【51单片机系列】74HC595实现对LED点阵的控制
本文是关于LED点阵的使用,使用74HC595模块实现对LED点阵的控制。
文章目录
- 一、8x8LED点阵的原理
- 1.1 LED点阵显示原理
- 1.2 LED点阵内部结构图
- 1.3 开发板上的LED点阵原理图
- 1.4 74HC595芯片
- 二、使用74HC595模块实现流水灯效果
- 三、 使用74HC595模块控制LED点阵对角线亮
一、8x8LED点阵的原理
1.1 LED点阵显示原理
LED点阵是由发光二极管排列组成的显示器件,被广泛应用于汽车报站器、广告屏等。如下所示:
proteus中的8x8点阵如下:

通常应用较多的是8x8点阵,使用多个8x8点阵可组成不同分辨率的LED点阵显示屏,比如16x16点阵可以使用4个8x8点阵构成。
1.2 LED点阵内部结构图
8x8LED点阵内部结构图如下,这两种图片只是接法不同,要点亮LED,左图需要行置为高电平,列置为低电平;右图则需要行置为低电平,列置为高电平。
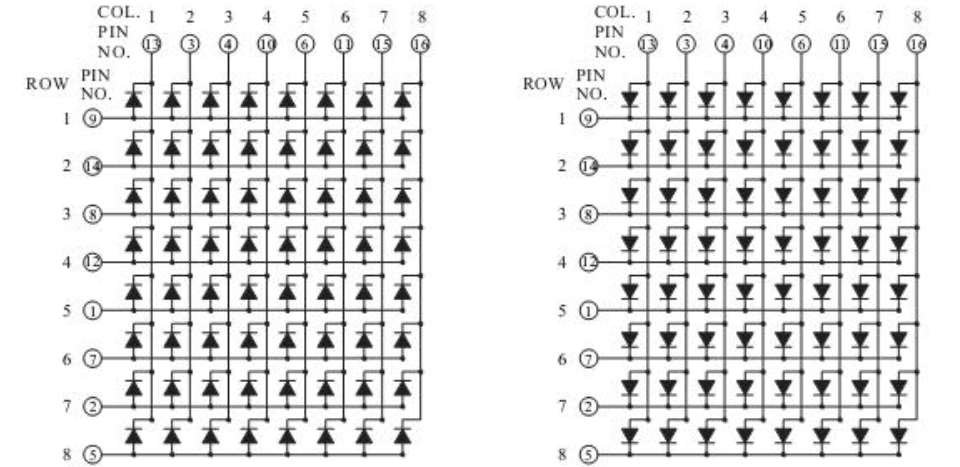
8x8点阵共由64个发光二极管组成,且每个发光二极管是放置在行线和列线的交叉点上,当对应的某一行置高电平,某一列置低电平,则相应的二极管将点亮。
比如对于左图,如果要将第一个点点亮,则将第一行的⑨脚接高电平,第一列的13脚接低电平,第一个点就会点亮;如果要将第一行点亮,则第一行的⑨脚接高电平,所有列(13、3、4、10、6、11、15、16脚)接低电平,第一行就会点亮;如果要将第一列点亮,则第一列的13脚接低电平,所有行(9、14、8、12、1、7、2、5脚)接高电平,第一列就会点亮;如果要将对角线点亮,可以动态显示,首先点亮第一个点,然后点亮第2行第2列的点…这样依次循环点亮,就可以显示对角线的点。
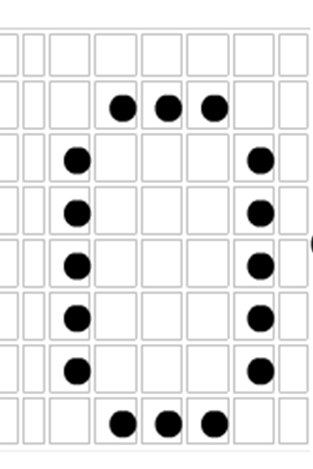
如果要显示数字或字符,在需要的位置点亮,比如显示0(如下),可以循环点亮如下位置的LED。
1.3 开发板上的LED点阵原理图
开发板上使用了74HC595芯片实现串转并,接到LED点阵模块,原理图如下:
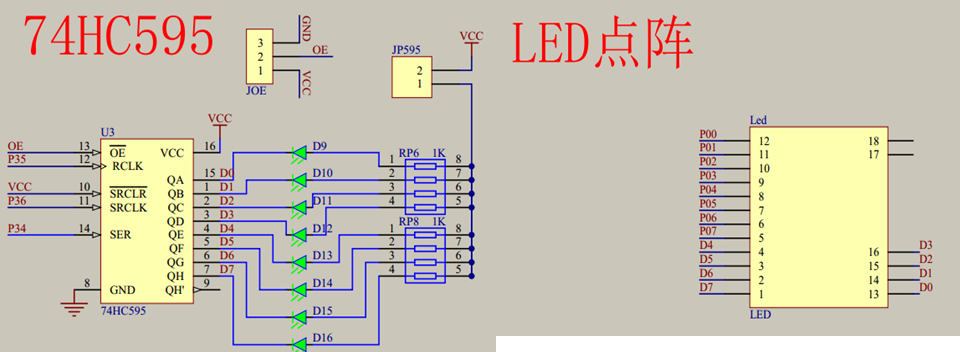
74HC595起到了扩展IO口的功能,从原理图可以看到74HC595使用3个IO口输入,有8个IO口输出。这8个IO口控制LED点阵的行(从第一行到最后一行分别是D7-D0),使用P0口控制LED点阵的列(从第一列到最后一列分别是P07-P00)。
比如对于如上结构图左图所示,如果要点亮第一个LED,那么P0口应该置为0x7f,D7-D0应该置为0x80。
1.4 74HC595芯片
