对传递函数的零极点、频率响应、稳定性的理解
对传递函数的零极点、频率响应、稳定性的理解
零极点
从传递函数求零极点
令传递函数分子为0求出零点,令分母为0求出零点。
频率响应
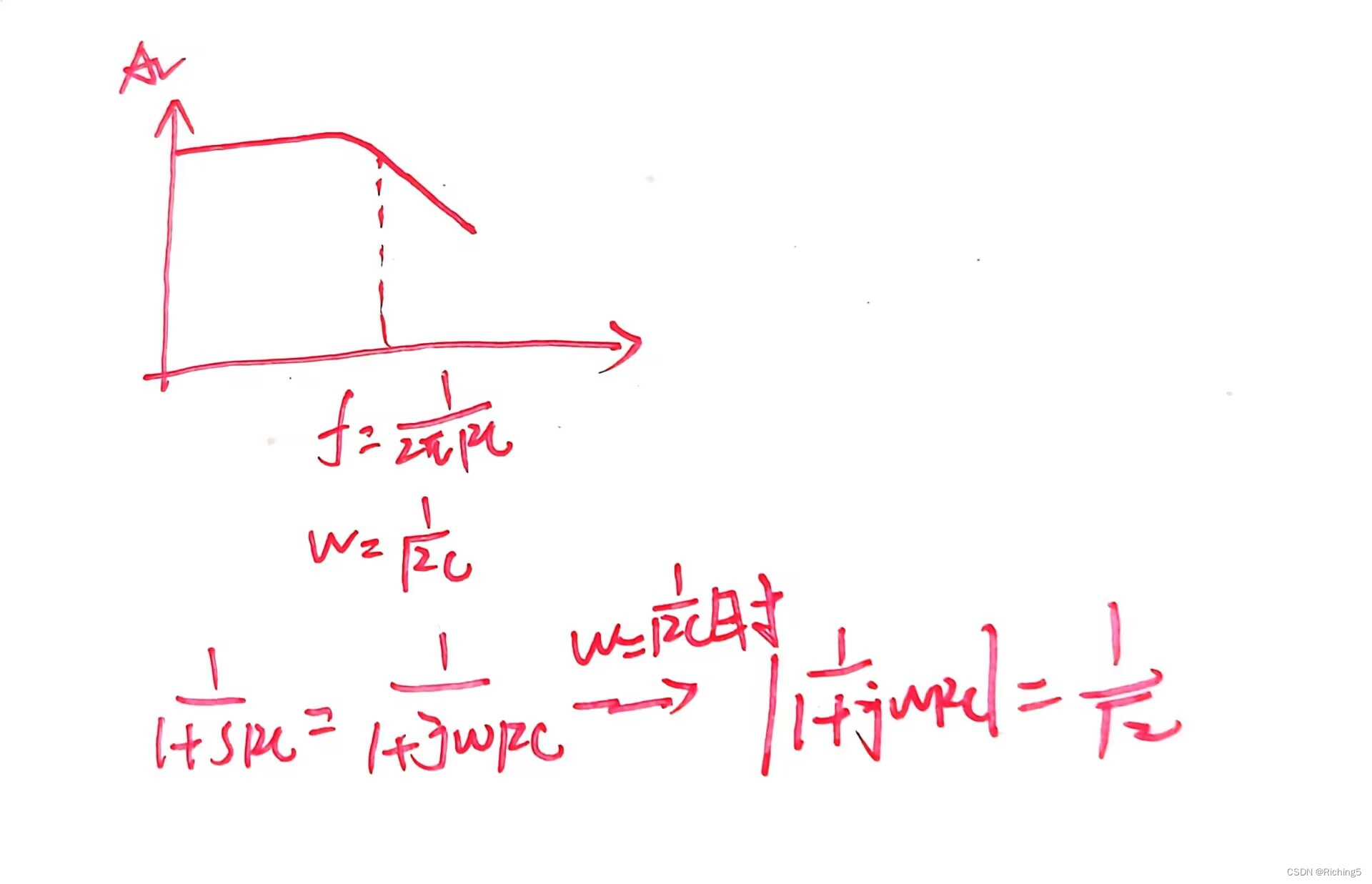
单极点系统的频率响应
A v = A v d c ∗ ( 1 / ( 1 + s R C ) ) Av=Av_dc*(1/(1+sRC)) Av=Avdc∗(1/(1+sRC)),系统的极点是 p = − 1 / R C p=-1/RC p=−1/RC。零极点是用于判断系统的稳定性的,传递函数的模值随s(频率)的变化便是频率响应的曲线。
在频率响应的曲线中,当
w
=
∣
p
∣
=
1
/
R
C
w=|p|=1/RC
w=∣p∣=1/RC时,传递函数的模值
∣
1
/
(
1
+
s
R
C
)
∣
|1/(1+sRC)|
∣1/(1+sRC)∣变为
1
/
s
q
r
t
(
2
)
1/sqrt(2)
1/sqrt(2),对应AV(dB)减少3dB时。
零极点对频率响应曲线的影响
零点和极点对频率响应的影响 - 模拟集成电路之频率响应分析零极点 - 电子发烧友网
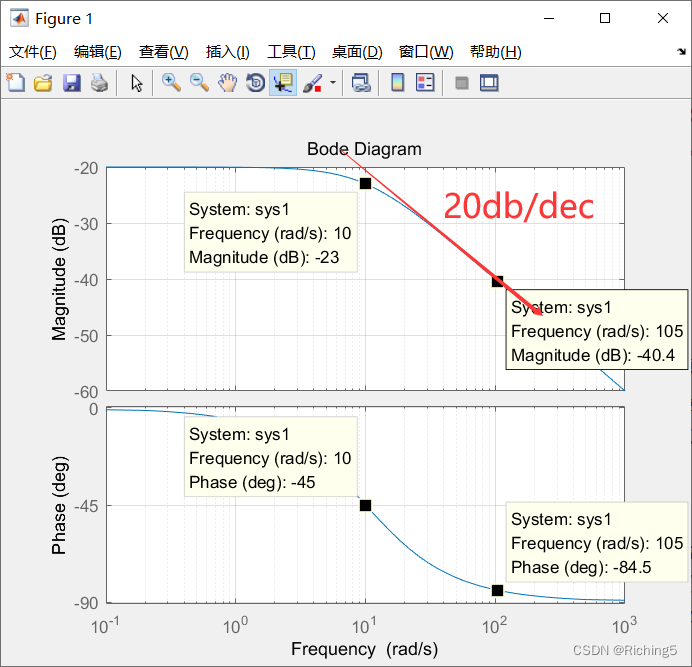
- 当频率远小于某零点/极点的模时,该零点/极点对频率响应的影响可以忽略。
- 当频率接近某极点的模时,该极点的效果渐渐体现。当频率远大于该极点时,该极点使得频率响应的幅度以20dB/dec的速度衰减,而相位相对DC产生-π/2的变化。
例如下图为传递函数为
H
(
s
)
=
1
/
(
s
+
10
)
H(s)=1/(s+10)
H(s)=1/(s+10)的频率响应和相位图:
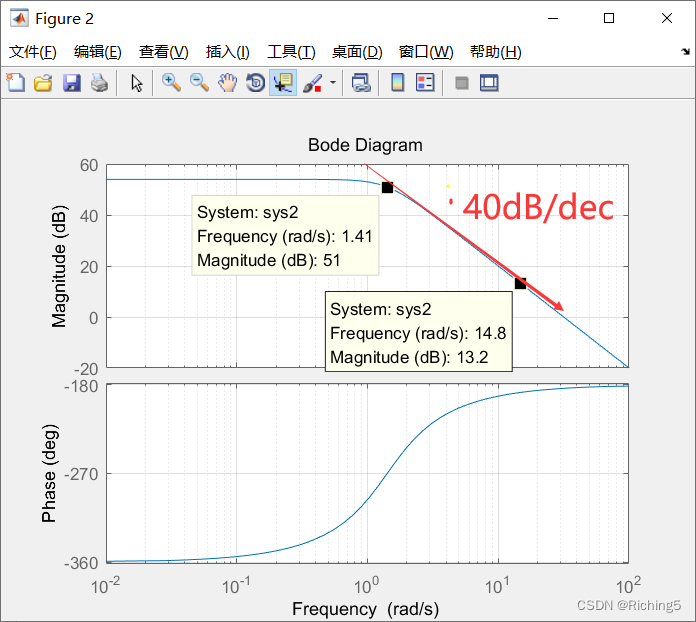
- 共轭极点是一种特殊的极点,它们总是成对出现且共轭极点对的模都相等,因此当频率远大于一对共轭极点的模的时候,该共轭极点对会使频率响应的幅度以40dB/dec的速度衰减,而相位相对DC产生-π的变化。而在频率接近共轭极点对的模的时候,频率响应曲线的变化取决于共轭极点对的位置(详见原文)。
例如下图为传递函数为
H
(
s
)
=
1000
/
(
s
2
−
2
s
+
2
)
H(s)=1000/(s^2-2s+2)
H(s)=1000/(s2−2s+2)的频率响应和相位图:
- 当频率接近某零点的模时,该零点的效果渐渐体现。当频率远大于该零点时,该零点使得频率响应的幅度以20dB/dec的速度增加。而相位相对DC产生π/2(当零点在左半平面)或-π/2(当零点在右半平面)的变化。
