PID控制---基于python模拟
PID是控制中非常经典的一个模型,利用P(比例)、I(微分)、D(积分)三者相互合作来实现对一个信号的闭环控制,同时可以让信号波形平滑变化而不是突变。以下主要是结合一个python实现的控制速度的程序来模拟PID的过程。
参考博客:电机控制进阶——PID速度控制_pid速度控制算法_码农爱学习的博客-CSDN博客
目录
简述
P(比例)
I(微分)
D(积分)
基于Python的速度调整
Kp=0.01,Ki=0,Kd=0
Kp=0.01,Ki=0.01,Kd=0
Kp=0.01,Ki=0.01,Kd=0.01
简述
PID控制分为增量式和位置式两种控制方式,因为位置式用的比较多,因此我就以位置式的为主展开(增量式我参考的博客中有,如果有兴趣可以自行了解)。
位置式PID控制主要由P(比例)、I(微分)、D(积分)三个部分组成,下面是一个简单的结构框图。
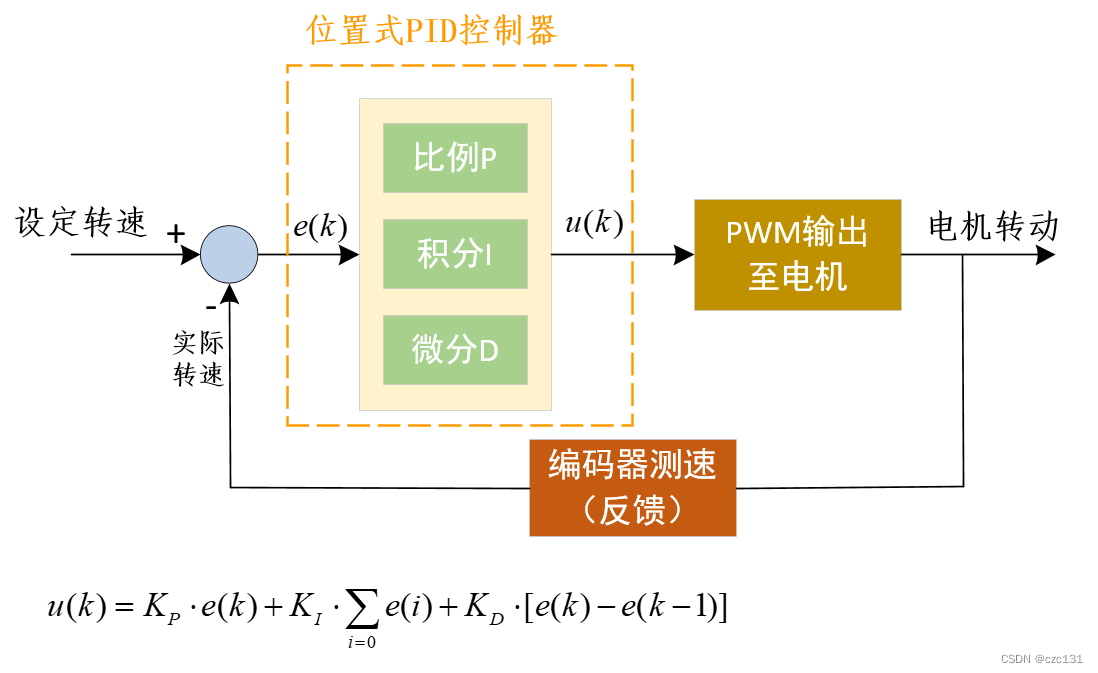
假设当前设定的是速度,可以看到利用目标速度-实际速度,可以得到一个误差,根据这个误差经过P、I、D三种量的运算求和得到当前需要的修正量对实际值修正,然后使得最终实际值不断接近目标值。
下面是对PID单独的解释:
P(比例)
P大致反映的改变量大小,与当前值和目标值的差距大小有关,差距越大,那么这个量也越大。 就拿推箱子举例,离目的地越远,那么你用的力也就越大,这样才能更快达到目的地,相反,要是距离目的地很近了,这时候就需要少点用力,不然就就会偏离目标更远。
I(微分)
I大致反映的是阻力的大小,在连续情况中反映为导数,而在一般工程学的离散情况中就是两次测量误差的差值,也就是此次误差和上一次误差的差分。
