usb_cam 相机ROS配置
文章目录
- 运行环境:
- 1.1 usb_cam连接方式:
- 1.2 ROS包下载和编译
- 1.2 运行电脑自带cam
- 1.3 修改launch文件
- 1)不插入 usb_cam 编号查询
- 2)插入 usb_cam 编号查询
- 1.4 运行usb_cam
- 2.1 Rviz显示
运行环境:
ubuntu20.04 noetic
usb_cam
宏基暗影骑士笔记本
1.1 usb_cam连接方式:
1)相机usb--电脑usb1.2 ROS包下载和编译
# 创建工作空间
mkdir -p usb_cam_ws/src
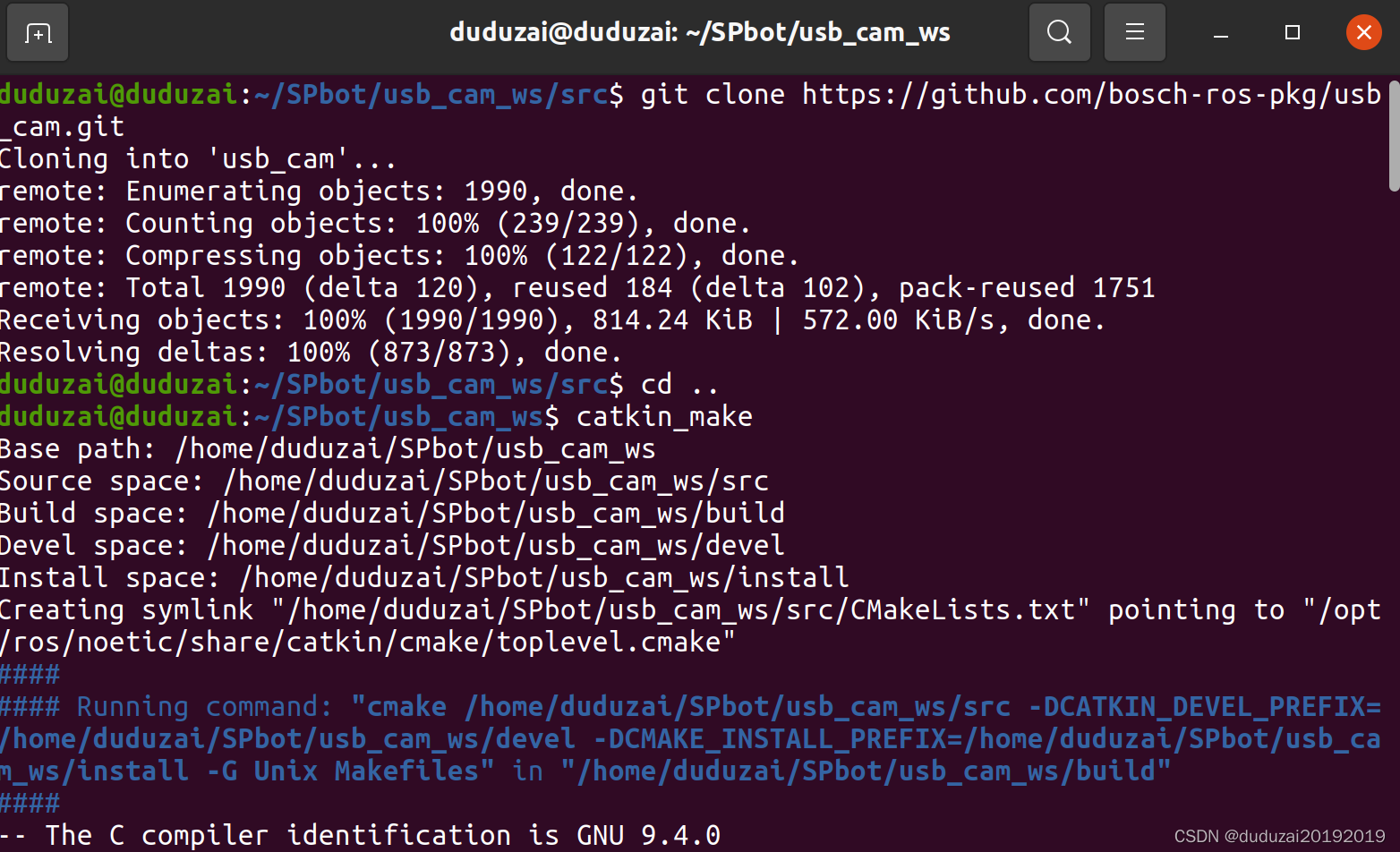
# 克隆仓库
cd usb_cam_ws/src
git clone https://github.com/bosch-ros-pkg/usb_cam.git
# 编译
cd ..