例如下图为传递函数为 H ( s ) = 1000 ( s − 10 ) H(s)=1000(s-10) H(s)=1000(s−10)的频率响应和相位图:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-uWQT1BUY-1683378084576)(%E5%AF%B9%E4%BC%A0%E9%80%92%E5%87%BD%E6%95%B0%E7%9A%84%E9%9B%B6%E6%9E%81%E7%82%B9%E3%80%81%E9%A2%91%E7%8E%87%E5%93%8D%E5%BA%94%E3%80%81%E7%A8%B3%E5%AE%9A%E6%80%A7%E7%9A%84%E7%90%86%E8%A7%A3%2056e632a7dbe64aeabb65b3051d4c17cb/Untitled%202.png)]](https://img-blog.csdnimg.cn/67b5bf0e4622499194d39e3747ef7e65.png)
- 频率响应的总体幅度/相位取决于所有零点和极点对幅度/相位的贡献。
matlab构造传递函数和绘制波特图
Matlab仿真001-传递函数_传递函数 matlab_k_c_c_的博客-CSDN博客
所用到的matlab函数
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-f9qZWcWJ-1683378084576)(%E5%AF%B9%E4%BC%A0%E9%80%92%E5%87%BD%E6%95%B0%E7%9A%84%E9%9B%B6%E6%9E%81%E7%82%B9%E3%80%81%E9%A2%91%E7%8E%87%E5%93%8D%E5%BA%94%E3%80%81%E7%A8%B3%E5%AE%9A%E6%80%A7%E7%9A%84%E7%90%86%E8%A7%A3%2056e632a7dbe64aeabb65b3051d4c17cb/Untitled%203.png)]](https://img-blog.csdnimg.cn/6133d71b90954645a89833e4758f80c7.png)
多个角度理解极点与零点,电容充放电的联系
【模拟IC学习】多个角度理解极点与零点,电容充放电的联系
时域上看极点的作用
模拟电路基础之频率响应(一)极点的物理意义
极点时是从一个结点看进去所有电阻和电容的乘积,这里以RC电路为例说明极点的作用,或者说RC对于不同信号频率的作用。
首先需要知道Vout是怎么随着Vin变化的:从电流方向来看,当Vin大于Vout时,电流流向C为充电,Vout会增加,直到Vout=Vin;反之为放电,Vout会减少直到Vout=Vin。这里Vin是主动变化,Vout是被动跟随Vin。而且充放电是需要时间的,这与Fin和C的相对大小有关,Fin越大,C越小充电越快,Vout跟随Vin越好。