// Set up a session keyring that all processes will have access to. It
// will hold things like FBE encryption keys. No process should override
// its session keyring.
keyctl_get_keyring_ID(KEY_SPEC_SESSION_KEYRING, 1);
// Indicate that booting is in progress to background fw loaders, etc.
close(open("/dev/.booting", O_WRONLY | O_CREAT | O_CLOEXEC, 0000));
property_init();
// If arguments are passed both on the command line and in DT,
// properties set in DT always have priority over the command-line ones.
process_kernel_dt();
process_kernel_cmdline();
// Propagate the kernel variables to internal variables
// used by init as well as the current required properties.
export_kernel_boot_props();
// Make the time that init started available for bootstat to log.
property_set("ro.boottime.init", getenv("INIT_STARTED_AT"));
property_set("ro.boottime.init.selinux", getenv("INIT_SELINUX_TOOK"));
// Set libavb version for Framework-only OTA match in Treble build.
const char* avb_version = getenv("INIT_AVB_VERSION");
if (avb_version) property_set("ro.boot.avb_version", avb_version);
// See if need to load debug props to allow adb root, when the device is unlocked.
const char* force_debuggable_env = getenv("INIT_FORCE_DEBUGGABLE");
if (force_debuggable_env && AvbHandle::IsDeviceUnlocked()) {
load_debug_prop = "true"s == force_debuggable_env;
}
// Clean up our environment.
unsetenv("INIT_STARTED_AT");
unsetenv("INIT_SELINUX_TOOK");
unsetenv("INIT_AVB_VERSION");
unsetenv("INIT_FORCE_DEBUGGABLE");
// Now set up SELinux for second stage.
SelinuxSetupKernelLogging();
SelabelInitialize();
SelinuxRestoreContext();
Epoll epoll;
if (auto result = epoll.Open(); !result) {
PLOG(FATAL) << result.error();
}
InstallSignalFdHandler(&epoll);
property_load_boot_defaults(load_debug_prop);
UmountDebugRamdisk();
fs_mgr_vendor_overlay_mount_all();
export_oem_lock_status();
StartPropertyService(&epoll);
MountHandler mount_handler(&epoll);
set_usb_controller();
const BuiltinFunctionMap function_map;
Action::set_function_map(&function_map);
if (!SetupMountNamespaces()) {
PLOG(FATAL) << "SetupMountNamespaces failed";
}
subcontexts = InitializeSubcontexts();
//am中的actions_成员变量用来保存action list(动作列表)
ActionManager& am = ActionManager::GetInstance();
//sm中的service_成员变量用来保存service list(服务列表)
ServiceList& sm = ServiceList::GetInstance();
// 解析init.rc文件
LoadBootScripts(am, sm);
// Turning this on and letting the INFO logging be discarded adds 0.2s to
// Nexus 9 boot time, so it's disabled by default.
if (false) DumpState();
// Make the GSI status available before scripts start running.
if (android::gsi::IsGsiRunning()) {
property_set("ro.gsid.image_running", "1");
} else {
property_set("ro.gsid.image_running", "0");
}
am.QueueBuiltinAction(SetupCgroupsAction, "SetupCgroups");
am.QueueEventTrigger("early-init");
// Queue an action that waits for coldboot done so we know ueventd has set up all of /dev...
am.QueueBuiltinAction(wait_for_coldboot_done_action, "wait_for_coldboot_done");
// ... so that we can start queuing up actions that require stuff from /dev.
am.QueueBuiltinAction(MixHwrngIntoLinuxRngAction, "MixHwrngIntoLinuxRng");
am.QueueBuiltinAction(SetMmapRndBitsAction, "SetMmapRndBits");
am.QueueBuiltinAction(SetKptrRestrictAction, "SetKptrRestrict");
Keychords keychords;
am.QueueBuiltinAction(
[&epoll, &keychords](const BuiltinArguments& args) -> Result<Success> {
for (const auto& svc : ServiceList::GetInstance()) {
keychords.Register(svc->keycodes());
}
keychords.Start(&epoll, HandleKeychord);
return Success();
},
"KeychordInit");
am.QueueBuiltinAction(console_init_action, "console_init");
// Trigger all the boot actions to get us started.
am.QueueEventTrigger("init");
// Starting the BoringSSL self test, for NIAP certification compliance.
am.QueueBuiltinAction(StartBoringSslSelfTest, "StartBoringSslSelfTest");
// Repeat mix_hwrng_into_linux_rng in case /dev/hw_random or /dev/random
// wasn't ready immediately after wait_for_coldboot_done
am.QueueBuiltinAction(MixHwrngIntoLinuxRngAction, "MixHwrngIntoLinuxRng");
// Initialize binder before bringing up other system services
am.QueueBuiltinAction(InitBinder, "InitBinder");
// Don't mount filesystems or start core system services in charger mode.
std::string bootmode = GetProperty("ro.bootmode", "");
if (bootmode == "charger") {
am.QueueEventTrigger("charger");
} else {
am.QueueEventTrigger("late-init");
}
// Run all property triggers based on current state of the properties.
am.QueueBuiltinAction(queue_property_triggers_action, "queue_property_triggers");
//依次执行已经触发的触发器action对象的command命令,并且监听属性服务和子进程的终止
while (true) {
// By default, sleep until something happens.
auto epoll_timeout = std::optional<std::chrono::milliseconds>{};
if (do_shutdown && !shutting_down) {
do_shutdown = false;
if (HandlePowerctlMessage(shutdown_command)) {
shutting_down = true;
}
}
if (!(waiting_for_prop || Service::is_exec_service_running())) {
am.ExecuteOneCommand();
}
if (!(waiting_for_prop || Service::is_exec_service_running())) {
if (!shutting_down) {
auto next_process_action_time = HandleProcessActions();
// If there's a process that needs restarting, wake up in time for that.