catkin_make
1.2 运行电脑自带cam
source ./devel/setup.bash
roslaunch usb_cam usb_cam-test.launch
1.3 修改launch文件
1)不插入 usb_cam 编号查询
ls /dev/video*
2)插入 usb_cam 编号查询
ls /dev/video*
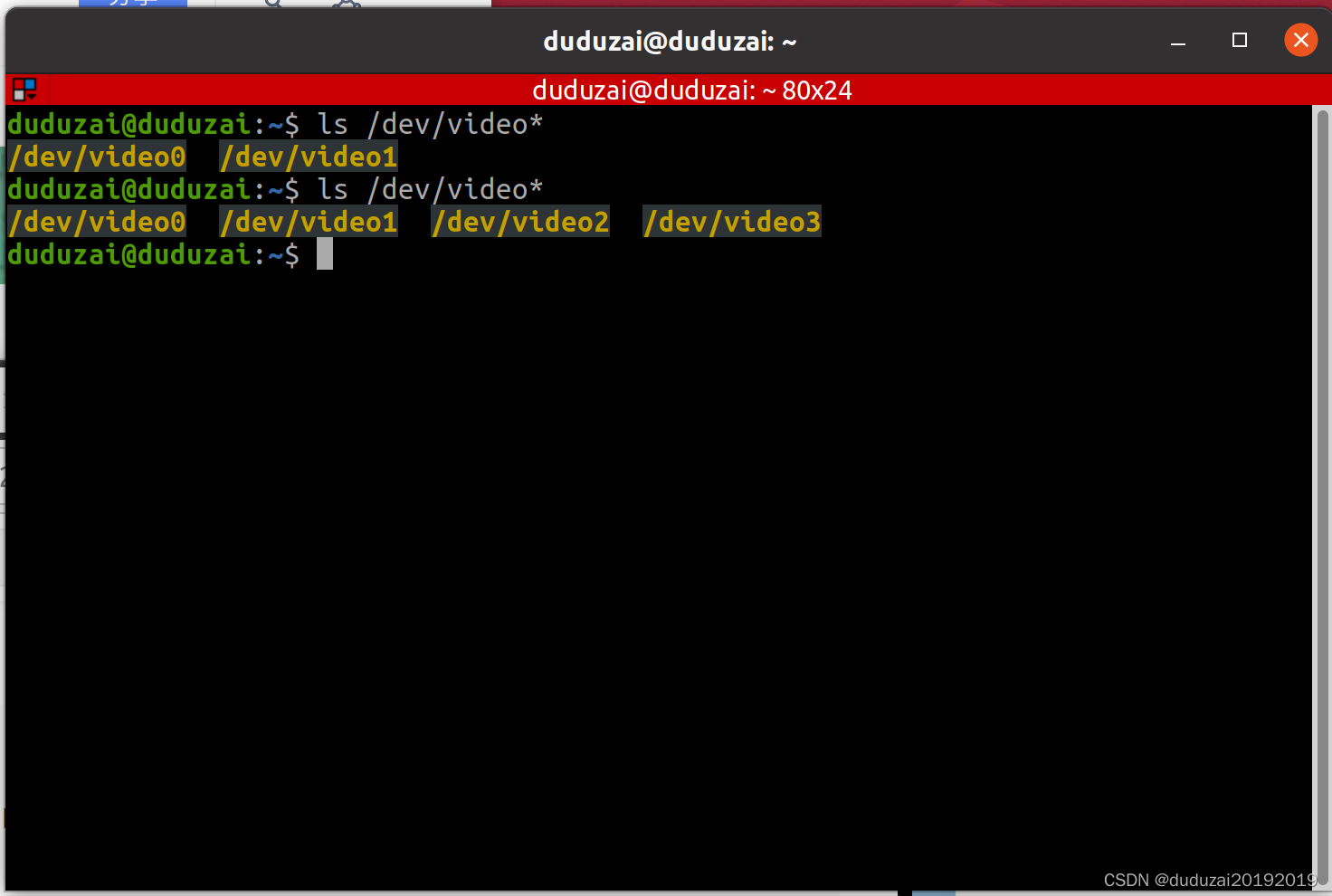
电脑自带的是video0和video1