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Uz5DT40a-1683378084577)(%E5%AF%B9%E4%BC%A0%E9%80%92%E5%87%BD%E6%95%B0%E7%9A%84%E9%9B%B6%E6%9E%81%E7%82%B9%E3%80%81%E9%A2%91%E7%8E%87%E5%93%8D%E5%BA%94%E3%80%81%E7%A8%B3%E5%AE%9A%E6%80%A7%E7%9A%84%E7%90%86%E8%A7%A3%2056e632a7dbe64aeabb65b3051d4c17cb/Untitled%204.png)]](https://img-blog.csdnimg.cn/550d09ac924f451988f25a67bf5d65fb.png)
还需要知道相位差和时延的关系:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-GTAChUvl-1683378084577)(%E5%AF%B9%E4%BC%A0%E9%80%92%E5%87%BD%E6%95%B0%E7%9A%84%E9%9B%B6%E6%9E%81%E7%82%B9%E3%80%81%E9%A2%91%E7%8E%87%E5%93%8D%E5%BA%94%E3%80%81%E7%A8%B3%E5%AE%9A%E6%80%A7%E7%9A%84%E7%90%86%E8%A7%A3%2056e632a7dbe64aeabb65b3051d4c17cb/Untitled%205.png)]](https://img-blog.csdnimg.cn/c919c0e716bb401ca7576501a9786d87.png)
- 根据波特图,当输入信号Vin的频率为1/2πRC时,Vout的相位会滞后45°,幅值会变为原来的 1 / 2 1/\sqrt2 1/2。
理论上时域会相差8/T。在仿真中设置R=1K,C=1p,fin=159Mhz,Tin=6.28ns,amplitude=1,所以输出滞后输入0.785ns,幅值变为0.707,符合波特图:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-OhWqnGdY-1683378084578)(%E5%AF%B9%E4%BC%A0%E9%80%92%E5%87%BD%E6%95%B0%E7%9A%84%E9%9B%B6%E6%9E%81%E7%82%B9%E3%80%81%E9%A2%91%E7%8E%87%E5%93%8D%E5%BA%94%E3%80%81%E7%A8%B3%E5%AE%9A%E6%80%A7%E7%9A%84%E7%90%86%E8%A7%A3%2056e632a7dbe64aeabb65b3051d4c17cb/Untitled%206.png)]](https://img-blog.csdnimg.cn/a5cefe1908854f6ab89583d3c35a77d8.