if (next_process_action_time) {
epoll_timeout = std::chrono::ceil<std::chrono::milliseconds>(
*next_process_action_time - boot_clock::now());
if (*epoll_timeout < 0ms) epoll_timeout = 0ms;
}
}
// If there's more work to do, wake up again immediately.
if (am.HasMoreCommands()) epoll_timeout = 0ms;
}
if (auto result = epoll.Wait(epoll_timeout); !result) {
LOG(ERROR) << result.error();
}
}
return 0;
}
- LoadBootScripts 解析init.rc文件
//am中的actions_成员变量用来保存action list(动作列表)
ActionManager& am = ActionManager::GetInstance();
//sm中的service_成员变量用来保存service list(服务列表)
ServiceList& sm = ServiceList::GetInstance();
//解析rc文件,并将动作和服务分别添加到am和sm中
LoadBootScripts(am, sm);
static void LoadBootScripts(ActionManager& action_manager, ServiceList& service_list) {
//创建解析器
Parser parser = CreateParser(action_manager, service_list);
......
//解析init.rc文件
parser.ParseConfig("/init.rc");
......
}
Parser CreateParser(ActionManager& action_manager, ServiceList& service_list) {
Parser parser;
//添加ServiceParser触发器
parser.AddSectionParser("service", std::make_unique<ServiceParser>(&service_list, subcontexts));
//添加ActionParser触发器
parser.AddSectionParser("on", std::make_unique<ActionParser>(&action_manager, subcontexts));
//添加ImportParser触发器
parser.AddSectionParser("import", std::make_unique<ImportParser>(&parser));
return parser;
}
void Parser::AddSectionParser(const std::string& name, std::unique_ptr<SectionParser> parser) {
//以键值对的形式添加到section_parsers_中
section_parsers_[name] = std::move(parser);
}
2.5.1、init.rc文件
init.rc 位于 “/system/core/rootdir” 目录下, 在这个路径下还包括四个关于 zygote 的 rc 文件。分别是 init.zygote32.rc,init.zygote32_64.rc,init.zygote64.rc,init.zygote64_32.rc,由硬件决定调用哪个文件。
-
init.rc 语句类型
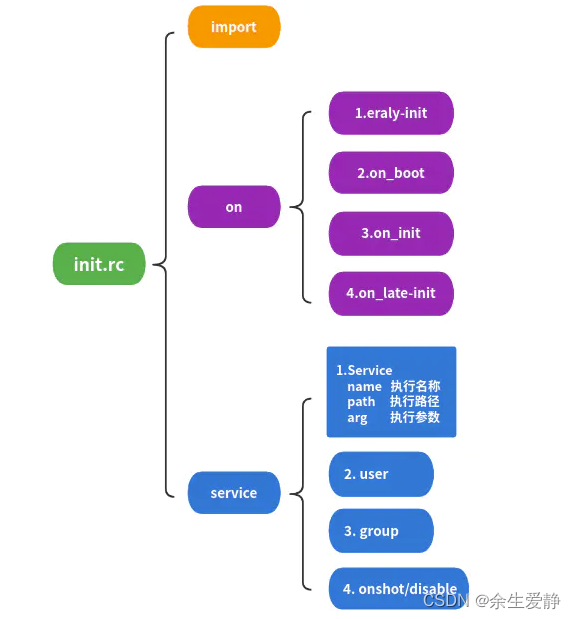
init.rc 是一个配置文件,是由Android初始化语言编写的脚本,主要包含五种类型语句:Action、Command、Service、Option、Import ,接下来就上述语句做分别做叙述。 -
Action
动作由一组 命令(Commands)组成,动作还包含了一个 触发器 ,决定了运行这个动作的时机。
Action:通过触发器 trigger ,即通过以 on 开头的语句来决定执行相应的 service 的时机,具体有如下时机:
on early-init; 在初始化早期阶段触发;
on init; 在初始化阶段触发;
on late-init; 在初始化晚期阶段触发;
on boot/charger: 当系统启动/充电时触发;
on property:=: 当属性值满足条件时触发;
- Command
Command 是 action 的命令列表中命令,或者是 service 中的选项 onrestart 的参数命令,命令将在所属事件发生时被一个一个的执行。常用命令如下:
class_start <service_class_name>: 启动属于同一个class的所有服务;
class_stop <service_class_name> : 停止指定类的服务
start <service_name>: 启动指定的服务,若已启动则跳过;
stop <service_name>: 停止正在运行的服务
setprop :设置属性值
mkdir:创建指定目录
symlink <sym_link>: 创建连接到的<sym_link>符号链接;
write: 向文件path中写入字符串;
exec: fork并执行,会阻塞init进程直到程序完毕;
exprot :设定环境变量;
loglevel :设置log级别
hostname : 设置主机名
import :导入一个额外的init配置文件
- Service
服务 Service ,以 service 开头,由 init 进程启动,一般运行在 init 的一个子进程中,所以启动 service 前需要判断对应的可执行文件是否存在。
命令: service <name> <pathname> [ <argument> ] <option> <option>
name:表示 service 的名称
pathname:表示此 service 所在的路径( service 为可执行文件,所以存在存储路径)
argument:表示启动 service 所带的参数
option:表示对此 service 的约束选项
init 生成的子进程,定义在rc文件,其中每一个service在启动时会通过fork方式生成子进程。
- Option
Options是Service的可选项,与service配合使用
disabled: 不随class自动启动,只有根据service名才启动;
oneshot: service退出后不再重启;
user/group: 设置执行服务的用户/用户组,默认都是root;
class:设置所属的类名,当所属类启动/退出时,服务也启动/停止,默认为default;
onrestart:当服务重启时执行相应命令;
socket: 创建名为/decd
critical: 在规定时间内该service不断重启,则系统会重启并进入恢复模式
default: 意味着 disabled=false,oneshot=false,critical=false
- Import
用来导入其他的 rc 文件
命令: import
2.5.2、init.rc源码
路径:android-10.0.0_r41\system\core\rootdir\init.rc
源码:
# Copyright (C) 2012 The Android Open Source Project
#
# IMPORTANT: Do not create world writable files or directories.
# This is a common source of Android security bugs.
#
import /init.environ.rc
import /init.usb.rc
import /init.${ro.hardware}.rc
import /vendor/etc/init/hw/init.${ro.hardware}.rc
import /init.usb.configfs.rc
import /init.${ro.zygote}.rc
# Cgroups are mounted right before early-init using list from /etc/cgroups.json
on early-init
# Disable sysrq from keyboard
write /proc/sys/kernel/sysrq 0
# Set the security context of /adb_keys if present.
restorecon /adb_keys
# Set the security context of /postinstall if present.
restorecon /postinstall
mkdir /acct/uid
# memory.pressure_level used by lmkd
chown root system /dev/memcg/memory.pressure_level
chmod 0040 /dev/memcg/memory.pressure_level
# app mem cgroups, used by activity manager, lmkd and zygote
mkdir /dev/memcg/apps/ 0755 system system
# cgroup for system_server and surfaceflinger
mkdir /dev/memcg/system 0550 system system
start ueventd
# Run apexd-bootstrap so that APEXes that provide critical libraries
# become available. Note that this is executed as exec_start to ensure that
# the libraries are available to the processes started after this statement.
exec_start apexd-bootstrap
on init
sysclktz 0
# Mix device-specific information into the entropy pool
copy /proc/cmdline /dev/urandom
copy /system/etc/prop.default /dev/urandom
symlink /proc/self/fd/0 /dev/stdin
symlink /proc/self/fd/1 /dev/stdout
symlink /proc/self/fd/2 /dev/stderr
symlink /system/bin /bin
symlink /system/etc /etc
# Backward compatibility.
symlink /sys/kernel/debug /d
# Link /vendor to /system/vendor for devices without a vendor partition.
symlink /system/vendor /vendor
# Create energy-aware scheduler tuning nodes
mkdir /dev/stune/foreground
mkdir /dev/stune/background
mkdir /dev/stune/top-app
mkdir /dev/stune/rt
chown system system /dev/stune
chown system system /dev/stune/foreground
chown system system /dev/stune/background
chown system system /dev/stune/top-app
chown system system /dev/stune/rt
chown system system /dev/stune/tasks
chown system system /dev/stune/foreground/tasks
chown system system /dev/stune/background/tasks
chown system system /dev/stune/top-app/tasks
chown system system /dev/stune/rt/tasks
chmod 0664 /dev/stune/tasks
chmod 0664 /dev/stune/foreground/tasks
chmod 0664 /dev/stune/background/tasks
chmod 0664 /dev/stune/top-app/tasks
chmod 0664 /dev/stune/rt/tasks
# Create blkio group and apply initial settings.
# This feature needs kernel to support it, and the
# device's init.rc must actually set the correct values.
mkdir /dev/blkio/background
chown system system /dev/blkio
chown system system /dev/blkio/background
chown system system /dev/blkio/tasks
chown system system /dev/blkio/background/tasks
chmod 0664 /dev/blkio/tasks
chmod 0664 /dev/blkio/background/tasks
write /dev/blkio/blkio.weight 1000
write /dev/blkio/background/blkio.weight 500
write /dev/blkio/blkio.group_idle 0
write /dev/blkio/background/blkio.group_idle 0
restorecon_recursive /mnt
mount configfs none /config nodev noexec nosuid
chmod 0770 /config/sdcardfs
chown system package_info /config/sdcardfs
mkdir /mnt/secure 0700 root root
mkdir /mnt/secure/asec 0700 root root
mkdir /mnt/asec 0755 root system
mkdir /mnt/obb 0755 root system
mkdir /mnt/media_rw 0750 root media_rw
mkdir /mnt/user 0755 root root
mkdir /mnt/user/0 0755 root root
mkdir /mnt/expand 0771 system system
mkdir /mnt/appfuse 0711 root root
# Storage views to support runtime permissions
mkdir /mnt/runtime 0700 root root
mkdir /mnt/runtime/default 0755 root root
mkdir /mnt/runtime/default/self 0755 root root
mkdir /mnt/runtime/read 0755 root root
mkdir /mnt/runtime/read/self 0755 root root
mkdir /mnt/runtime/write 0755 root root
mkdir /mnt/runtime/write/self 0755 root root
mkdir /mnt/runtime/full 0755 root root
mkdir /mnt/runtime/full/self 0755 root root
# Symlink to keep legacy apps working in multi-user world
symlink /storage/self/primary /sdcard
symlink /storage/self/primary /mnt/sdcard
symlink /mnt/user/0/primary /mnt/runtime/default/self/primary
write /proc/sys/kernel/panic_on_oops 1
write /proc/sys/kernel/hung_task_timeout_secs 0
write /proc/cpu/alignment 4
# scheduler tunables
# Disable auto-scaling of scheduler tunables with hotplug. The tunables
# will vary across devices in unpredictable ways if allowed to scale with
# cpu cores.
write /proc/sys/kernel/sched_tunable_scaling 0
write /proc/sys/kernel/sched_latency_ns 10000000
write /proc/sys/kernel/sched_wakeup_granularity_ns 2000000
write /proc/sys/kernel/sched_child_runs_first 0
write /proc/sys/kernel/randomize_va_space 2
write /proc/sys/vm/mmap_min_addr 32768
write /proc/sys/net/ipv4/ping_group_range "0 2147483647"