74HC595芯片具有8为串行输入/输出或者并行输出移位寄存器,具有三态输出(高电平、低电平、高阻态)。是总线驱动的并行输出。通常用于串行输入到并行输出的数据转换。
74HC595引脚说明如下:
| 符号 | 引脚 | 描述 |
|---|---|---|
| Q0…Q7(QA…QH) | 15,1-7 | 并行数据输出 |
| GND | 8 | 逻辑地 |
| Q7’ | 9 | 串行数据输出 |
| /MR(/SRCLR) | 10 | 主复位(低电平有效),接到GND就处于复位状态,要接到电源处于高电平状态 |
| SHCP(SRCLK) | 11 | 移位寄存器时钟输入 |
| STCP(RCLK) | 12 | 存储寄存器时钟输入 |
| /OE | 13 | 输出有效(低电平有效),在开发板上有一个端子,如果要使输出有效,就短接到GND,如果要使输出无效,就短接到VCC。也可以连接到一个IO口进行控制。进行LED点阵实验时要短接到地,使输出有效。 |
| DS(SER) | 14 | 串行数据输入,输入的数据经过74HC595芯片转换为并口输出 |
| VCC | 16 | 电源 |
74HC595功能如下,H=高电平,L=低电平,↑=上升沿,↓=下降沿,Z=高阻态,NC=无变化,X=无效
| 输入 | 输入 | 输入 | 输入 | 输入 | 输出 | 输出 | 功能 |
|---|---|---|---|---|---|---|---|
| SHCP | STCP | OE | MR | DS | Q7’ | Qn | |
| X | X | L | ↓ | X | L | NC | MR为低电平时仅影响移位寄存器 |
| X | ↑ | L | L | X | L | L | 移位寄存器到输出寄存器,STCP上升沿会将数据输出 |
| X | X | H | L | X | L | Z | 清空移位寄存器,并行输出为高阻态 |
| ↑ | X | L | H | H | Q6’ | NC | 逻辑高电平移入移位寄存器状态0,包含所有的移位寄存器状态移入 |
| X | ↑ | L | H | X | NC | Qn | 移位寄存器的内容到达存储寄存器并从并口输出 |
| ↑ | ↑ | L | H | X | Q6’ | Qn’ | 移位寄存器内容移入,先前的移位寄存器的内容到达存储寄存器并输出 |
从上表可以知道,当主复位MR为高电平,输出使能OE为低电平时,数据在SHCP上升沿进入移位寄存器,在STCP上升沿输出到并行端口。
74HC595的数据端:
Q0-Q7:八位并行输出端,可以直接控制数码管的8个段。
Q7’:级联输出端,可以接下一个595的SER端。
SER:串行数据输入端。
74HC595控制端说明