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-VrzYSj5p-1683378084578)(%E5%AF%B9%E4%BC%A0%E9%80%92%E5%87%BD%E6%95%B0%E7%9A%84%E9%9B%B6%E6%9E%81%E7%82%B9%E3%80%81%E9%A2%91%E7%8E%87%E5%93%8D%E5%BA%94%E3%80%81%E7%A8%B3%E5%AE%9A%E6%80%A7%E7%9A%84%E7%90%86%E8%A7%A3%2056e632a7dbe64aeabb65b3051d4c17cb/Untitled%207.png)]](https://img-blog.csdnimg.cn/1f38f96ffe404ff6b89e8b08768a355e.png)
从时域上理解为,对C充放电是需要时间的,C越大充放电越慢,当Vin>Vout时,C在充电电流下,Vout逐渐上升,但还没上升到和Vin幅度一样,Vin已经下降到Vin=Vout,导致Vout不能充电到Vin_max就开始放电了,当然放电也需要时间,所以Vout还没放电到Vin_min时就结束放电开始充电了。综上我们看到Vout不仅滞后Vin,并且幅度也小了。
- fin<<1/2πRC时,或者说C很小时,或者说是直流输入时,极点的影响就很小:
这是因为C很小,充放电很快,或者说Vin变化很慢,Vout很容易跟随。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-MhY8GMOk-1683378084578)(%E5%AF%B9%E4%BC%A0%E9%80%92%E5%87%BD%E6%95%B0%E7%9A%84%E9%9B%B6%E6%9E%81%E7%82%B9%E3%80%81%E9%A2%91%E7%8E%87%E5%93%8D%E5%BA%94%E3%80%81%E7%A8%B3%E5%AE%9A%E6%80%A7%E7%9A%84%E7%90%86%E8%A7%A3%2056e632a7dbe64aeabb65b3051d4c17cb/Untitled%208.png)]](https://img-blog.csdnimg.cn/b3be8e7f2a7e49bea00ba664b912053c.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Y6fpwTb1-1683378084579)(%E5%AF%B9%E4%BC%A0%E9%80%92%E5%87%BD%E6%95%B0%E7%9A%84%E9%9B%B6%E6%9E%81%E7%82%B9%E3%80%81%E9%A2%91%E7%8E%87%E5%93%8D%E5%BA%94%E3%80%81%E7%A8%B3%E5%AE%9A%E6%80%A7%E7%9A%84%E7%90%86%E8%A7%A3%2056e632a7dbe64aeabb65b3051d4c17cb/Untitled%209.png)]](https://img-blog.csdnimg.cn/59ee5d6f04ae41b7a7518b7c974ede01.png)
