【飞控调试】DJIF450机架+Pixhawk6c mini+v1.13.3固件+好盈Platinium 40A电调无人机调试
1 背景
由于使用了一种新的航电设备组合,在调试无人机起飞的时候遇到了之前没有遇到的问题。之前用的飞控(Pixhawk 6c)和电调(Hobbywing X-Rotor 40A),在QGC里按默认参数配置来基本就能平稳飞行,但是换了飞控(Pixhawk6c mini)和电调(好盈Platinium 40A)后,起飞一小段高度就开始抖动,且幅度逐渐增大到发散,最后炸机。
2 调试思路
debug的时候先是检查了硬件,排除硬件问题后,调整了部分跟PWM输出相关的关键参数,还是不行,进一步怀疑是PID参数的问题,按照网上的经验调试,发现果然如此,调整了参数后,姿态可以稳定下来了。所以将过程记录如下,便于以后查找。
3 无人机配置
所用的主要部件如下表所示:
| 部件 | 型号 |
|---|---|
| 机架 | DJI F450 |
| 飞控 | Pixhawk 6c mini |
| GPS | 飞控配套GPS |
| 固件 | PX4 V1.13.3 |
| 电机 | 朗宇Sunnysky X2216-7 KV1250III |
| 电调 | 好盈Hobbywing Platinium 40A |
| 电池 | 格氏电池 4000Ah-30C-14.8V-4S1P |
| 旋翼 | APC MR9045 |
| 遥控器 | Futaba T14SG |
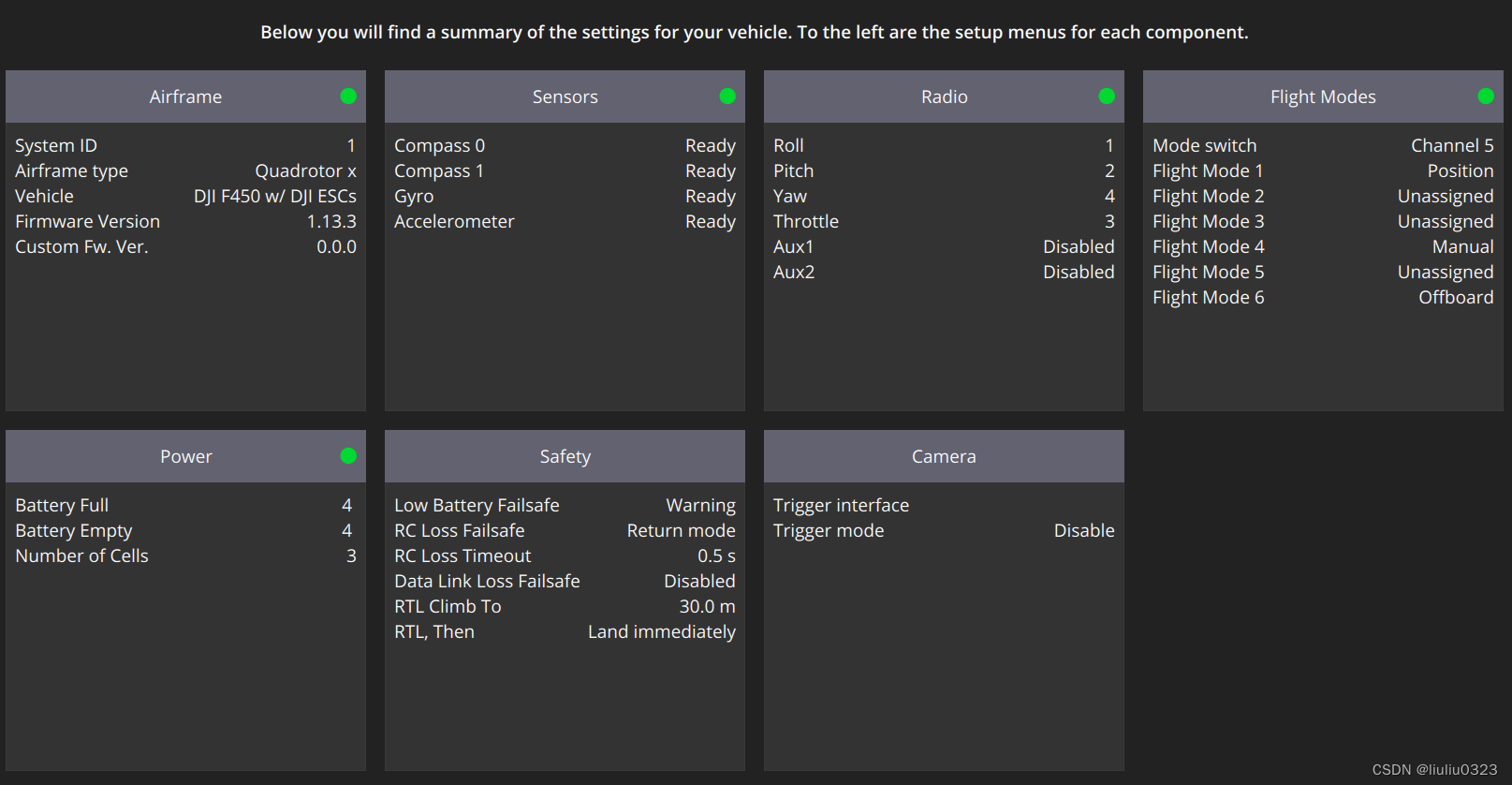
QGC summary界面如下:
4 配置要点
配置使用QGC作为地面站,校准传感器和遥控器等基础操作这里省略,本节只对关键内容作介绍和记录。
4.1 机型
实际使用的是DJI F450。一开始选择的是Generic Quadcopter,但是发现使用该airframe,在arm的时候就会抖动得很厉害,所以将机型选为DJI F450。

