车载通信架构 —— 传统车内通信网络发展回顾
车载通信架构 —— 传统车内通信网络发展回顾
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。
老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师:
屏蔽力是信息过载时代一个人的特殊竞争力,任何消耗你的人和事,多看一眼都是你的不对。非必要不费力证明自己,无利益不试图说服别人,是精神上的节能减排。
无人问津也好,技不如人也罢,你都要试着安静下来,去做自己该做的事.而不是让内心的烦躁、焦虑、毁掉你本就不多的热情和定力。
文章大体有如下内容:
1、前言
2、传统总线概述
3、汇总
正文如下:
一、前言
车内通信网络是汽车的神经系统、 负责数据传输处理的核心部件,以往车载通信架构是重可靠性、轻传输速度。
车内通信网络指基于CAN、 LIN等传统通信技术建立的使得车内传感器、控制器与执行器(ECU)之间进行及时可靠的数据传输、处理和决策的通讯网络。 在汽车行业早期, 车内网络架构采用的都是点对点的通信模式。
但随着汽车智能化和自动化程度加深,功能愈加丰富, 单车ECU和导线数量大幅增加。传统的点对点架构下一辆车的导线长度可达数千米,节点可达上千个。 一方面线束的采购和装配成本大幅增加,另一方面也加剧了对车内有限空间的消耗。
二、传统总线概述
点对点通信到汽车总线,复杂度大幅降低,可靠性及可维护性大幅提升。 点对点的通信模式下,动力及车身控制中的各个功能单元都要与仪表盘进行一对一连接,各动力功能单元之间也需要相互连接,线束繁多,布线复杂。以 CAN 为代表的总线技术问世后,动力单元可连接到一条动力 CAN 上接到仪表盘,车身单元连接到车身CAN上接到仪表盘,线束的数量和结构大大简化。
传统点对点式的通信架构下汽车每增加一个新功能就需要对应增加一个ECU,增加电线和线束布线, 并嵌入相应的硬件和软件, 效率低且可操作性差。 而分布式架构如CAN总线可协助车辆实现最高减重45kg公斤并节约空间。 相比于点对点式的通信模式, 分布式架构优势在于:
-> 1、允许紧密联系的功能部署在一个 ECU 上从而更简单地集成到网络上;
-> 2、损坏替换很方便;
-> 3、应用层协议和数据定义统一,任何遵循协议的供应商所生产的控制单元都可轻易添加或拆除,几乎不需要硬件和软件的修改适配,灵活性强, 设计成本低。
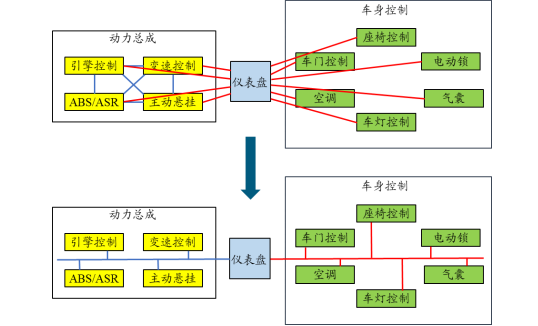
点对点通信到CAN总线通信
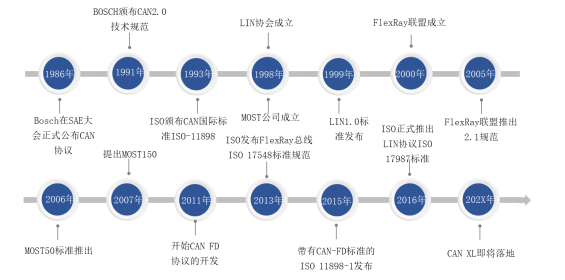
汽车总线技术发展历史早,迭代周期长,固化传统供应链及运作模式难以适应更快的开发需求。 早在1986年博世便提出CAN总线技术,至今其仍是应用最广的汽车总线技术,并且在进行更新迭代。2015年,传输速率5Mbps的CAN-FD国际ISO标准推出,2021年CiA( CAN in Automation)发布CiA 610-1规范(第三代),传输速度可达10Mbps的CAN XL面世,但尚未正式通过ISO标准。LIN总线、 FlexRay总线和MOST总线的最初标准分别于 1999 年、2005年、 2006年相继提出,相关公司或联盟的建立均在 2000 年之前。对于彼时的汽车而言,这些总线技术已基本能满足车内通信需求,因此一直沿用至今, 技术进步和迭代速度并不快,直到最近在智能网联汽车对车内通信需求大幅提升的冲击下,CAN 总线的迭代速度才有所加快。
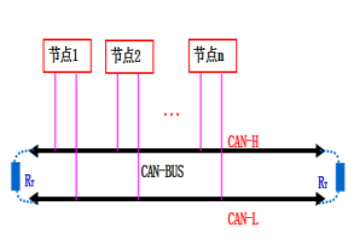
车载CAN总线
1、传输介质:双绞线
2、传输速率:
-> 高速 CAN: 1Mbps
-> 低速 CAN: 125Kbps
-> CAN FD: 5Mbps
-> CAN XL: 10Mbps
3、拓扑结构:线性拓扑,成本低、节点数110个
4、特点
A:实时性好。采用短帧结构,每一帧的有效字节数为8个;使用双绞线及差分电平信号,不易受干扰;