- 当但fin>>1/2πRC时,或者说C很大时,极点的影响就很大,但一个极点最多只能产生90°的相移:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-2E0fsENG-1683378084579)(%E5%AF%B9%E4%BC%A0%E9%80%92%E5%87%BD%E6%95%B0%E7%9A%84%E9%9B%B6%E6%9E%81%E7%82%B9%E3%80%81%E9%A2%91%E7%8E%87%E5%93%8D%E5%BA%94%E3%80%81%E7%A8%B3%E5%AE%9A%E6%80%A7%E7%9A%84%E7%90%86%E8%A7%A3%2056e632a7dbe64aeabb65b3051d4c17cb/Untitled%2010.png)]](https://img-blog.csdnimg.cn/e254f2e0b80648f2bb677f8a8184f073.png)
那为什么最大只有90°相移呢?随着fin的增加,或者说C很大,充放电极其慢。可以看下图固定输入频率,不断增加C。随着C增加下Vout=Vin的交点越靠近Vin=0。那最坏的极限情况是,当Vin=0时,Vout才充电到最大随后开始放电,此时Vout的最大值与Vin的最大值时间上相差T/4,对应相移90°。而最坏时Vout的最大接近为0,这就像往海里扔一块石子,对海平面的影响微乎其微。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-PqEF9epf-1683378084579)(%E5%AF%B9%E4%BC%A0%E9%80%92%E5%87%BD%E6%95%B0%E7%9A%84%E9%9B%B6%E6%9E%81%E7%82%B9%E3%80%81%E9%A2%91%E7%8E%87%E5%93%8D%E5%BA%94%E3%80%81%E7%A8%B3%E5%AE%9A%E6%80%A7%E7%9A%84%E7%90%86%E8%A7%A3%2056e632a7dbe64aeabb65b3051d4c17cb/Untitled%2011.png)]](https://img-blog.csdnimg.cn/6e8a238738044d0097efbdc3ccbf7116.png)
零点的直接理解
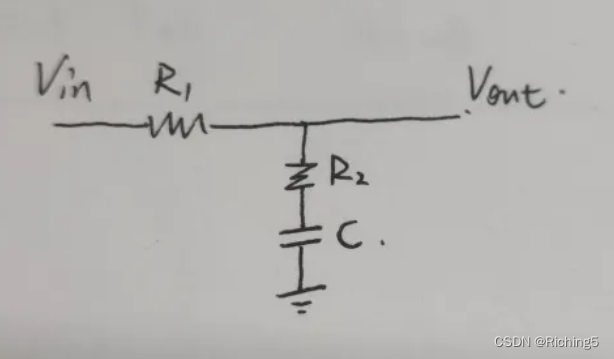
零点是由于前馈通路造成的。本来通路中有一个极点,会造成相位延迟和增益下降。但是如果在输入与输出之间有一条前馈通路,如下图中的Cz所示,可以让信号不通过极点所在的结点而是通过前馈通路直接到达,那么极点所造成的影响就会被部分抵消。极限情况就是信号完全通过通路到达输出,把极点所带来的相位延迟全部抵消。因此可以知道零点最大可以带来90°的相位超前(但是这儿的超前不是说输出超前于输入,只是可以把极点带来的相位延迟进行一定的补偿)。