4.2 固件
使用的是v1.13.3,不知道为啥,虽然下载固件时提示的是v1.14.0,但是下载之后却是v1.13.3。Github上clone下来的v1.14.0会炸机,暂时不清楚原因。
4.3 电调校准
按照说明书来,用参数设定盒,配置为Fixed wing模式(适用于多旋翼模式),其他参数保持默认即可值。
SYS_USE_IO设为disabled,否则电调校准会失败

卸掉桨叶,然后配置电源(Power),4表示4s,3.7表示每芯额定电压是3.7V,4.2表示每芯满电电压是4.2V。

然后点击Calibrate,在弹出提示框的时候接入电池,然后会QGC会自动校准。校准成功的话,每次上电电机会发出哔哔哔哔-哔—的声音,前面有四个哔是因为用的电池是4S的。

检查PWM相关参数:
PWM_MAIN_MIN:1000PWM_MAIN_MAX:1950PWM_MAIN_DISARM:900
(遥控器油门PWM范围一般是1000多到1900多)
一般来说,Position模式,遥控器油门推过中点前,是不会起飞的,推过中点后才会。如果上面参数设置不合适的话,可能推过中点前就会起飞,并且会窜得很高。
4.3 PID参数
主要修改了姿态相关的参数
4.3.1 调参前
使用默认参数,arm后离地一米就会抖动然后震荡发散:

增大了angular rate D项后能飞,但是抖动明显,电机噪声大:

4.3.2 调参后
看网上说,震荡是因为P项太大了,于是把P减小,能飞了:

调参后参数:
Rate controller:
| 参数类型 | Roll | Pitch | Yaw |
|---|---|---|---|
| K | 0.7 | 0.7 | 1 |
| D | 0.006 | 0.006 | / |
| I | 0.1 | 0.1 | 0.1 |
Attitude controller:
| 参数类型 | Roll | Pitch | Yaw |
|---|---|---|---|
| P | 4.5 | 4.5 | 2.8 |