B:2、对节点信息设置不同优先级,保证了信息实时性,可达到汽车实时响应要求。
应用场景
不同系统之间的通信问题。汽车仪表、 ECU、控制模块、变速箱、辅助刹车系统。
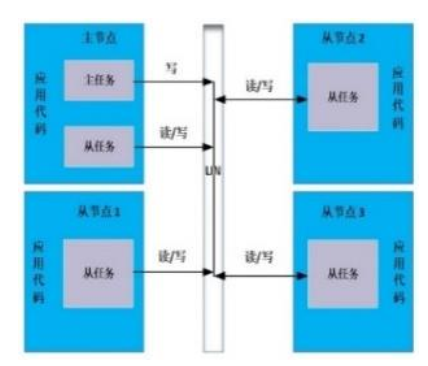
车载LIN
1、传输介质:单铜线
2、传输速率:19.6Kbps
3、拓扑结构:线性拓扑,成本最低、节点数16个
4、特点
A:通信过程中无需有仲裁和冲突管理机制的参与;
B:确定性强。
C:单线串行通信:线间干扰小,节省线束,传输距离长,成本低。
D:基于标准的UART/SCI 接口(使各个原始设备供应商都能提供互相兼容的电子器件)的低成本硬件、无石英或陶瓷振荡器的从节点,降低了硬件平台的成本。
应用场景
车窗、中控、后视镜、照明灯、座椅控制、天窗、空调系统等
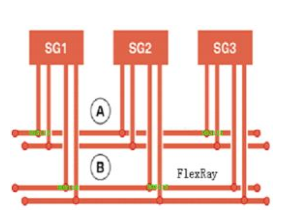
车载FlexRay
1、传输介质:双绞线
2、传输速率:10/20Mbps
3、拓扑结构:线型、星型、混合结构,成本较高、节点数22个
4、特点
A、冗余性好。采用冗余备份的办法,分别由2条总线和2个网络控制单元构成一个完整网络。每个 ECU分别和2条总线相连,当其中1个网络发生故障时,可以由另1个备份网络承担通信任务。
B:能够保证信息的确定性和实时性。采用时分多路访问技术(TDMA),各设备按照优先级占用不同的时隙实现对总线的复用,满足线控系统实时性方面的要求。
其局限性:更加复杂,对于OEM和供应商的能力要 求 更高,应用的成本更高。
应用场景
线控底盘和线控转向的通信电子动力转向系统( EPS)、电子稳定控制系统( ESC)、主动悬架系统( AS)和发动机管理系统( EMS)
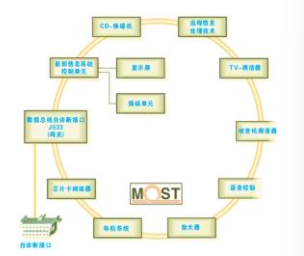
车载Most
1、传输介质:光纤
2、传输速率:MOST 20: 20Mbps、MOST 50: 50Mbps、MOST 150: 150Mbps
