ROS1学习笔记:常用可视化工具的使用(ubuntu20.04)
参考B站古月居ROS入门21讲:常用可视化工具的实现
基于VMware Ubuntu 20.04 Noetic版本的环境
文章目录
- 一、日志输出工具:rqt_console
- 二、绘制数据曲线:rqt_plot
- 三、 图像渲染工具:rqt_image_view
- 四、图形界面总接口:rqt
- 五、Rviz
- 六、Gazebo
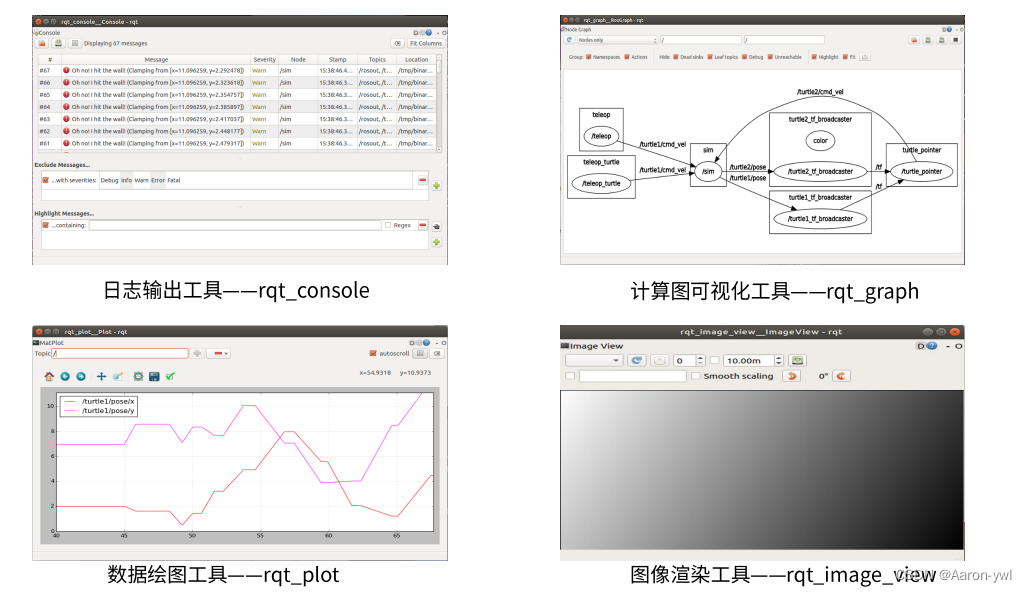
在之前已经介绍过一种ROS的可视化工具:rqt_graph
本节将介绍其他常见的工具。
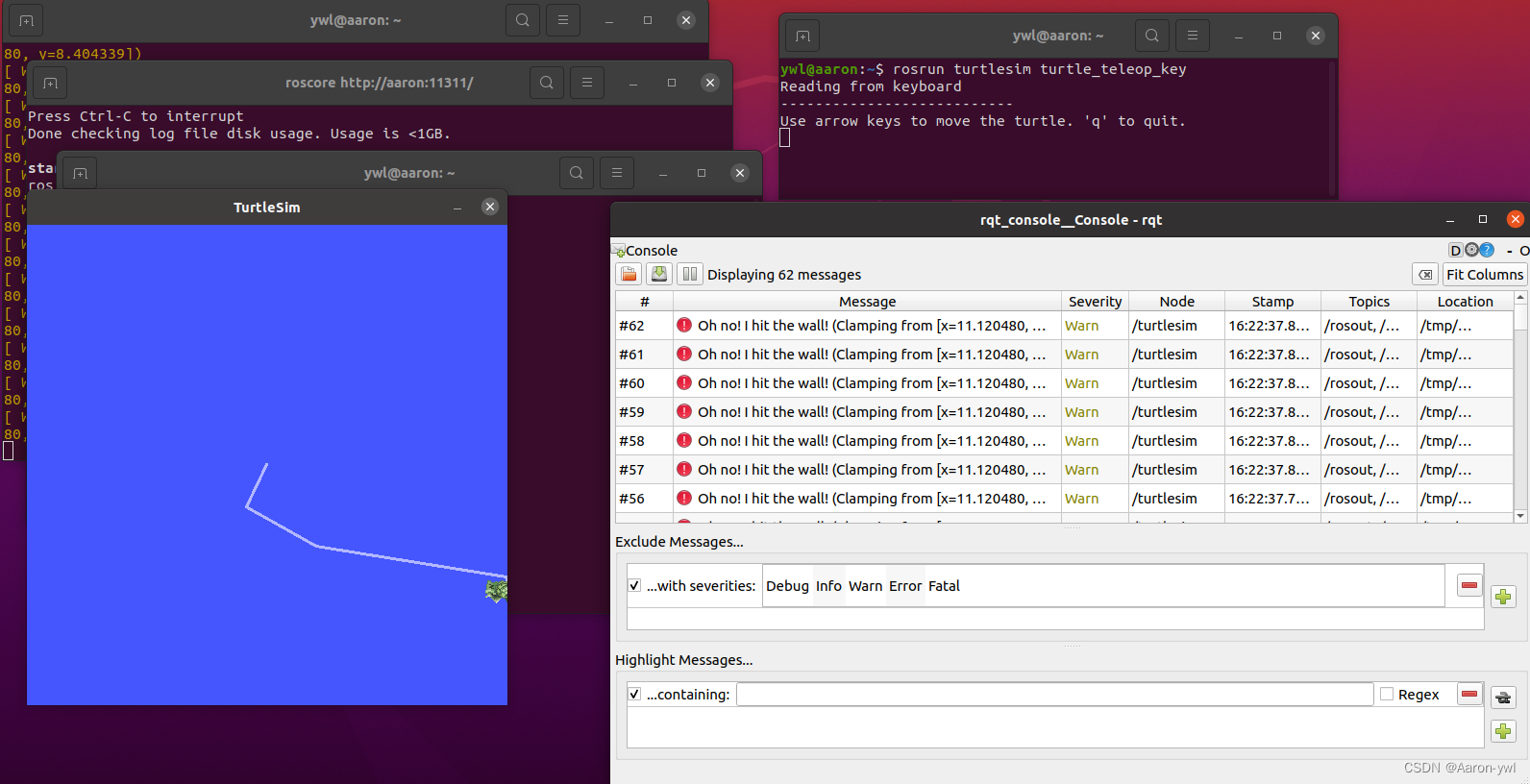
一、日志输出工具:rqt_console