,外置相机是video2和video3
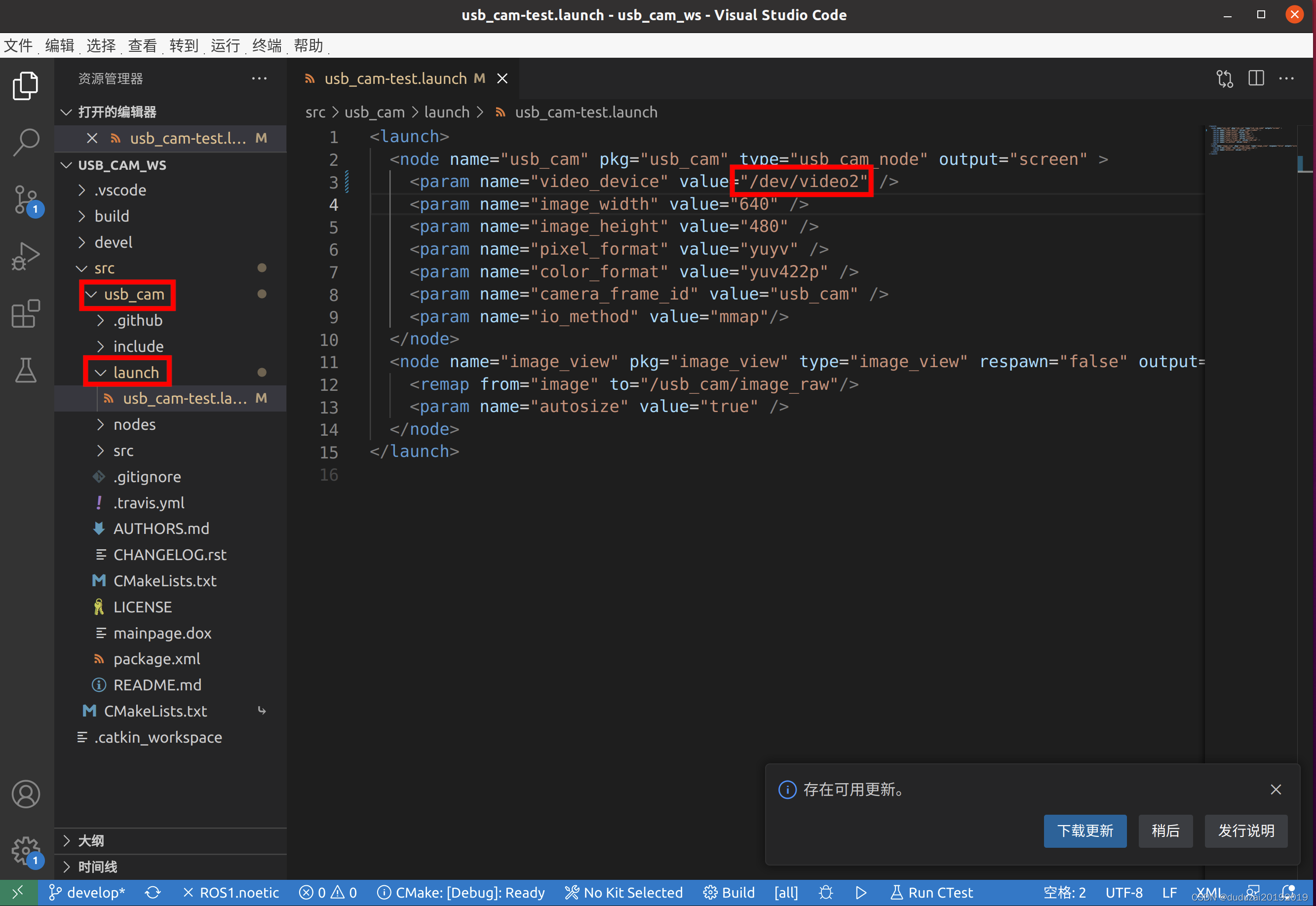
所以要运行 usb_cam 需要将video0为video2
修改目录:usb_cam / launch