3、拓扑结构:环型结构,成本很高、节点数64个
4、特点
A、重量轻、占地面积小。使用聚甲基丙烯酸甲酯(有机玻璃)制成的塑料光纤为传输介质。与铜芯电缆母线相比,相同带宽减轻重量4.5kg。
B:抗电磁干扰能力强。使用光信号,防止交叉线干扰和电磁辐射稳定性可靠性。
应用场景:多媒体音视频传输
三、汇总
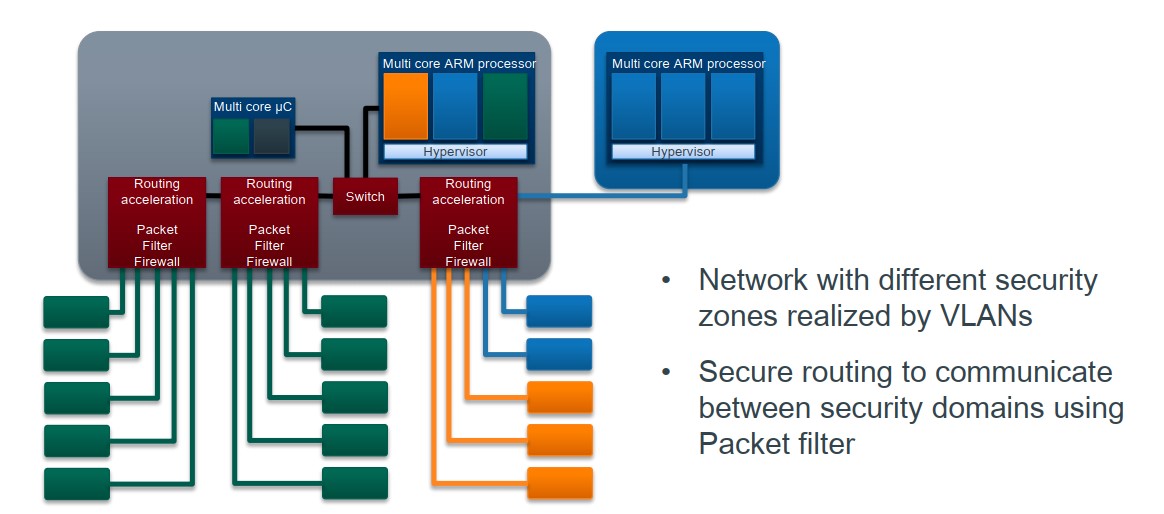
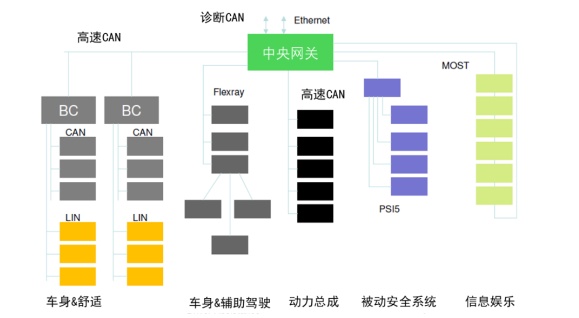
车内不同场景应用不同的总线技术以满足带宽与成本的平衡。 自总线技术出现以来,各大汽车厂商及零部件供应商曾开发过种类繁多的通信协议。 SAE依据传输速度和用途将汽车网络划分为四个等级,一个典型的车内网络会同时应用多种总线技术以针对功能、安全需求不同的场景,保证可靠性的同时做到成本控制。 以奥迪A6的车内网络架构为例,其发动机及动力相关功能接到动力CAN总线上、车门、座椅等功能连到舒适CAN总线上,音视频单元则使用MOST总线进行连接,各类型总线间通过总线数据诊断接口/网关进行连接。
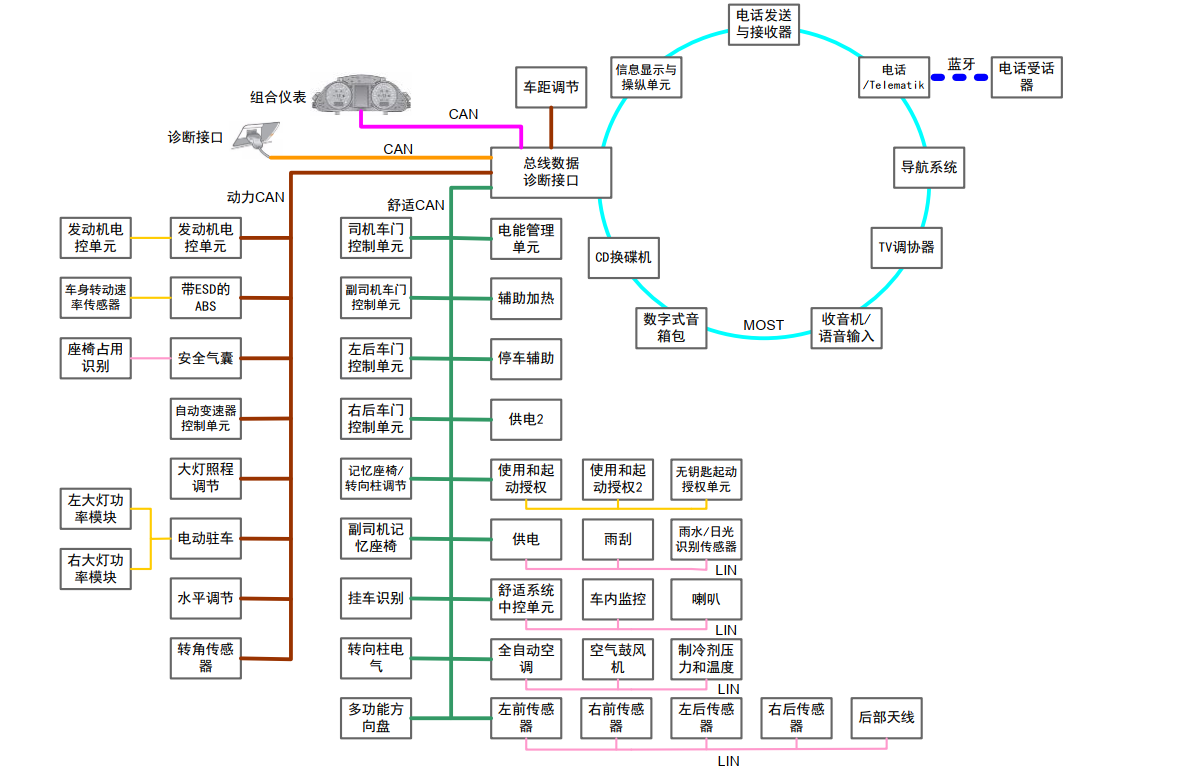
车身、动力等功能中CAN、LIN总线应用最广,数据传输需求大的音视频则采用MOST总线。 汽车中大部分车身控制及舒适功能(如车门、车窗、座椅、空调等)对于实时性、传输速率的要求不高,可采用低速CAN、LIN等传输速度不高但可靠性强、成本低廉的总线;动力、辅助驾驶相关的功能安全等级要求和可靠性、实时性要求更高,采用更高速率并具备高可靠性的高速 CAN、 FlexRay总线;而音视频娱乐功能对于传输速率的要求最高,采用专门用于音视频传输的高带宽MOST总线。此外各大总线通过中央网关进行数据交互传输。CAN总线、LIN 总线、 FlexRay总线和MOST总线是截至目前应用最广的传统总线技术。
搁笔分享完毕!
愿你我相信时间的力量
做一个长期主义者!