启动小海龟仿真器节点:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
rqt_console
让小海龟撞上南墙,日至输出工具就会将日志信息显示出来:
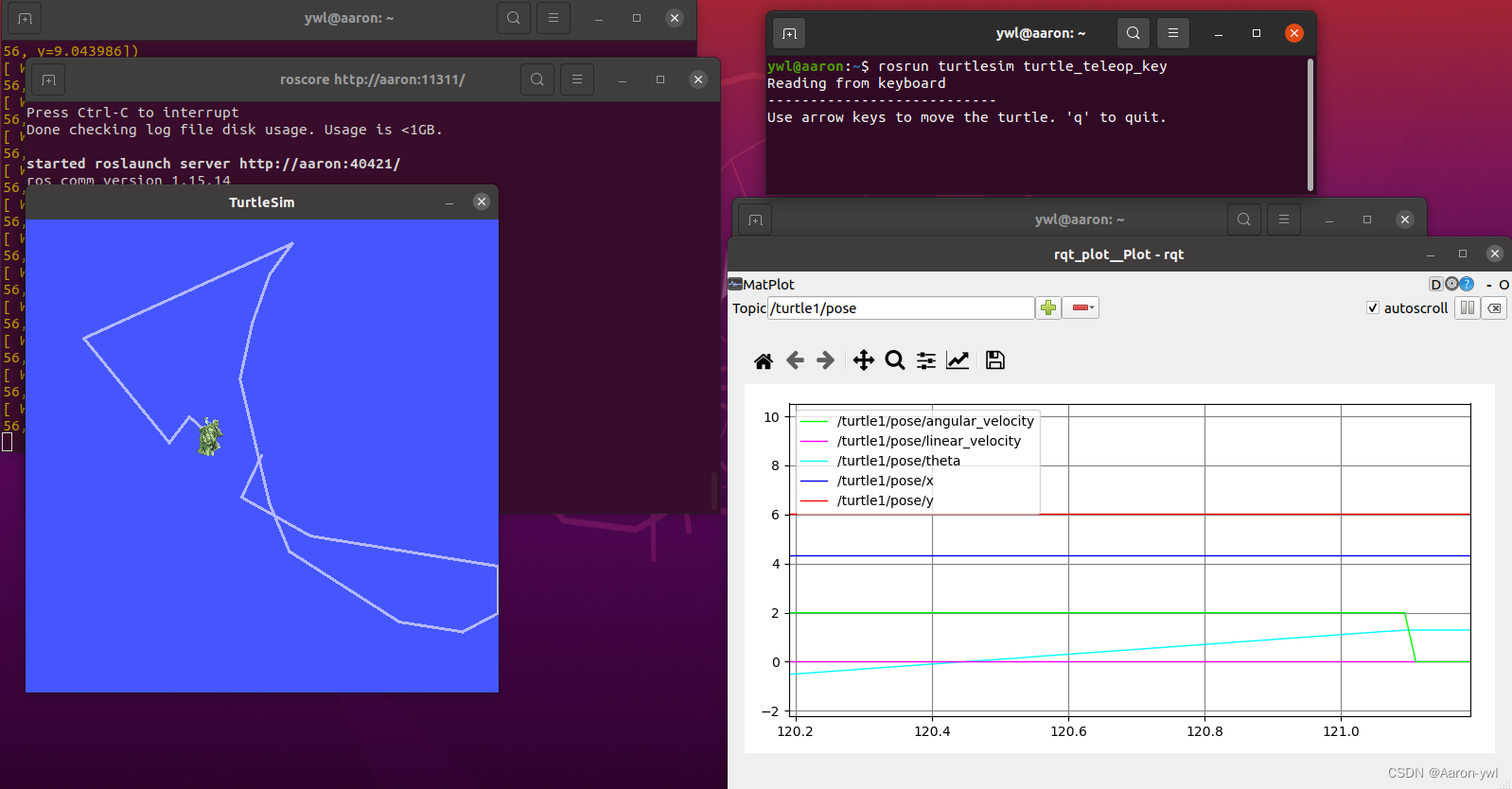
二、绘制数据曲线:rqt_plot
之前已经打开过小海龟的仿真器节点
