HXDSP2441-I2C(Inter-Integrated Circuit)
I2C(Inter-Integrated Circuit)
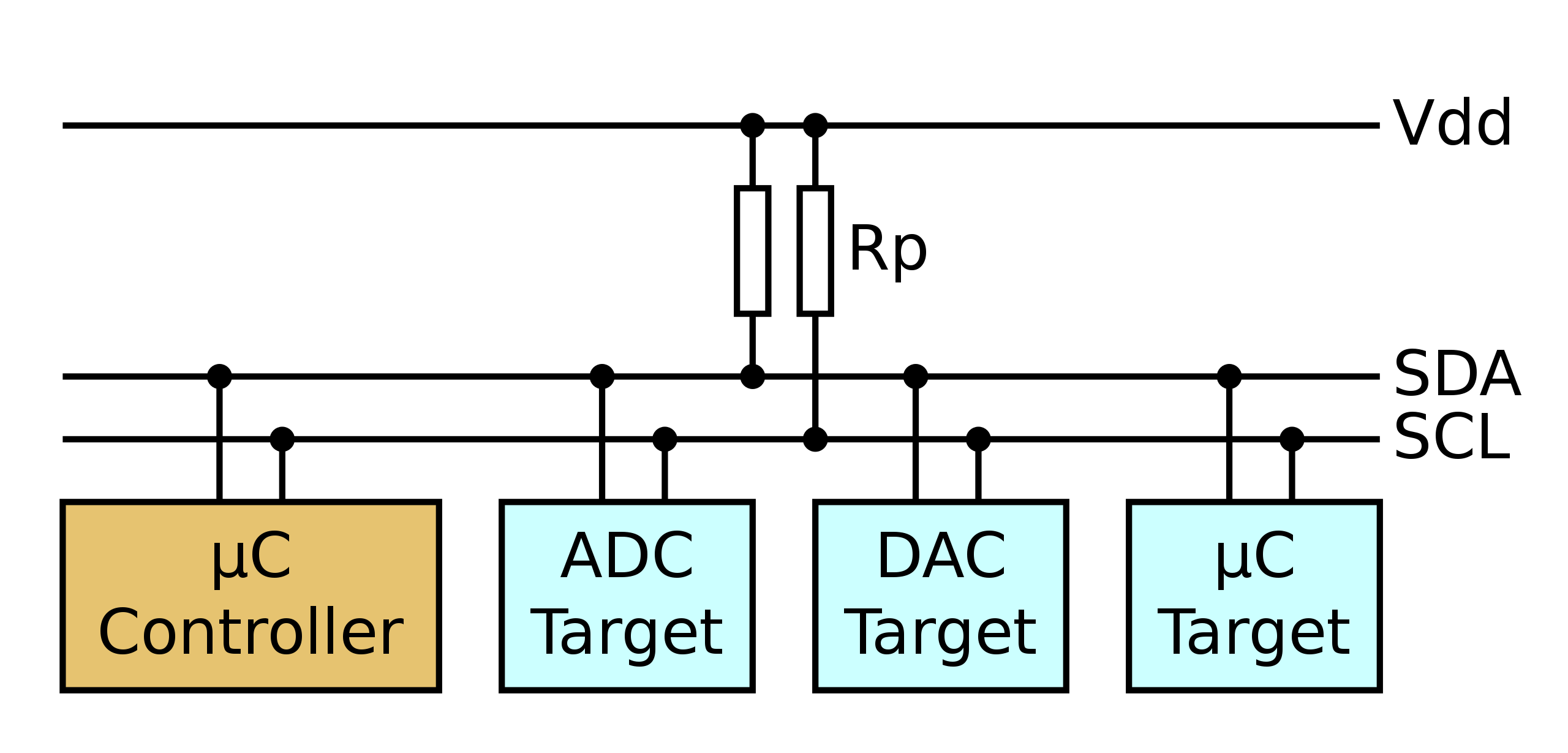
I2C(Inter-Integrated Circuit),也称为 I2C 或 IIC,是一种同步、多主/多从(控制器/目标)、单端、串行通信总线。 1982 年由飞利浦半导体公司开发。 它广泛用于在短距离板内通信中将低速外围 IC 连接到处理器和微控制器。
自 20 世纪 90 年代中期以来,西门子、NEC、德州仪器、意法半导体、摩托罗拉、Nordic Semiconductor 和 Intersil 等多家竞争对手已向市场推出了兼容的 I2C 产品。
I2C 总线广泛应用于各种电子应用中,在这些应用中,简单性和低制造成本比速度更重要。 涉及 I2C 的 PC 组件和系统包括双列直插内存模块 (DIMM) 上的串行存在检测 (SPD) EEPROM、通过 VGA、DVI 和 HDMI 连接器用于显示器的扩展显示识别数据 (EDID)、访问 NVRAM 芯片等。 微控制器上最知名的 I2C 应用包括读取硬件监视器、传感器、实时时钟、控制执行器、访问低速 DAC 和 ADC、控制小型(例如功能手机)LCD 或 OLED 显示屏、更改背光、对比度、色调、色彩平衡 显示器中的设置等(通过显示数据通道),更改智能扬声器的音量,…
I2C 的一个特殊优势是微控制器能够仅通过两个通用 I/O 引脚和软件来控制设备芯片网络。 类似应用中使用的许多其他总线技术,例如串行外设接口总线(SPI),需要更多的引脚和信号来连接多个设备。
系统管理总线(SMBus)由 Intel 于 1995 年定义,是 I2C 的子集,定义了更严格的用法。 SMBus 的目的之一是提高稳健性和互操作性。 因此,现代 I2C 系统结合了 SMBus 的一些策略和规则,有时支持 I2C 和 SMBus,仅需要通过命令或输出引脚使用进行最少的重新配置。 PC 系统的系统管理使用 SMBus,其引脚分配在传统 PCI 和 PCI Express 连接器中。
HXDSP2441 IIC
HXDSP2441在BSP中提供通过I2C协议与EEPROM进行通信的接口,Demo板通过M24M01器件对I2C接口进行测试,测试代码如下。
#define CONFIGURE_INIT
#include <drivers/xconfig_baseparm.h>
#include "sys_cfg.h"
#define I2C_DEV_NO 0
#define I2C_BUS_NO 0
#define DATA_SIZE 256
int main(int argc, char* argv[]) {