write /proc/sys/net/unix/max_dgram_qlen 600
write /proc/sys/kernel/sched_rt_runtime_us 950000
write /proc/sys/kernel/sched_rt_period_us 1000000
# Assign reasonable ceiling values for socket rcv/snd buffers.
# These should almost always be overridden by the target per the
# the corresponding technology maximums.
write /proc/sys/net/core/rmem_max 262144
write /proc/sys/net/core/wmem_max 262144
# reflect fwmark from incoming packets onto generated replies
write /proc/sys/net/ipv4/fwmark_reflect 1
write /proc/sys/net/ipv6/fwmark_reflect 1
# set fwmark on accepted sockets
write /proc/sys/net/ipv4/tcp_fwmark_accept 1
# disable icmp redirects
write /proc/sys/net/ipv4/conf/all/accept_redirects 0
write /proc/sys/net/ipv6/conf/all/accept_redirects 0
# /proc/net/fib_trie leaks interface IP addresses
chmod 0400 /proc/net/fib_trie
# Create cgroup mount points for process groups
chown system system /dev/cpuctl
chown system system /dev/cpuctl/tasks
chmod 0666 /dev/cpuctl/tasks
write /dev/cpuctl/cpu.rt_period_us 1000000
write /dev/cpuctl/cpu.rt_runtime_us 950000
# sets up initial cpusets for ActivityManager
# this ensures that the cpusets are present and usable, but the device's
# init.rc must actually set the correct cpus
mkdir /dev/cpuset/foreground
copy /dev/cpuset/cpus /dev/cpuset/foreground/cpus
copy /dev/cpuset/mems /dev/cpuset/foreground/mems
mkdir /dev/cpuset/background
copy /dev/cpuset/cpus /dev/cpuset/background/cpus
copy /dev/cpuset/mems /dev/cpuset/background/mems
# system-background is for system tasks that should only run on
# little cores, not on bigs
# to be used only by init, so don't change system-bg permissions
mkdir /dev/cpuset/system-background
copy /dev/cpuset/cpus /dev/cpuset/system-background/cpus
copy /dev/cpuset/mems /dev/cpuset/system-background/mems
# restricted is for system tasks that are being throttled
# due to screen off.
mkdir /dev/cpuset/restricted
copy /dev/cpuset/cpus /dev/cpuset/restricted/cpus
copy /dev/cpuset/mems /dev/cpuset/restricted/mems
mkdir /dev/cpuset/top-app
copy /dev/cpuset/cpus /dev/cpuset/top-app/cpus
copy /dev/cpuset/mems /dev/cpuset/top-app/mems
# change permissions for all cpusets we'll touch at runtime
chown system system /dev/cpuset
chown system system /dev/cpuset/foreground
chown system system /dev/cpuset/background
chown system system /dev/cpuset/system-background
chown system system /dev/cpuset/top-app
chown system system /dev/cpuset/restricted
chown system system /dev/cpuset/tasks
chown system system /dev/cpuset/foreground/tasks
chown system system /dev/cpuset/background/tasks
chown system system /dev/cpuset/system-background/tasks
chown system system /dev/cpuset/top-app/tasks
chown system system /dev/cpuset/restricted/tasks
# set system-background to 0775 so SurfaceFlinger can touch it
chmod 0775 /dev/cpuset/system-background
chmod 0664 /dev/cpuset/foreground/tasks
chmod 0664 /dev/cpuset/background/tasks
chmod 0664 /dev/cpuset/system-background/tasks
chmod 0664 /dev/cpuset/top-app/tasks
chmod 0664 /dev/cpuset/restricted/tasks
chmod 0664 /dev/cpuset/tasks
# make the PSI monitor accessible to others
chown system system /proc/pressure/memory
chmod 0664 /proc/pressure/memory
# qtaguid will limit access to specific data based on group memberships.
# net_bw_acct grants impersonation of socket owners.
# net_bw_stats grants access to other apps' detailed tagged-socket stats.
chown root net_bw_acct /proc/net/xt_qtaguid/ctrl
chown root net_bw_stats /proc/net/xt_qtaguid/stats
# Allow everybody to read the xt_qtaguid resource tracking misc dev.
# This is needed by any process that uses socket tagging.
chmod 0644 /dev/xt_qtaguid
chown root root /dev/cg2_bpf
chmod 0600 /dev/cg2_bpf
mount bpf bpf /sys/fs/bpf nodev noexec nosuid
# Create location for fs_mgr to store abbreviated output from filesystem
# checker programs.
mkdir /dev/fscklogs 0770 root system
# pstore/ramoops previous console log
mount pstore pstore /sys/fs/pstore nodev noexec nosuid
chown system log /sys/fs/pstore
chmod 0550 /sys/fs/pstore
chown system log /sys/fs/pstore/console-ramoops
chmod 0440 /sys/fs/pstore/console-ramoops
chown system log /sys/fs/pstore/console-ramoops-0
chmod 0440 /sys/fs/pstore/console-ramoops-0
chown system log /sys/fs/pstore/pmsg-ramoops-0
chmod 0440 /sys/fs/pstore/pmsg-ramoops-0
# enable armv8_deprecated instruction hooks
write /proc/sys/abi/swp 1
# Linux's execveat() syscall may construct paths containing /dev/fd
# expecting it to point to /proc/self/fd
symlink /proc/self/fd /dev/fd
export DOWNLOAD_CACHE /data/cache
# set RLIMIT_NICE to allow priorities from 19 to -20
setrlimit nice 40 40
# Allow up to 32K FDs per process
setrlimit nofile 32768 32768
# This allows the ledtrig-transient properties to be created here so
# that they can be chown'd to system:system later on boot
write /sys/class/leds/vibrator/trigger "transient"