- /SCLR(10脚):主复位脚,低电平时清空移位寄存器,通常接VCC。
- SCK(11脚):上升沿数据寄存器移位,下降沿移位寄存器数据保持不变。
- RCK(12脚):上升沿时移位寄存器的数据进入存储寄存器,下降沿存储寄存器数据不变。
- /OE(13脚):输出使能,高电平时禁止输出。
二、使用74HC595模块实现流水灯效果
在proteus中硬件设计如下,实现的功能为使用74HC595芯片实现流水灯效果。
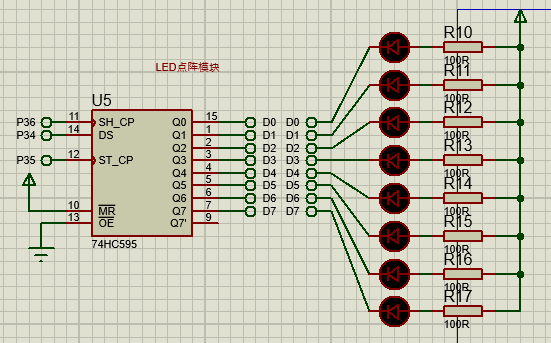
根据上面对74HC595的介绍,DS引脚是输入的串行数据,SHCP上升沿会进行移位寄存器的移位操作,STCP上升沿时会将数据输出到并行端口。
软件代码如下:
/*
实现功能:74HC595芯片控制LED点阵实现LED流水灯的效果
[2023-12-08] zoya
*/
#include "reg52.h"
#include "intrins.h"
typedef unsigned char u8;
typedef unsigned int u16;
sbit DS = P3^4; // 74HC595输入数据端口
sbit STCP = P3^5; // 74HC595存储寄存器端口,上升沿时移位寄存器进入存储寄存器
sbit SHCP = P3^6; // 74hc595移位寄存器端口,上升沿时移入数据
// 延时函数,i=1延时10us
void Delay(u16 i)
{
while(i--);
}
// 74HC595芯片将输入的串行数据转换为并行数据输出
void HC595SendByte(u8 dat)
{
u8 i;
STCP = 1; // 高电平时存储寄存器数据保持不变
SHCP = 1; // 高电平时移位寄存器数据保持不变
for(i=0;i<8;i++)
{
DS = dat >> 7; // 每次输入最高位数据
dat <<= 1; // 移位后将dat数据左移一位,保证下一次移入的数据在最高位
// 实现移位寄存器的时序,需要SHCP有一个上升沿,所以先将SHCP置0,然后置1
SHCP = 0;
_nop_(); // 空指令,不做任何操作,当做延时使用
_nop_();
SHCP = 1;
}
// 数据已经在移位寄存器了,现在将移位寄存器的数据输出到存储寄存器
// STCP上升沿时将数据从移位寄存器输出到存储寄存器
STCP = 0;
_nop_();
_nop_();
STCP = 1;
}
void main()
{
u8 ledNum = ~0x01; // 首先点亮D0
// HC595SendByte(0xff);
while(1)
{
HC595SendByte(ledNum);