rqt_plot
在输入框中输入左斜杠/可以看到自动填充项,我们选择 /turtle1/pose 按回车,就会显示位置信息的实时情况。
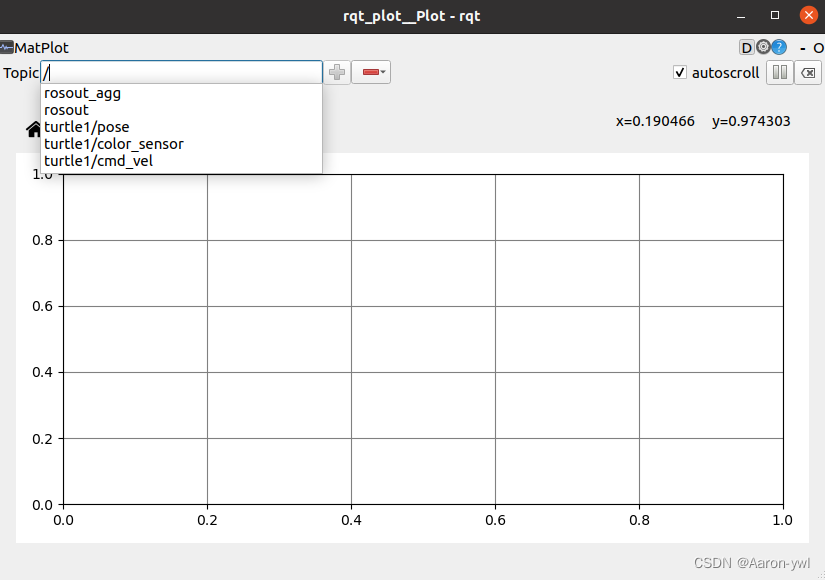
移动小海龟,位置曲线就会发生变化:
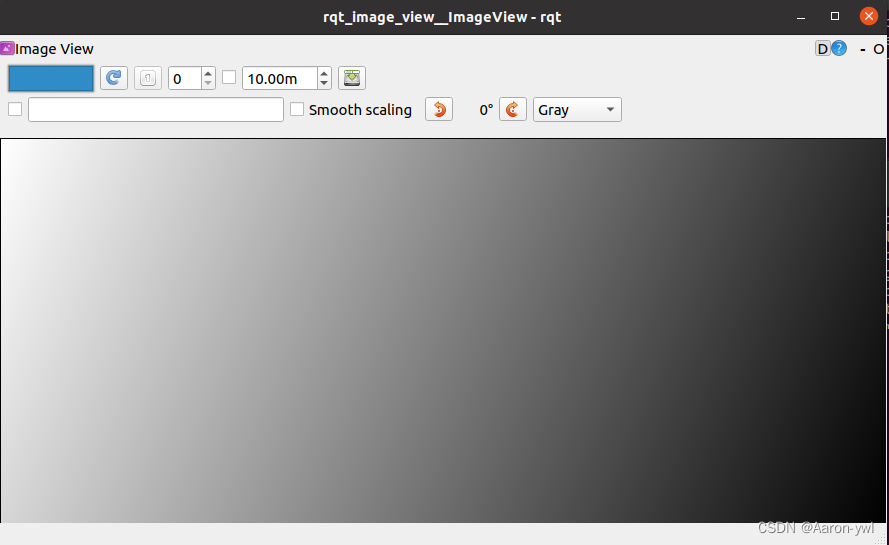