i2c_status_code ret = 0;
int slave_addr = 0x50;
epos_libio_init_args_t init_args = {
.data0 = (I2C_BUS_NO) | (slave_addr << 16)};
ret = m24m01_driver_initialize(I2C_DEV_NO, &init_args);
if (ret != I2C_SUCCESSFUL) {
printf("m24m01_driver_initialize fail.\n");
return -1;
}
epos_libio_rw_args_t rw_args;
char send_buf[DATA_SIZE];
for (int i = 0; i < DATA_SIZE; i++)
send_buf[i] = 0x5a + i;
rw_args.data0 = 0; // 总线号
rw_args.buffer = send_buf; // 发送缓冲区的首地址
rw_args.count = DATA_SIZE; // 发送数量
rw_args.offset = 0;
ret = m24m01_driver_write(0, &rw_args);
if (ret != I2C_SUCCESSFUL) {
printf("i2cmaster_driver_write fail.\n");
return -1;
}
char recv_buf[DATA_SIZE];
memset(recv_buf, 0, sizeof(recv_buf));
rw_args.data0 = 0; // 总线0
rw_args.count = DATA_SIZE; // 读取数量
rw_args.buffer = recv_buf; // 读取至内存的首地址
ret = m24m01_driver_read(0, &rw_args);
if (ret != I2C_SUCCESSFUL){
printf("i2cmaster_driver_read fail.\n");
return -1;
}
int check_ok = 1;
for(int i=0;i<DATA_SIZE;i++){
if(recv_buf[i] != send_buf[i]){
printf("M24M01 byte%d check fail, expect 0x%x but get 0x%x\n", i, send_buf[i], recv_buf[i]);
check_ok = 0;
// break;
}
}
if(check_ok){
printf("M24M01 check pass.\n");
}
return 0;
}