这其实就是相当于阻力的作用, 无论你怎么调整,我都反向变化,这在最后平衡附近震荡时是很有效的,能够显著降低震荡幅度。
D(积分)
D大致是针对不同阶段的调整做法,与调整的误差和有关。
这个量主要是解决静态平衡的问题,假如有一个池子,有一个预期水位,有放水有漏水,一次调整周期内,放水为u,漏水为u,那么调整后水位依旧如此,下一个状态和上一个状态完全一致,那么P和I也是和上一个状态完全一致,那么调整后还是这个状态,就陷入了死循环,此时就需要D这个量,由于这个量是和误差和直接相关,那么每次调整,误差都会增加,那么下次调整的量就会和这次的不一样,就可以打破这个死循环。
基于Python的速度调整
下面主要是针对PID模型建立速度调整的模型,就以将速度从60调整至100为例,最终的精度要求是0.001,可以感受一下各个量的作用。
为了稳定的效果,我将几个系数都设置的比较小,大了很有可能就最终直接NaN了,可以自行调参设置。
代码如下:
from matplotlib import pyplot as plt
def PID(now_v,expc_v):
Kp = 0.01
Ki = 0
Kd = 0
sum_err = 0
v_list = []
err = expc_v - now_v
err_last = err # 上一次的输出,先初始化为一致
cnt = 0
while abs(err) > 0.001: # 误差还在范围外
err = expc_v - now_v
sum_err += err
uk = Kp*err + Ki * sum_err + Kd * (err-err_last) # 确定本次输出
# now_v = now_v + uk + random.uniform(0,0) # 更新当前速度,加入一个扰动
now_v = now_v + uk