三、 图像渲染工具:rqt_image_view
这是关于相机的图像数据的插件,可查看摄像头的图像:
rqt_image_view
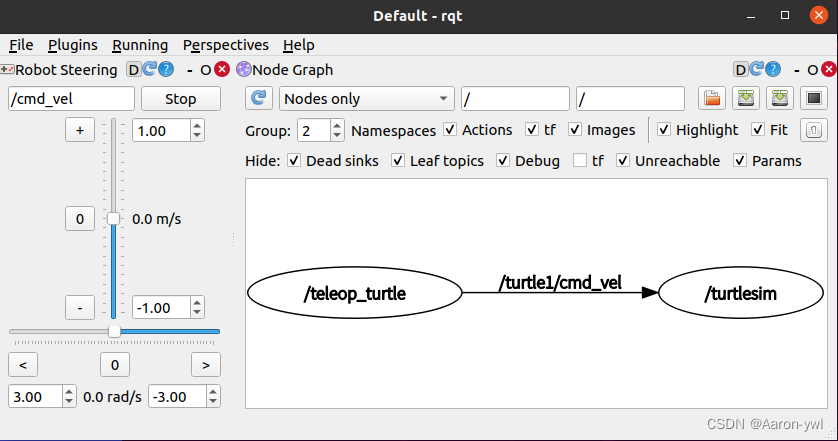
四、图形界面总接口:rqt
我们直接输入rqt可以打开图形界面总接口
我们可以在Plugin菜单下面打开各种图形界面的小工具,分块显示在下方。