# This is used by Bionic to select optimized routines.
write /dev/cpu_variant:${ro.bionic.arch} ${ro.bionic.cpu_variant}
chmod 0444 /dev/cpu_variant:${ro.bionic.arch}
write /dev/cpu_variant:${ro.bionic.2nd_arch} ${ro.bionic.2nd_cpu_variant}
chmod 0444 /dev/cpu_variant:${ro.bionic.2nd_arch}
# Allow system processes to read / write power state.
chown system system /sys/power/state
chown system system /sys/power/wakeup_count
chmod 0660 /sys/power/state
# Start logd before any other services run to ensure we capture all of their logs.
start logd
# Start essential services.
start servicemanager
start hwservicemanager
start vndservicemanager
# Healthd can trigger a full boot from charger mode by signaling this
# property when the power button is held.
on property:sys.boot_from_charger_mode=1
class_stop charger
trigger late-init
on load_persist_props_action
load_persist_props
start logd
start logd-reinit
# Indicate to fw loaders that the relevant mounts are up.
on firmware_mounts_complete
rm /dev/.booting
# Mount filesystems and start core system services.
on late-init
trigger early-fs
# Mount fstab in init.{$device}.rc by mount_all command. Optional parameter
# '--early' can be specified to skip entries with 'latemount'.
# /system and /vendor must be mounted by the end of the fs stage,
# while /data is optional.
trigger fs
trigger post-fs
# Mount fstab in init.{$device}.rc by mount_all with '--late' parameter
# to only mount entries with 'latemount'. This is needed if '--early' is
# specified in the previous mount_all command on the fs stage.
# With /system mounted and properties form /system + /factory available,
# some services can be started.
trigger late-fs
# Now we can mount /data. File encryption requires keymaster to decrypt
# /data, which in turn can only be loaded when system properties are present.
trigger post-fs-data
# Load persist properties and override properties (if enabled) from /data.
trigger load_persist_props_action
# Now we can start zygote for devices with file based encryption
trigger zygote-start
# Remove a file to wake up anything waiting for firmware.
trigger firmware_mounts_complete
trigger early-boot
trigger boot
on early-fs
# Once metadata has been mounted, we'll need vold to deal with userdata checkpointing
start vold
on post-fs
exec - system system -- /system/bin/vdc checkpoint markBootAttempt
# Once everything is setup, no need to modify /.
# The bind+remount combination allows this to work in containers.
mount rootfs rootfs / remount bind ro nodev
# Mount default storage into root namespace
mount none /mnt/runtime/default /storage bind rec
mount none none /storage slave rec
# Make sure /sys/kernel/debug (if present) is labeled properly
# Note that tracefs may be mounted under debug, so we need to cross filesystems
restorecon --recursive --cross-filesystems /sys/kernel/debug
# We chown/chmod /cache again so because mount is run as root + defaults
chown system cache /cache
chmod 0770 /cache
# We restorecon /cache in case the cache partition has been reset.
restorecon_recursive /cache
# Create /cache/recovery in case it's not there. It'll also fix the odd
# permissions if created by the recovery system.
mkdir /cache/recovery 0770 system cache
# Backup/restore mechanism uses the cache partition
mkdir /cache/backup_stage 0700 system system
mkdir /cache/backup 0700 system system
#change permissions on vmallocinfo so we can grab it from bugreports
chown root log /proc/vmallocinfo
chmod 0440 /proc/vmallocinfo
chown root log /proc/slabinfo
chmod 0440 /proc/slabinfo
#change permissions on kmsg & sysrq-trigger so bugreports can grab kthread stacks