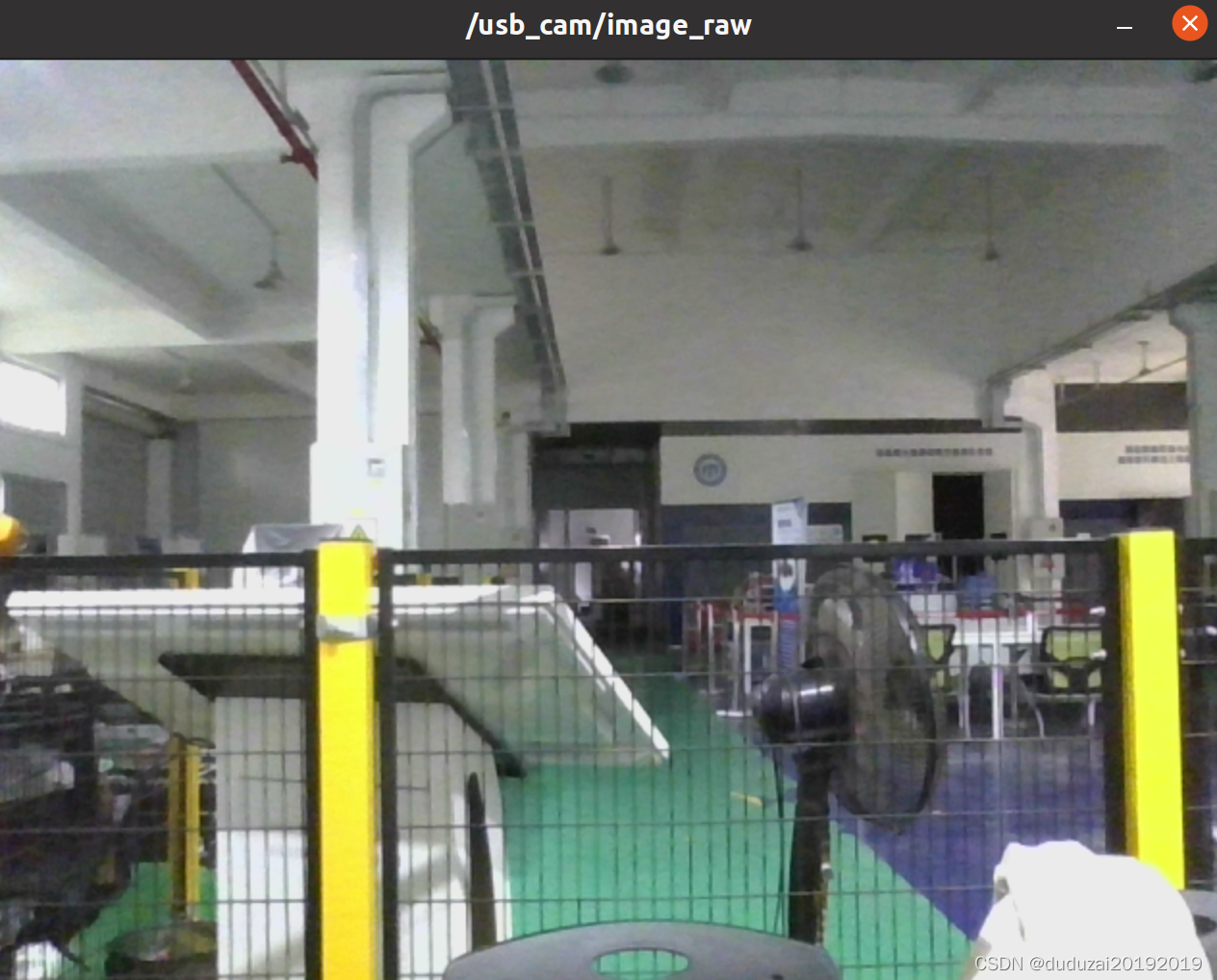
1.4 运行usb_cam
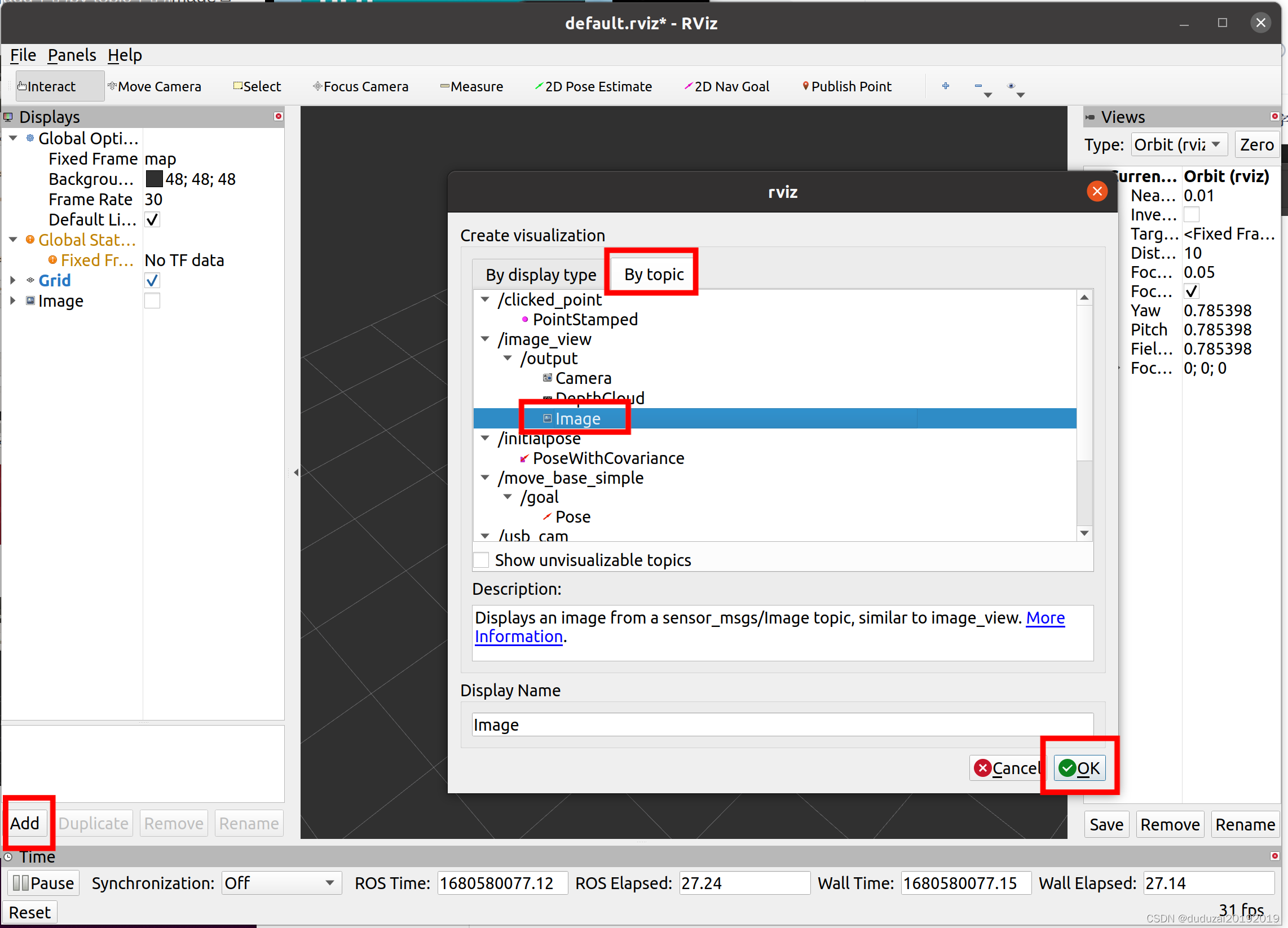
Add–Bytopic–Image–OK