下图传递函数的极点低于零点,所以极点的效果会先出现——系统会先出现相位延迟。随着频率升高,信号会更多的从Cz通过,补偿极点带来的相位延迟。最终频率足够高时,信号完全从Cz通过,此时电路等效为Cz和C的分压电路,此时极点与零点对相位影响完全抵消。
(注意图中P和Z是极点频率,即极点的模值,所以是正值;如果极点频率单位为Hz,还需要除以2π)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UwhYif6N-1683378084580)(%E5%AF%B9%E4%BC%A0%E9%80%92%E5%87%BD%E6%95%B0%E7%9A%84%E9%9B%B6%E6%9E%81%E7%82%B9%E3%80%81%E9%A2%91%E7%8E%87%E5%93%8D%E5%BA%94%E3%80%81%E7%A8%B3%E5%AE%9A%E6%80%A7%E7%9A%84%E7%90%86%E8%A7%A3%2056e632a7dbe64aeabb65b3051d4c17cb/Untitled%2012.png)]](https://img-blog.csdnimg.cn/88bd6f403a3d4b4db3d88aaf65f76874.png)
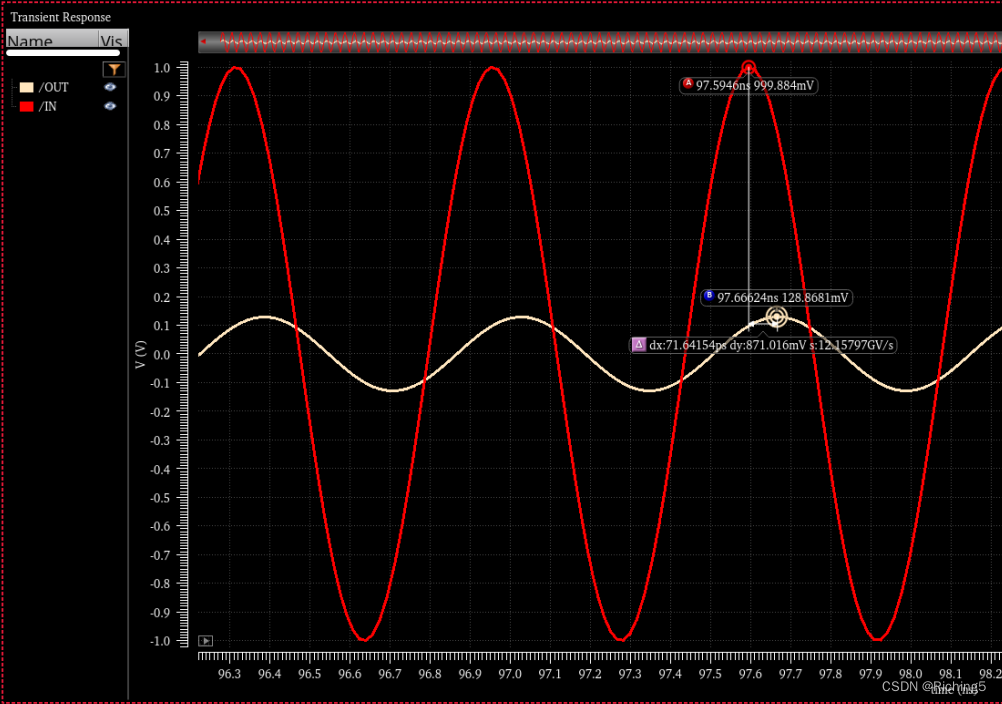
仿真一下这个电路,设置Cz=0.1pF,C=1pF,R=1k,极点频率=156Mhz,零点频率=1560Mhz。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-FfCVoiji-1683378084580)(%E5%AF%B9%E4%BC%A0%E9%80%92%E5%87%BD%E6%95%B0%E7%9A%84%E9%9B%B6%E6%9E%81%E7%82%B9%E3%80%81%E9%A2%91%E7%8E%87%E5%93%8D%E5%BA%94%E3%80%81%E7%A8%B3%E5%AE%9A%E6%80%A7%E7%9A%84%E7%90%86%E8%A7%A3%2056e632a7dbe64aeabb65b3051d4c17cb/Untitled%2013.png)]](https://img-blog.csdnimg.cn/a48fadbd09144294a8d1905a287d1a65.png)
当Fin=156Mhz时,可以看到主要是极点起作用,延时和幅度衰减和前文分析一致。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-WQfd4Pid-1683378084581)(%E5%AF%B9%E4%BC%A0%E9%80%92%E5%87%BD%E6%95%B0%E7%9A%84%E9%9B%B6%E6%9E%81%E7%82%B9%E3%80%81%E9%A2%91%E7%8E%87%E5%93%8D%E5%BA%94%E3%80%81%E7%A8%B3%E5%AE%9A%E6%80%A7%E7%9A%84%E7%90%86%E8%A7%A3%2056e632a7dbe64aeabb65b3051d4c17cb/Untitled%2014.png)]](https://img-blog.csdnimg.cn/3d9bfb2088074c03aaa1d5f0c414127c.png)