chown root system /proc/kmsg
chmod 0440 /proc/kmsg
chown root system /proc/sysrq-trigger
chmod 0220 /proc/sysrq-trigger
chown system log /proc/last_kmsg
chmod 0440 /proc/last_kmsg
# make the selinux kernel policy world-readable
chmod 0444 /sys/fs/selinux/policy
# create the lost+found directories, so as to enforce our permissions
mkdir /cache/lost+found 0770 root root
restorecon_recursive /metadata
mkdir /metadata/vold
chmod 0700 /metadata/vold
mkdir /metadata/password_slots 0771 root system
mkdir /metadata/apex 0700 root system
mkdir /metadata/apex/sessions 0700 root system
on late-fs
# Ensure that tracefs has the correct permissions.
# This does not work correctly if it is called in post-fs.
chmod 0755 /sys/kernel/debug/tracing
# HALs required before storage encryption can get unlocked (FBE/FDE)
class_start early_hal
on post-fs-data
mark_post_data
# Start checkpoint before we touch data
start vold
exec - system system -- /system/bin/vdc checkpoint prepareCheckpoint
# We chown/chmod /data again so because mount is run as root + defaults
chown system system /data
chmod 0771 /data
# We restorecon /data in case the userdata partition has been reset.
restorecon /data
# Make sure we have the device encryption key.
installkey /data
# Start bootcharting as soon as possible after the data partition is
# mounted to collect more data.
mkdir /data/bootchart 0755 shell shell
bootchart start
# Load fsverity keys. This needs to happen before apexd, as post-install of
# APEXes may rely on keys.
exec -- /system/bin/fsverity_init
# Make sure that apexd is started in the default namespace
enter_default_mount_ns
# /data/apex is now available. Start apexd to scan and activate APEXes.
mkdir /data/apex 0750 root system
mkdir /data/apex/active 0750 root system
mkdir /data/apex/backup 0700 root system
mkdir /data/apex/sessions 0700 root system
mkdir /data/app-staging 0750 system system
start apexd
# Avoid predictable entropy pool. Carry over entropy from previous boot.
copy /data/system/entropy.dat /dev/urandom
# create basic filesystem structure
mkdir /data/misc 01771 system misc
mkdir /data/misc/recovery 0770 system log
copy /data/misc/recovery/ro.build.fingerprint /data/misc/recovery/ro.build.fingerprint.1