source ./devel/setup.bash
roslaunch usb_cam usb_cam-test.launch

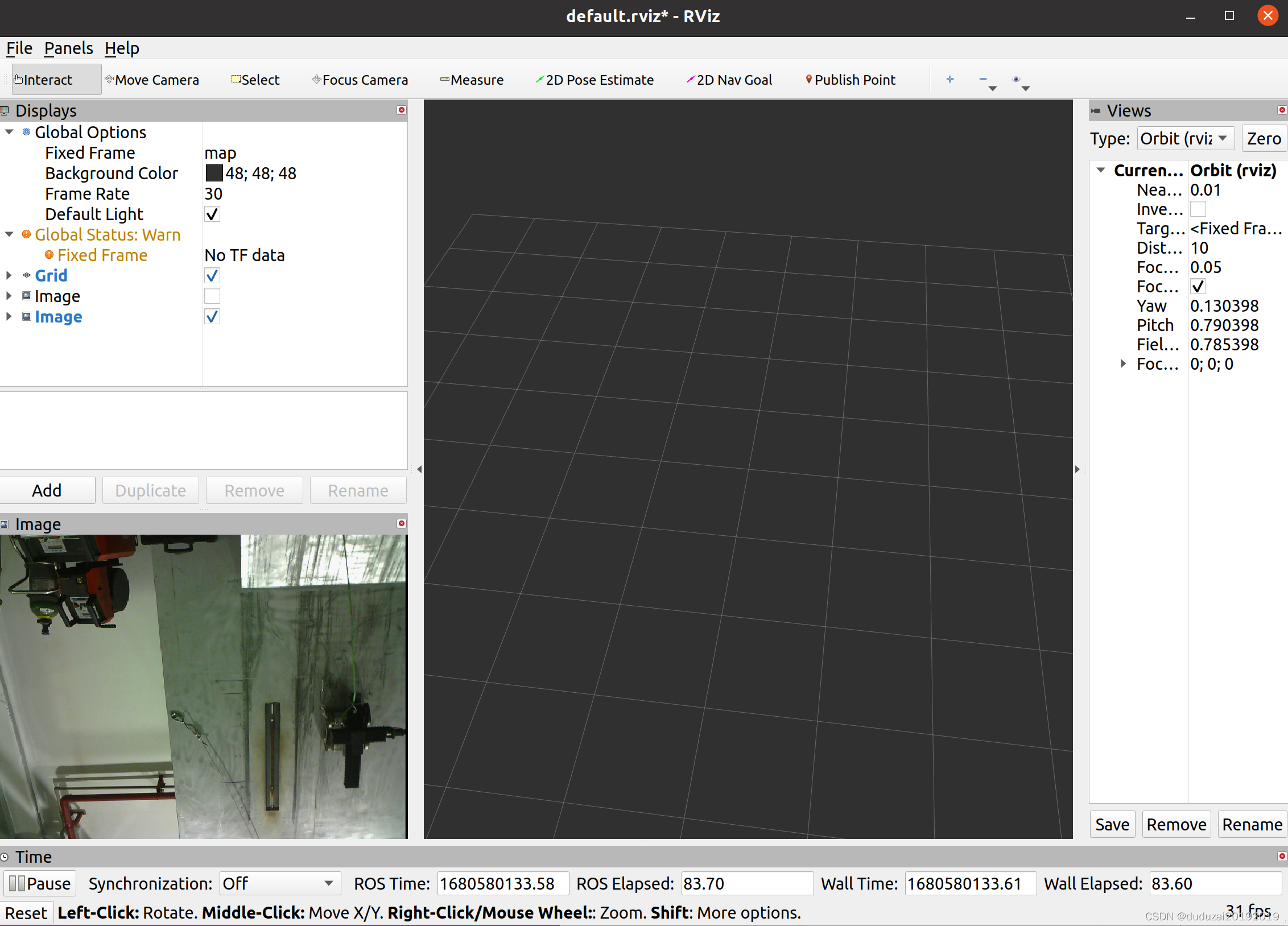
2.1 Rviz显示