ledNum = _crol_(ledNum,1); // 左移,逐个点亮D0-D7
Delay(50000);
}
}
仿真结果:
三、 使用74HC595模块控制LED点阵对角线亮
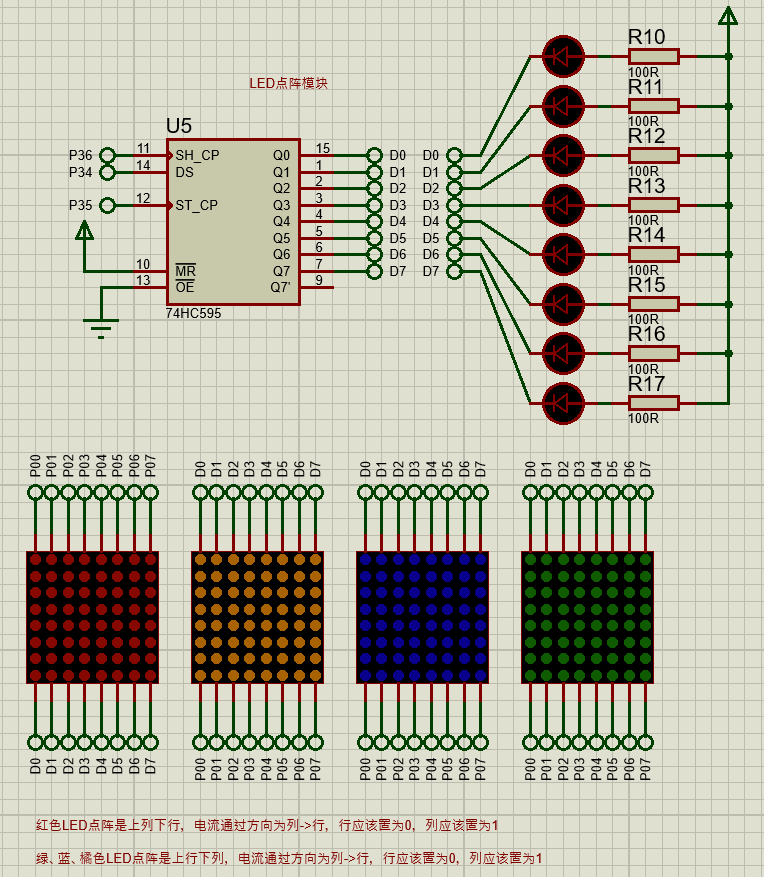
在proteus中设计如下LED点阵,实现使用74HC595控制LED点阵对角线灯亮的功能。
代码实现如下:
/*
实现功能:74HC595芯片控制LED点阵实现对角线点亮
[2023-12-08] zoya
*/
#include "reg52.h"
#include "intrins.h"
#define GPIO_LED P0 // LED点阵列控制IO口
typedef unsigned char u8;
typedef unsigned int u16;
sbit DS = P3^4; // 74HC595输入数据端口
sbit STCP = P3^5; // 74HC595存储寄存器端口,上升沿时移位寄存器进入存储寄存器
sbit SHCP = P3^6; // 74hc595移位寄存器端口,上升沿时移入数据
u8 ledNum = 0x01;
// 延时函数,i=1时延时10us
void Delay(u16 i)
{
while(i--);
}
// 74HC595芯片将输入的串行数据转换为并行数据输出
void HC595SendByte(u8 dat)
{
u8 i;
STCP = 1; // 高电平时存储寄存器数据保持不变
SHCP = 1; // 高电平时移位寄存器数据保持不变
for(i=0;i<8;i++)
{
DS = dat >> 7; // 每次输入最高位数据
dat <<= 1; // 移位后将dat数据左移一位,保证下一次移入的数据在最高位
// 实现移位寄存器的时序,需要SHCP有一个上升沿,所以先将SHCP置0,然后置1
SHCP = 0;
_nop_(); // 空指令,不做任何操作,当做延时使用
_nop_();
SHCP = 1;
}
// 数据已经在移位寄存器了,现在将移位寄存器的数据输出到存储寄存器
// STCP上升沿时将数据从移位寄存器输出到存储寄存器
STCP = 0;
_nop_();
_nop_();
STCP = 1;
}
void main()
{
// 点亮LED点阵的第一个灯,P00=0,其它为1
u8 dNum = ~0x01;
GPIO_LED = ledNum;
while(1)
{
HC595SendByte(dNum);
GPIO_LED = ledNum;
Delay(200);
dNum = _crol_(dNum,1);
ledNum = _crol_(ledNum,1);
}
}
仿真结果: