采用驱动IC和NMOS的防反电路设计
引言:无论是常规的低侧NMOS防反接电路还是高侧的PMOS防反接电路均有其局限性。本节简述采用驱动IC加NMOS的方案做防反电路的设计及其优点。
1、高边NMOS防反
PMOS的高边防反接使用自驱效应,但其存在待机电流偏大和电流反灌隐患,并且PMOS价格偏高,几乎没有使用驱动IC+PMOS高边防反这种设计,所以为了均衡价格因素和Rdson,消除待机电流偏大和电流反灌隐患(若单纯使用高边NMOS,也会有待机电流和电流反灌问题),使用驱动IC+NMOS这种高边防反接设计。但这里并不是否定低边NMOS防反和高边PMOS防反,实际上低边NMOS防反和高边PMOS防反使用的更多,驱动IC+NMOS这种方式一方面是为了应对测试机构的测试用例,一方面是应对可预见的实际问题。通常使用高边PMOS防反接并没有什么问题。
使用高边NMOS防反接,通常没有足够高的电压来驱动栅极,此时可以使用驱动IC来从高边取电,输出比S极更高的电压来驱动NMOS导通,驱动IC有两种:电荷泵型和Buck-Boost型,见图1。带驱动IC这种形式,虽然这增加了电路的复杂性,但N沟道MOSFET的导通电阻较低。
在大部分时间都处于正常连接供电场景中,由于电荷泵型和Buck-Boost型将额外消耗电流(需要不断地工作产生驱动电压维持NMOS的开启),单纯的高边PMOS防反接效率反而更好。
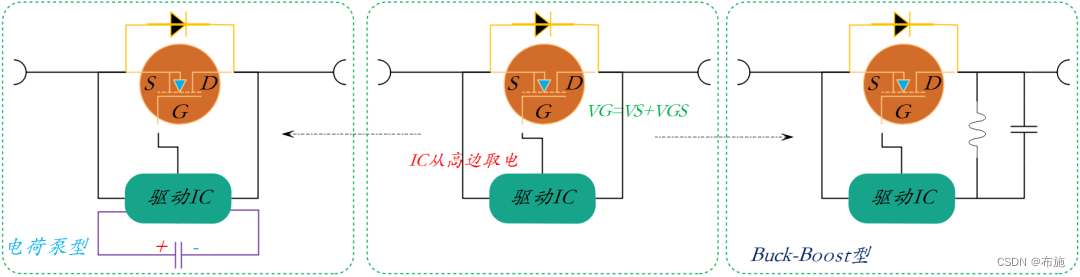
图1:高边NMOS防反驱动--->NMOS+驱动IC
2、电荷泵驱动NMOS
如图2所示,这是一个采用电荷泵做NMOS驱动的简图:
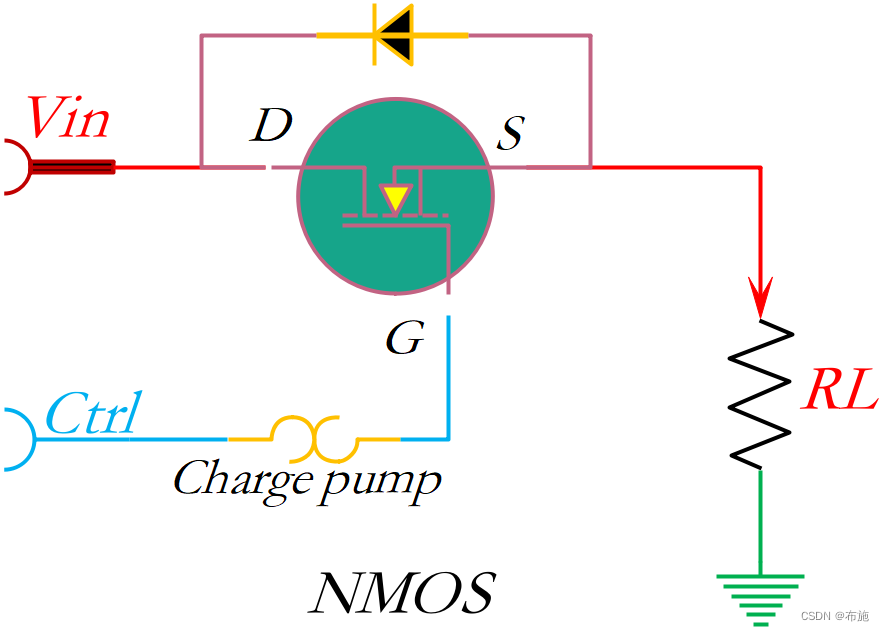
图2:电荷泵驱动NMOS高边开关
Ctrl控制电荷泵工作产生高压驱动NMOS导通工作。
如图3是电荷泵驱动内部图,Ci是小电容,充放电速度快,Co是大电容,负载能力强。通过频繁的开关,S1、S2和S3、S4就能不断地将Ci上的电荷搬运到Co上,而Co是相对于输入电压,因此我们就能够得到比输入电压更高的驱动电压。当需要驱动NMOS导通时,使能开关S0。当不需要驱动NMOS导通时,失能S0。
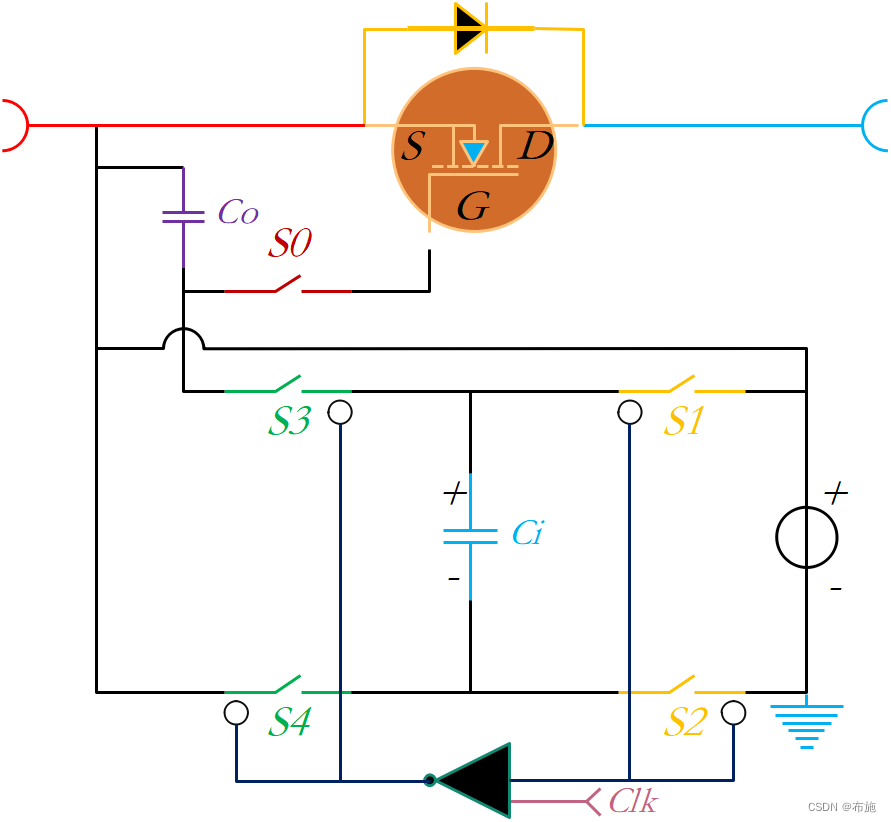
图3:电荷泵驱动NMOS高边开关简图
采用电荷泵型的驱动方案,整体物料少,成本较低,适用于电流不大的场景。
3、Buck-Boost型驱动NMOS
如图4所示,是一个基于Buck-Boost拓扑的NMOS驱动拓扑。当Buck-Boost的S1导通时,输入电压通过电感储能,电感电压上正下负。当Buck-Boost的S1关断时,电感产生反向电动势,下正上负,通二极管给电容C1充电,这样C1的电压就会高于输入电压,也即VGS大于开启阈值。

图4:电感通过二极管释放能量,电感电压上负下正给电容充电
采用Buck-Boost型的防反方案,IC的驱动能力强,EMC性能好,适用于大电流,追求高性能的场合,比如汽车各类域控制器、汽车音响系统,汽车USB PD充电器。
4、两种驱动方式的比较
当需要驱动NMOS导通时,使能S0就能驱动NMOS可靠导通。Buck-Boost型有更大的驱动电流能力。Buck-Boost型防反驱动能更快地响应输入电压的各种波动,其中最典型的当属输入叠加高频交流纹波。当输入叠加交流纹波时,Buck-Boost型防反驱动能快速响应(带反馈),图5是输入叠加100KHZ峰值两幅条件下的实测波形:

图5:Buck-Boost型防反驱动响应波形
紫色是输入防反NMOS的输入电压,浅蓝色防反NMOS的D级输出电压,虽然输入电压波动很大,但是经过NMOS后反而变得平顺了。红色是MOSFET驱动VGS电压,绿色是负载电流。可以看到,当输入电压处于波动过程中,当 VS 低于VD时,关闭NMOS驱动,防止电容电流反灌。当VS高于VD时,开启NMOS驱动,及时驱动主沟道导通,避免只有体二极管导通。

图6:电荷泵型防反驱动响应波形
电荷泵型防反驱动由于驱动电流能力不强,所以需要更频繁的搬移电荷。当输入叠加高频交流纹波时,有可能会出现如图11-7所示G极驱动脉冲丢失或者G极驱动脉冲常开的现象。图11-6是实测采用电荷泵型防反驱动的波形。黄色是防反NMOS输入电压,红色是NMOS的输出D极电压,绿色是NMOSFET的驱动VGS电压,蓝色是负载电流。在门级驱动脉冲丢失的时间内, NMOS无驱动,体二极管导通存在巨大热损耗,同时在下一次开通瞬间存在较大的充电电流尖峰。在门级驱动脉冲常开的时间内,相当于NMOS常通,电解电容反复充放电,导致发热严重。
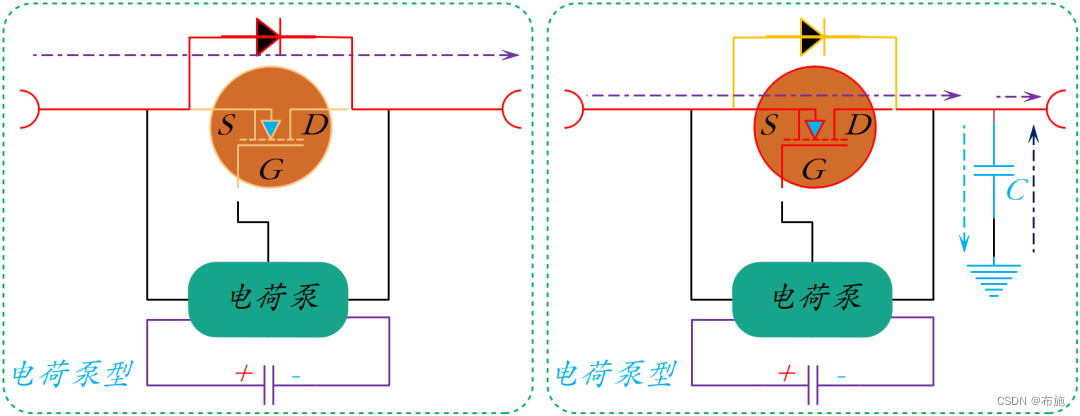
图7:电荷泵型防反驱动动态影响
其次是EMC问题,采用电荷泵型的防反驱动,虽然没有电感,但它属于电容式开关电源,其效率低,工作频率高。因为芯片内部集成的电容一般容值不大,是pF级别,芯片外围给MOS做驱动的电容一般容值较大,是uF级别。如需要在1ms内将NMOS的驱动电压升起来,则必然需要反复将pF级别的电容电荷搬运到uF级别的电容上,其开关频率不可避免在10MHZ以上,这就有可能带来潜在的EMC风险,如图8所示:

图8:电荷泵型驱动带来的EMC隐患实测
采用Buck-Boost的防反驱动,其效率远高于电荷泵性。芯片内部一般采用定峰值电流模式,这种模式负载越轻,开关频率越低。而MOSFET是电压型器件,其电流消耗很小,因此开关频率极低,几乎没有EMC的问题。

图9:ISO7637-Pulse1测试波形
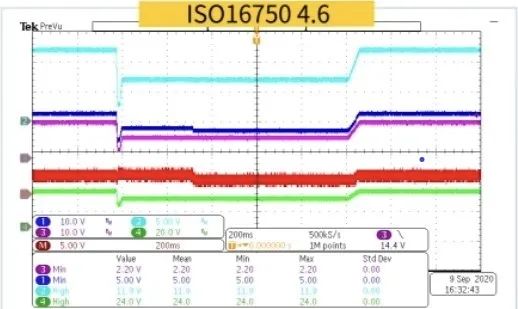
图10:ISO16750-4.6测试波形
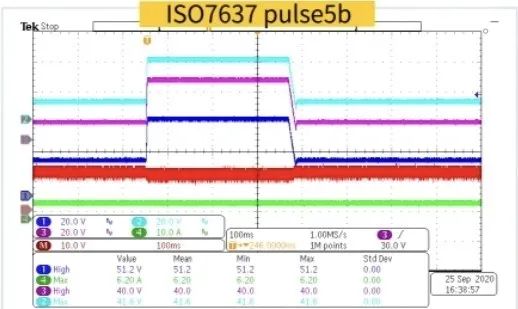
图11:ISO7637-Pulse5b测试波形
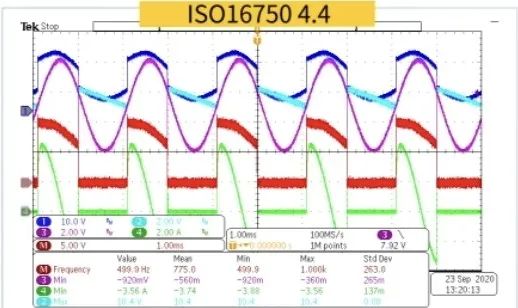
图12:ISO16750-4.4测试波形
如图9至图12所示的测试机构电源测试波形,采用Buck-Boost型的驱动IC,其EMC测试结果能完美通过国标等级5的测试,配合合适的外围参数设计,能够轻松应对各种电源线抗老实验,是汽车电子产品可靠的前端防反设计。