当Fin=1560Mhz,此时相位差回到45°,还是滞后T/4(注意这里Fin变为前面的十倍,周期为1/10),幅值为原来的1/6。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-awmG6pJy-1683378084581)(%E5%AF%B9%E4%BC%A0%E9%80%92%E5%87%BD%E6%95%B0%E7%9A%84%E9%9B%B6%E6%9E%81%E7%82%B9%E3%80%81%E9%A2%91%E7%8E%87%E5%93%8D%E5%BA%94%E3%80%81%E7%A8%B3%E5%AE%9A%E6%80%A7%E7%9A%84%E7%90%86%E8%A7%A3%2056e632a7dbe64aeabb65b3051d4c17cb/Untitled%2015.png)]](https://img-blog.csdnimg.cn/f074b8366a31487a8fe9b14dc78b610f.png)
当Fin=15600Mhz,此时相位差为0,幅值为原来的0.09,是电容分压产生。
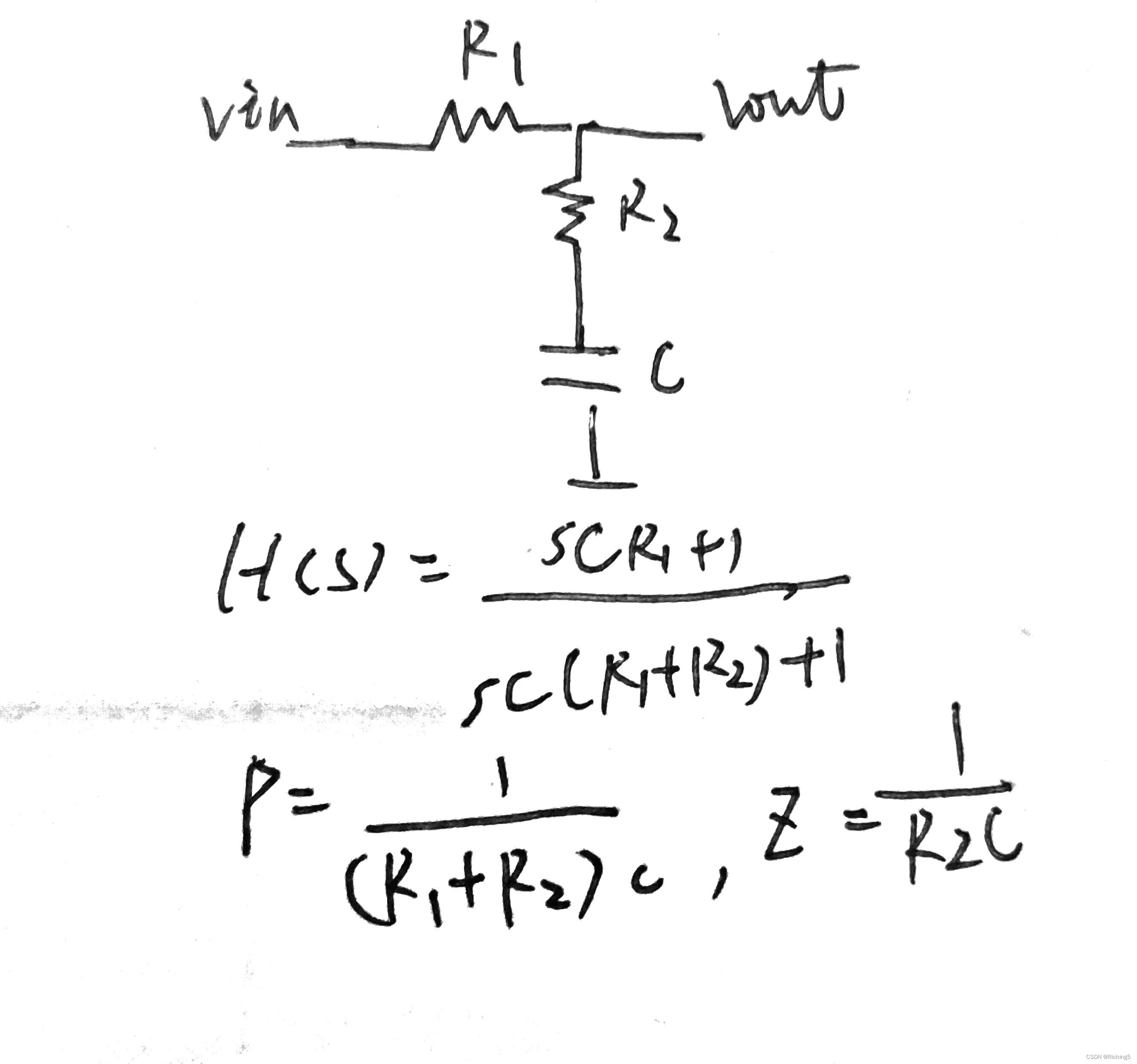
输出节点串联R+C会引入零点
信号传递过程中,一样要给电容充电,所以有相位延迟和幅度降低,因此会产生一个极点。给电容充电过程中电流要流过电阻,因此电阻两端要产生压差,一定程度上增加了输出端口的电压,降低了延迟并且阻碍了幅度降低,因此体现为一个零点。
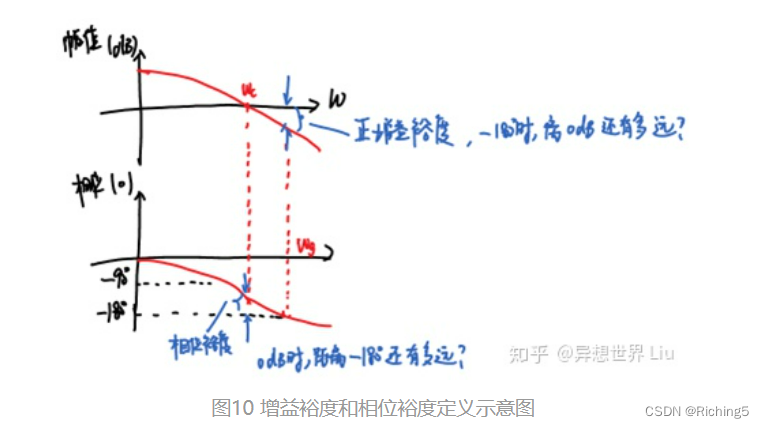
相位裕度PM
定义为开环增益为0dB时,PM=180°+φ(w),φ(w)是频率为w时的相位角,代表增益0dB时,相位角离-180°的距离。越正越好。
零极点对稳定性的影响
在普通的电路里,极点都是左半平面的,即通过s参数算出来是负的,因为右半平面的极点在时域会使信号不断发散。零点可以在左半平面,也可以在右半平面。算出来是负的就在左平面,算出来是正的就在右平面。
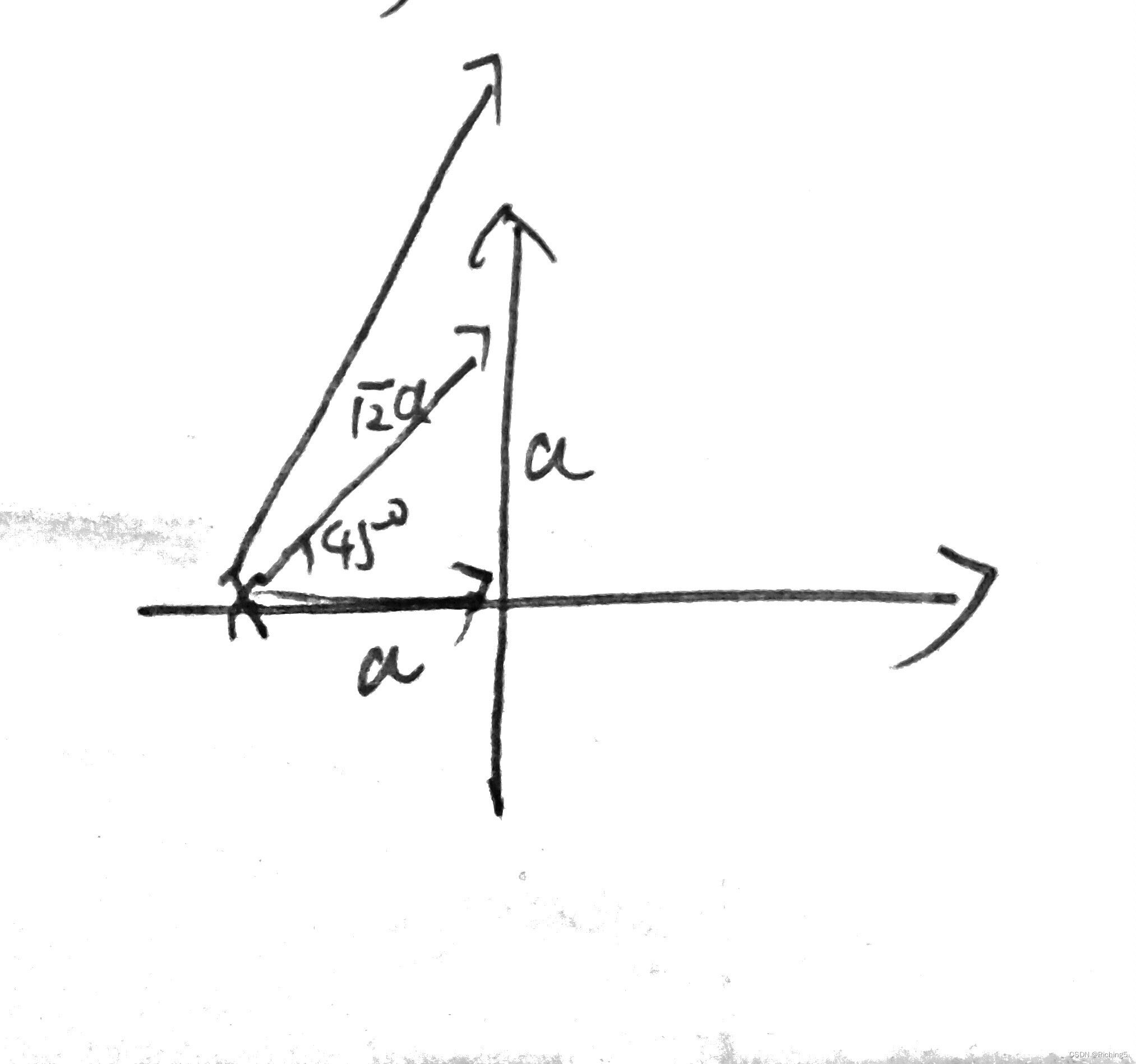
用矢量作图法看极点的影响:当w=0时,即直流增益等于极点到原点的距离a的倒数,随着频率w的增加,距离逐渐增加,增益逐渐减少,当矢量与正半轴的夹角为45°时,即一个极点贡献的相位角是0-45°=-45°,对应相位为-45°,距离的倒数为 a / 2 a/\sqrt2 a/2,对应增益减少3dB,都对应前面的分析。零点也可以做类似分析。
那当有反馈的系统存在右半平面的零点为什么会不稳定?