chmod 0440 /data/misc/recovery/ro.build.fingerprint.1
chown system log /data/misc/recovery/ro.build.fingerprint.1
write /data/misc/recovery/ro.build.fingerprint ${ro.build.fingerprint}
chmod 0440 /data/misc/recovery/ro.build.fingerprint
chown system log /data/misc/recovery/ro.build.fingerprint
mkdir /data/misc/recovery/proc 0770 system log
copy /data/misc/recovery/proc/version /data/misc/recovery/proc/version.1
chmod 0440 /data/misc/recovery/proc/version.1
chown system log /data/misc/recovery/proc/version.1
copy /proc/version /data/misc/recovery/proc/version
chmod 0440 /data/misc/recovery/proc/version
chown system log /data/misc/recovery/proc/version
mkdir /data/misc/bluedroid 02770 bluetooth bluetooth
# Fix the access permissions and group ownership for 'bt_config.conf'
chmod 0660 /data/misc/bluedroid/bt_config.conf
chown bluetooth bluetooth /data/misc/bluedroid/bt_config.conf
mkdir /data/misc/bluetooth 0770 bluetooth bluetooth
mkdir /data/misc/bluetooth/logs 0770 bluetooth bluetooth
mkdir /data/misc/keystore 0700 keystore keystore
mkdir /data/misc/gatekeeper 0700 system system
mkdir /data/misc/keychain 0771 system system
mkdir /data/misc/net 0750 root shell
mkdir /data/misc/radio 0770 system radio
mkdir /data/misc/sms 0770 system radio
mkdir /data/misc/carrierid 0770 system radio
mkdir /data/misc/apns 0770 system radio
mkdir /data/misc/zoneinfo 0775 system system
mkdir /data/misc/network_watchlist 0774 system system
mkdir /data/misc/textclassifier 0771 system system
mkdir /data/misc/vpn 0770 system vpn
mkdir /data/misc/shared_relro 0771 shared_relro shared_relro
mkdir /data/misc/systemkeys 0700 system system
mkdir /data/misc/wifi 0770 wifi wifi
mkdir /data/misc/wifi/sockets 0770 wifi wifi
mkdir /data/misc/wifi/wpa_supplicant 0770 wifi wifi
mkdir /data/misc/ethernet 0770 system system
mkdir /data/misc/dhcp 0770 dhcp dhcp
mkdir /data/misc/user 0771 root root
mkdir /data/misc/perfprofd 0775 root root
# give system access to wpa_supplicant.conf for backup and restore
chmod 0660 /data/misc/wifi/wpa_supplicant.conf
mkdir /data/local 0751 root root
mkdir /data/misc/media 0700 media media
mkdir /data/misc/audioserver 0700 audioserver audioserver
mkdir /data/misc/cameraserver 0700 cameraserver cameraserver
mkdir /data/misc/vold 0700 root root
mkdir /data/misc/boottrace 0771 system shell
mkdir /data/misc/update_engine 0700 root root
mkdir /data/misc/update_engine_log 02750 root log
mkdir /data/misc/trace 0700 root root
# create location to store surface and window trace files
mkdir /data/misc/wmtrace 0700 system system
# profile file layout
mkdir /data/misc/profiles 0771 system system
mkdir /data/misc/profiles/cur 0771 system system
mkdir /data/misc/profiles/ref 0771 system system
mkdir /data/misc/profman 0770 system shell
mkdir /data/misc/gcov 0770 root root
mkdir /data/preloads 0775 system system
mkdir /data/vendor 0771 root root
mkdir /data/vendor_ce 0771 root root
mkdir /data/vendor_de 0771 root root
mkdir /data/vendor/hardware 0771 root root
# For security reasons, /data/local/tmp should always be empty.
# Do not place files or directories in /data/local/tmp
mkdir /data/local/tmp 0771 shell shell
mkdir /data/local/traces 0777 shell shell
mkdir /data/data 0771 system system
mkdir /data/app-private 0771 system system
mkdir /data/app-ephemeral 0771 system system
mkdir /data/app-asec 0700 root root
mkdir /data/app-lib 0771 system system
mkdir /data/app 0771 system system
mkdir /data/property 0700 root root
mkdir /data/tombstones 0771 system system
mkdir /data/vendor/tombstones 0771 root root
mkdir /data/vendor/tombstones/wifi 0771 wifi wifi
# create dalvik-cache, so as to enforce our permissions
mkdir /data/dalvik-cache 0771 root root
# create the A/B OTA directory, so as to enforce our permissions
mkdir /data/ota 0771 root root
# create the OTA package directory. It will be accessed by GmsCore (cache
# group), update_engine and update_verifier.
mkdir /data/ota_package 0770 system cache
# create resource-cache and double-check the perms
mkdir /data/resource-cache 0771 system system
chown system system /data/resource-cache
chmod 0771 /data/resource-cache
# create the lost+found directories, so as to enforce our permissions
mkdir /data/lost+found 0770 root root
# create directory for DRM plug-ins - give drm the read/write access to
# the following directory.
mkdir /data/drm 0770 drm drm
# create directory for MediaDrm plug-ins - give drm the read/write access to
# the following directory.
mkdir /data/mediadrm 0770 mediadrm mediadrm
mkdir /data/anr 0775 system system
# NFC: create data/nfc for nv storage
mkdir /data/nfc 0770 nfc nfc
mkdir /data/nfc/param 0770 nfc nfc
# Create all remaining /data root dirs so that they are made through init
# and get proper encryption policy installed
mkdir /data/backup 0700 system system
mkdir /data/ss 0700 system system
mkdir /data/system 0775 system system
mkdir /data/system/dropbox 0700 system system
mkdir /data/system/heapdump 0700 system system
mkdir /data/system/users 0775 system system
mkdir /data/system_de 0770 system system
mkdir /data/system_ce 0770 system system
mkdir /data/misc_de 01771 system misc
mkdir /data/misc_ce 01771 system misc
mkdir /data/user 0711 system system
mkdir /data/user_de 0711 system system
symlink /data/data /data/user/0
mkdir /data/media 0770 media_rw media_rw
mkdir /data/media/obb 0770 media_rw media_rw
mkdir /data/cache 0770 system cache
mkdir /data/cache/recovery 0770 system cache
mkdir /data/cache/backup_stage 0700 system system
mkdir /data/cache/backup 0700 system system
# Wait for apexd to finish activating APEXes before starting more processes.
wait_for_prop apexd.status ready
parse_apex_configs
init_user0
# Set SELinux security contexts on upgrade or policy update.
restorecon --recursive --skip-ce /data
# Check any timezone data in /data is newer than the copy in the runtime module, delete if not.
exec - system system -- /system/bin/tzdatacheck /apex/com.android.runtime/etc/tz /data/misc/zoneinfo
# If there is no post-fs-data action in the init.<device>.rc file, you
# must uncomment this line, otherwise encrypted filesystems
# won't work.
# Set indication (checked by vold) that we have finished this action
#setprop vold.post_fs_data_done 1
# sys.memfd_use set to false by default, which keeps it disabled
# until it is confirmed that apps and vendor processes don't make
# IOCTLs on ashmem fds any more.
setprop sys.use_memfd false
# Set fscklog permission
chown root system /dev/fscklogs/log
chmod 0770 /dev/fscklogs/log
# It is recommended to put unnecessary data/ initialization from post-fs-data
# to start-zygote in device's init.rc to unblock zygote start.
on zygote-start && property:ro.crypto.state=unencrypted
# A/B update verifier that marks a successful boot.
exec_start update_verifier_nonencrypted
start netd
start zygote
start zygote_secondary
on zygote-start && property:ro.crypto.state=unsupported
# A/B update verifier that marks a successful boot.
exec_start update_verifier_nonencrypted
start netd
start zygote
start zygote_secondary
on zygote-start && property:ro.crypto.state=encrypted && property:ro.crypto.type=file
# A/B update verifier that marks a successful boot.
exec_start update_verifier_nonencrypted
start netd
start zygote
start zygote_secondary
on boot
# basic network init
ifup lo
hostname localhost
domainname localdomain
# IPsec SA default expiration length
write /proc/sys/net/core/xfrm_acq_expires 3600
# Memory management. Basic kernel parameters, and allow the high
# level system server to be able to adjust the kernel OOM driver
# parameters to match how it is managing things.
write /proc/sys/vm/overcommit_memory 1
write /proc/sys/vm/min_free_order_shift 4
chown root system /sys/module/lowmemorykiller/parameters/adj
chmod 0664 /sys/module/lowmemorykiller/parameters/adj
chown root system /sys/module/lowmemorykiller/parameters/minfree
chmod 0664 /sys/module/lowmemorykiller/parameters/minfree
# System server manages zram writeback
chown root system /sys/block/zram0/idle
chmod 0664 /sys/block/zram0/idle
chown root system /sys/block/zram0/writeback
chmod 0664 /sys/block/zram0/writeback
# Tweak background writeout
write /proc/sys/vm/dirty_expire_centisecs 200
write /proc/sys/vm/dirty_background_ratio 5
# F2FS tuning. Set cp_interval larger than dirty_expire_centisecs
# to avoid power consumption when system becomes mostly idle. Be careful
# to make it too large, since it may bring userdata loss, if they
# are not aware of using fsync()/sync() to prepare sudden power-cut.
write /sys/fs/f2fs/${dev.mnt.blk.data}/cp_interval 200
write /sys/fs/f2fs/${dev.mnt.blk.data}/gc_urgent_sleep_time 50
# limit discard size to 128MB in order to avoid long IO latency
# for filesystem tuning first (dm or sda)
# Note that, if dm-<num> is used, sda/mmcblk0 should be tuned in vendor/init.rc
write /sys/devices/virtual/block/${dev.mnt.blk.data}/queue/discard_max_bytes 134217728
# Permissions for System Server and daemons.
chown radio system /sys/android_power/state
chown radio system /sys/android_power/request_state
chown radio system /sys/android_power/acquire_full_wake_lock
chown radio system /sys/android_power/acquire_partial_wake_lock
chown radio system /sys/android_power/release_wake_lock
chown system system /sys/power/autosleep
chown radio wakelock /sys/power/wake_lock
chown radio wakelock /sys/power/wake_unlock
chmod 0660 /sys/power/wake_lock
chmod 0660 /sys/power/wake_unlock
chown system system /sys/devices/system/cpu/cpufreq/interactive/timer_rate
chmod 0660 /sys/devices/system/cpu/cpufreq/interactive/timer_rate
chown system system /sys/devices/system/cpu/cpufreq/interactive/timer_slack
chmod 0660 /sys/devices/system/cpu/cpufreq/interactive/timer_slack
chown system system /sys/devices/system/cpu/cpufreq/interactive/min_sample_time
chmod 0660 /sys/devices/system/cpu/cpufreq/interactive/min_sample_time
chown system system /sys/devices/system/cpu/cpufreq/interactive/hispeed_freq
chmod 0660 /sys/devices/system/cpu/cpufreq/interactive/hispeed_freq
chown system system /sys/devices/system/cpu/cpufreq/interactive/target_loads
chmod 0660 /sys/devices/system/cpu/cpufreq/interactive/target_loads
chown system system /sys/devices/system/cpu/cpufreq/interactive/go_hispeed_load
chmod 0660 /sys/devices/system/cpu/cpufreq/interactive/go_hispeed_load
chown system system /sys/devices/system/cpu/cpufreq/interactive/above_hispeed_delay
chmod 0660 /sys/devices/system/cpu/cpufreq/interactive/above_hispeed_delay
chown system system /sys/devices/system/cpu/cpufreq/interactive/boost
chmod 0660 /sys/devices/system/cpu/cpufreq/interactive/boost
chown system system /sys/devices/system/cpu/cpufreq/interactive/boostpulse
chown system system /sys/devices/system/cpu/cpufreq/interactive/input_boost
chmod 0660 /sys/devices/system/cpu/cpufreq/interactive/input_boost
chown system system /sys/devices/system/cpu/cpufreq/interactive/boostpulse_duration
chmod 0660 /sys/devices/system/cpu/cpufreq/interactive/boostpulse_duration
chown system system /sys/devices/system/cpu/cpufreq/interactive/io_is_busy
chmod 0660 /sys/devices/system/cpu/cpufreq/interactive/io_is_busy
# Assume SMP uses shared cpufreq policy for all CPUs
chown system system /sys/devices/system/cpu/cpu0/cpufreq/scaling_max_freq
chmod 0660 /sys/devices/system/cpu/cpu0/cpufreq/scaling_max_freq
chown system system /sys/class/leds/vibrator/trigger
chown system system /sys/class/leds/vibrator/activate
chown system system /sys/class/leds/vibrator/brightness
chown system system /sys/class/leds/vibrator/duration
chown system system /sys/class/leds/vibrator/state
chown system system /sys/class/timed_output/vibrator/enable
chown system system /sys/class/leds/keyboard-backlight/brightness
chown system system /sys/class/leds/lcd-backlight/brightness
chown system system /sys/class/leds/button-backlight/brightness
chown system system /sys/class/leds/jogball-backlight/brightness
chown system system /sys/class/leds/red/brightness
chown system system /sys/class/leds/green/brightness
chown system system /sys/class/leds/blue/brightness
chown system system /sys/class/leds/red/device/grpfreq
chown system system /sys/class/leds/red/device/grppwm
chown system system /sys/class/leds/red/device/blink
chown system system /sys/module/sco/parameters/disable_esco
chown system system /sys/kernel/ipv4/tcp_wmem_min
chown system system /sys/kernel/ipv4/tcp_wmem_def
chown system system /sys/kernel/ipv4/tcp_wmem_max
chown system system /sys/kernel/ipv4/tcp_rmem_min
chown system system /sys/kernel/ipv4/tcp_rmem_def
chown system system /sys/kernel/ipv4/tcp_rmem_max
chown root radio /proc/cmdline
# Define default initial receive window size in segments.
setprop net.tcp.default_init_rwnd 60
# Start standard binderized HAL daemons
class_start hal
class_start core
on nonencrypted
class_start main
class_start late_start
on property:sys.init_log_level=*
loglevel ${sys.init_log_level}
on charger
class_start charger
on property:vold.decrypt=trigger_load_persist_props
load_persist_props
start logd
start logd-reinit
on property:vold.decrypt=trigger_post_fs_data
trigger post-fs-data
trigger zygote-start
on property:vold.decrypt=trigger_restart_min_framework
# A/B update verifier that marks a successful boot.
exec_start update_verifier
class_start main
on property:vold.decrypt=trigger_restart_framework
# A/B update verifier that marks a successful boot.
exec_start update_verifier
class_start_post_data hal
class_start_post_data core
class_start main
class_start late_start
setprop service.bootanim.exit 0
start bootanim
on property:vold.decrypt=trigger_shutdown_framework
class_reset late_start
class_reset main
class_reset_post_data core
class_reset_post_data hal
on property:sys.boot_completed=1
bootchart stop
# Setup per_boot directory so other .rc could start to use it on boot_completed
exec - system system -- /bin/rm -rf /data/per_boot
mkdir /data/per_boot 0700 system system
# system server cannot write to /proc/sys files,
# and chown/chmod does not work for /proc/sys/ entries.
# So proxy writes through init.
on property:sys.sysctl.extra_free_kbytes=*
write /proc/sys/vm/extra_free_kbytes ${sys.sysctl.extra_free_kbytes}
# "tcp_default_init_rwnd" Is too long!
on property:sys.sysctl.tcp_def_init_rwnd=*
write /proc/sys/net/ipv4/tcp_default_init_rwnd ${sys.sysctl.tcp_def_init_rwnd}
on property:security.perf_harden=0
write /proc/sys/kernel/perf_event_paranoid 1
write /proc/sys/kernel/perf_event_max_sample_rate ${debug.perf_event_max_sample_rate:-100000}
write /proc/sys/kernel/perf_cpu_time_max_percent ${debug.perf_cpu_time_max_percent:-25}
write /proc/sys/kernel/perf_event_mlock_kb ${debug.perf_event_mlock_kb:-516}
on property:security.perf_harden=1
write /proc/sys/kernel/perf_event_paranoid 3
# on shutdown
# In device's init.rc, this trigger can be used to do device-specific actions
# before shutdown. e.g disable watchdog and mask error handling
## Daemon processes to be run by init.
##
service ueventd /system/bin/ueventd
class core
critical
seclabel u:r:ueventd:s0
shutdown critical
service console /system/bin/sh
class core
console
disabled
user shell
group shell log readproc
seclabel u:r:shell:s0
setenv HOSTNAME console
on property:ro.debuggable=1
# Give writes to anyone for the trace folder on debug builds.
# The folder is used to store method traces.
chmod 0773 /data/misc/trace
# Give reads to anyone for the window trace folder on debug builds.
chmod 0775 /data/misc/wmtrace
start console
service flash_recovery /system/bin/install-recovery.sh
class main
oneshot
三、总结
init进程主要功能:
- 挂载系统文件
- 设置SELinux,并且加载SELinux安全策略文件
- 解析运行init.rc文件