err_last = err
v_list.append(now_v)
cnt += 1
print(cnt)
plt.plot(v_list)
plt.show()
if __name__ == '__main__':
PID(60,100)Kp=0.01,Ki=0,Kd=0
此时表示的是仅利用P来控制,运行后发现下面的调整过程
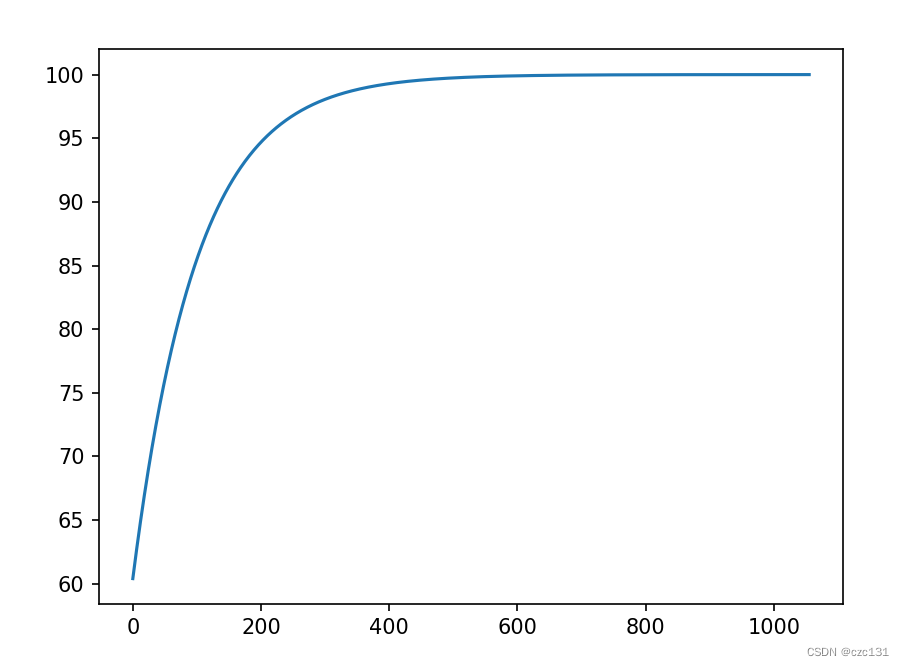
看上去非常理想,因为这种情况本身就比较理想, 如果我加入了一个扰动项,那么就会变成下面这样,将速度加入随机扰动项。
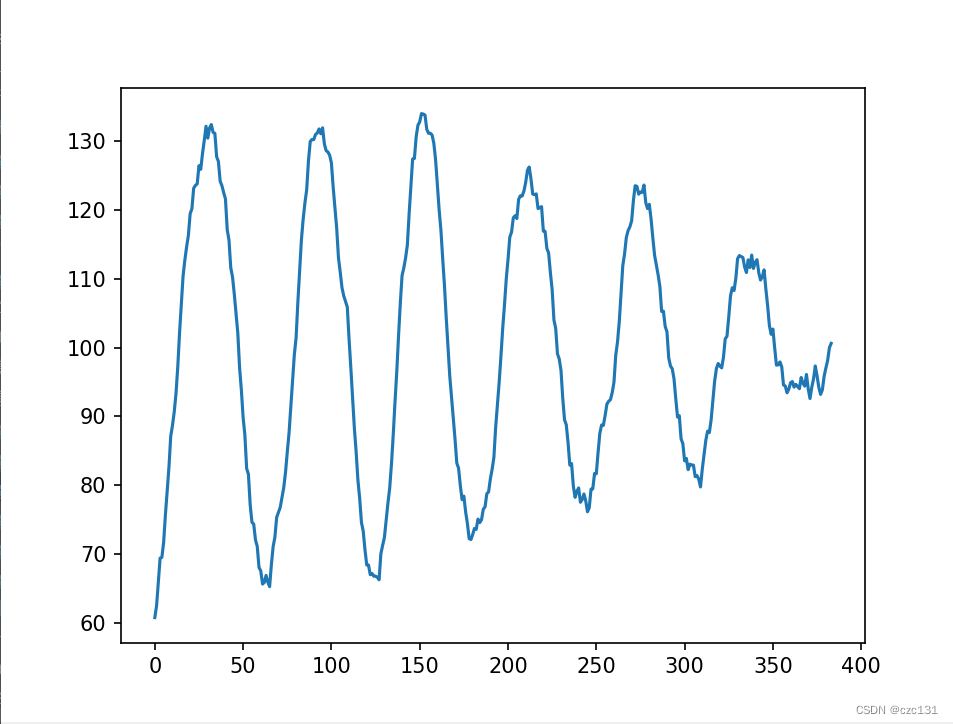
now_v = now_v + uk + random.uniform(-0.1,0.1) # 更新当前速度,加入一个扰动经过测试,比较小的扰动还是可以很快收敛,但是如果扰动比较大,比如为(-2,2),那么就会像下面这样

到了五千轮左右才收敛,随着误差的增大,这个此时会变得更多,因此仅仅靠P来控制仅适用于理想情况。
Kp=0.01,Ki=0.01,Kd=0
此时加入了I这个量,这个量在前面说主要是为了消除震荡,可以很好消除外部的一些影响,同样设置(-2,2)的随机扰动,如下:

发现在2500轮左右就实现了精度的要求,不过从实验来看,效果并不是很明显,可能是因为参数还没有调好。
Kp=0.01,Ki=0.01,Kd=0.01
这种情况下就是加入了累积误差项的调整,就是完整的PID过程。
还是在(-2,2)的随机误差情况下,这种组合的相对调整次数确实会少一点。
以上就是关于PID的一些个人理解,就是简单调试,没有真正调参,就当是做个记录了。