根据矢量分析法,右半平面的实零点贡献的相位是负的。因为当w=z的虚部时,贡献的相位是π+π=0°,当f增加时,最终贡献的相位是π+π/2,=-pi/2。
本来电路中的常存在的左半面极点就会贡献负的相位角,如果还存在右半面的零点,更容易导致增益为0dB时,相位裕度不满足要求。与此同时,左半平面零点贡献的相位是正的,更有利于相位裕度。
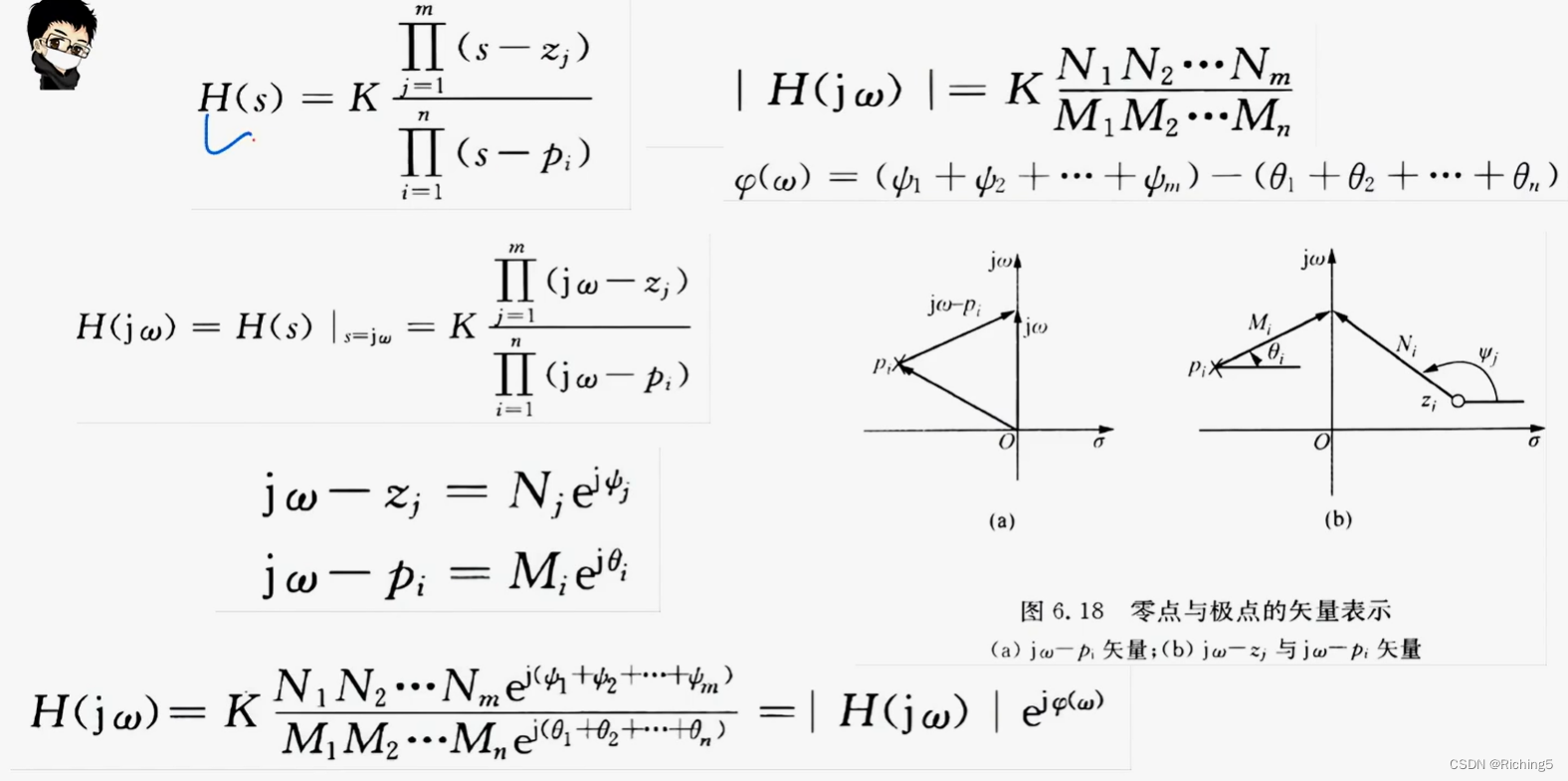
矢量作图法分析系统的幅频、相频曲线
可以通过矢量作图法分析系统的幅频、相频曲线。
首先将传输函数化为零极点的标准形式,在复平面上画下零极点的位置。
频率变化时,也就是扫描虚轴,从负无穷到正无穷。
对于幅频特性曲线,扫描虚轴,求出每个零极点到虚轴上某点的距离的模值,按下面公式相比乘K得到幅频特性曲线;对于相频特性曲线,扫描虚轴,求出每个零极点指向虚轴上某点的矢量与正实轴形成的夹角,将零点的夹角求和减去极点的夹角和。注意:对于右零点,或者右极点算相位贡献时,画矢量图,考虑负号的影响,需要加上一个附加相位pi