3D点云目标检测:VoxelNex解读(带源码/未完)
VoxelNext
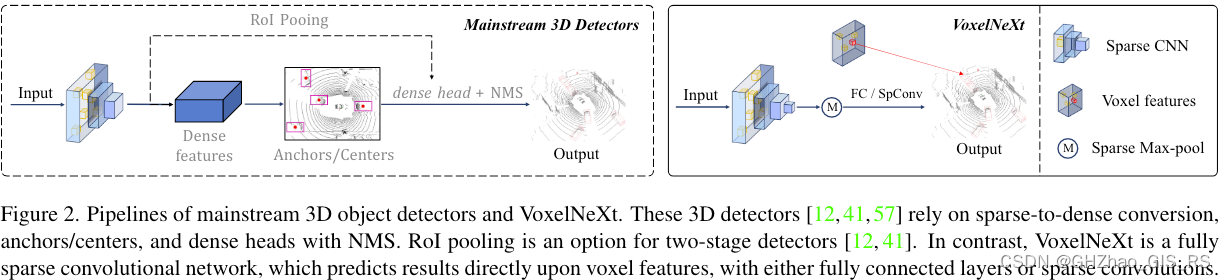
- 通用vsVoxelNext
- 一、3D稀疏卷积模块
- 1.1、额外的两次下采样
- 1.2、稀疏体素删减
- 二、高度压缩
- 三、稀疏池化
- 四、head
- 五、waymo数据集训练
- 六、训练自己的数据集bug修改
通用vsVoxelNext
一、3D稀疏卷积模块
1.1、额外的两次下采样
使用通用的3D sparse conv,区别是在stage4后再增加两次下采样,分别得到f5,f6,目的是增大感受野
1.1、消融实验结果
1.2、代码
1.2、稀疏体素删减
计算体素的重要性,根据比例删掉不重要的体素
用在前三次稀疏卷积中,消融实验结果,公式
二、高度压缩
f4、f5、f6体素压缩合并
三、稀疏池化
学习压缩后的体素重要性,训练过程中,靠近gt的voxel设置为正样本,使用focal loss训练。按照稀疏卷积的方式进行最大池化,保留最重要的体素。
四、head
全连接或者稀疏卷积
五、waymo数据集训练
六、训练自己的数据集bug修改
使用自己的数据集训练会报错,需要删掉iou branch才能正常运行,同样评测的config部分也要修改。