前面介绍的这些Qt工具包都可以在这里找到。
rqt
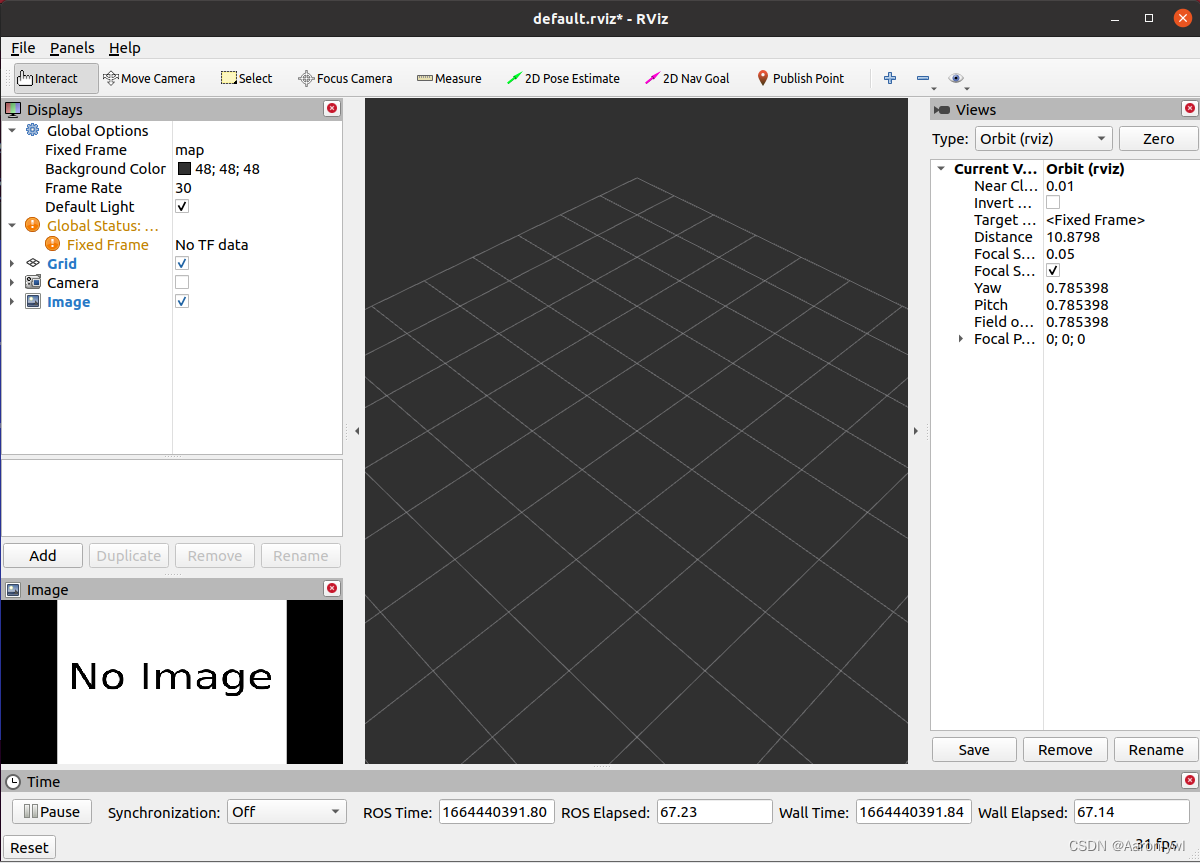
五、Rviz
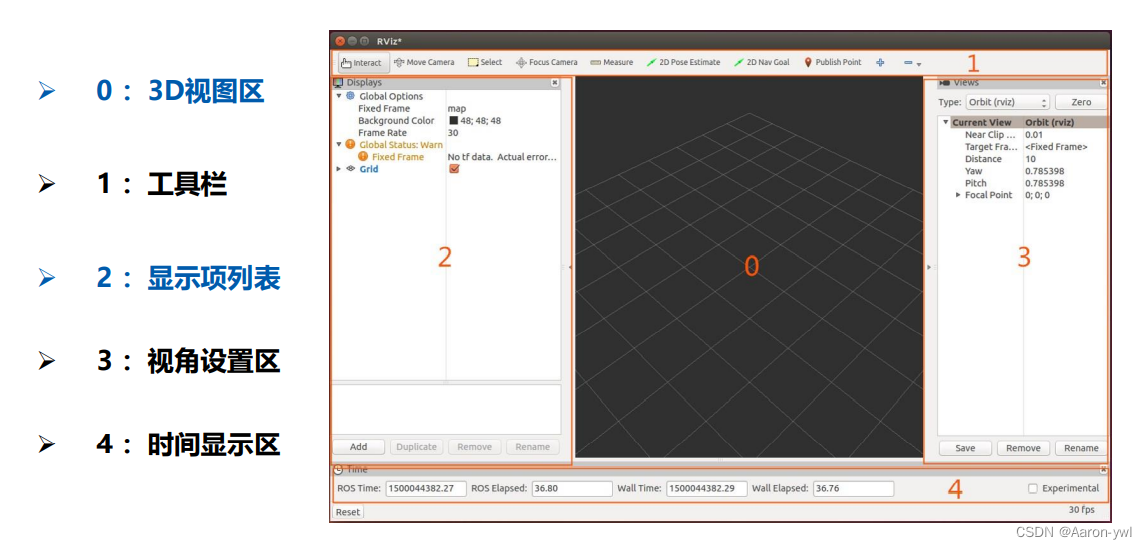
打开Rviz:
rosrun rviz rviz
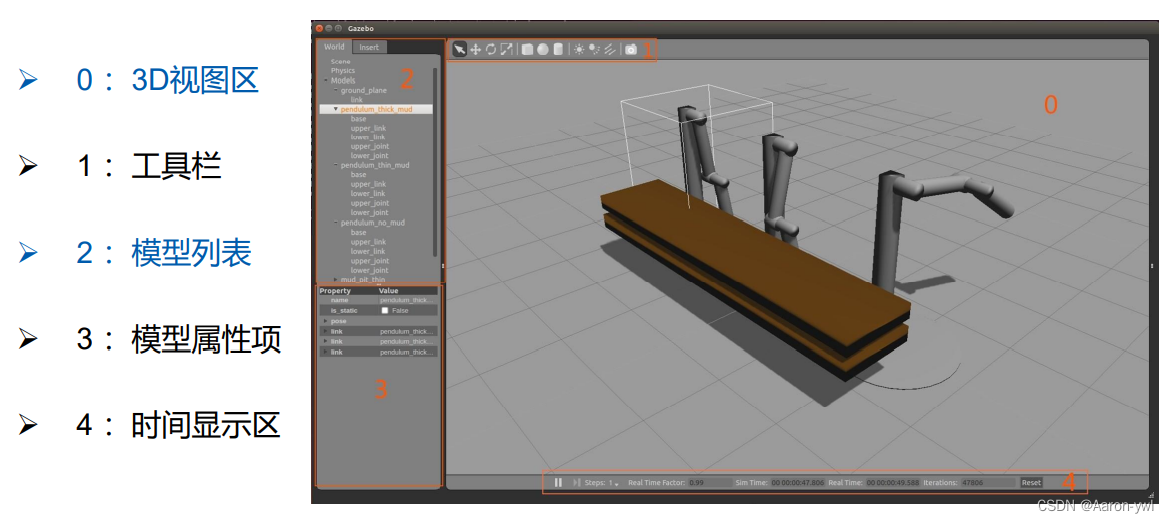
六、Gazebo