人脸识别--传统+深度方法
人脸识别算法--非深度方法
在前深度学习时代,非深度的方法探索了不同的人脸识别算法。
先考虑一下非深度学习时代,人脸识别难在哪?或者说目标识别的难点在哪?
图像是一个高度冗余的数据。
* 图像数据中包含大量与语义无关的内容
* 图像数据中还包含大量噪声
所有的图像识别算法,都是在解决这个问题。
也就是说,如何从冗余的数据中,提取出关键的信息。
深度学习通过不断的卷积,越来越多的通道数量,以及大量的参数解决这个问题。
非深度方法如何处理?
PCA(主成分分析)
**动机**:
- 将高维特征映射到低维特征,减少计算复杂度和存储空间
- 从数据中提取最相关信息
**问题定义**:
将一个n维数据,映射到k维上。
**基本思想**:
什么才是最不冗余的坐标轴?
只有正交的坐标轴,才是最不冗余的。
因此,PCA的工作就是从原始空间中,顺序的找到一组组正交的坐标轴
例如,第一个坐标轴的选择,是原始数据中,方差最大的方向;
第二个坐标轴是与第一个坐标轴正交的平面中,方差最大的;依次类推。
最终,可以得到n个坐标轴。
我们可以发现一个问题:大部分的方差都集中在某几个维度中,其余维度的方差几乎没有。
因此,舍弃m个轴,保留方差最大的k个轴,从而实现对数据的降维。
**问题**:
如何得到包含最大差异的主成分方向?
**协方差矩阵**

协方差矩阵中,对角线位置是描述了每个维度本身的数据差异程度,而其余点则描述了不同维度之间的数据差异程度。
那么回顾一下我们的问题:如何找出数据的最大方差的方向?
也就是说,我们要把协方差矩阵进行降复杂度,也就是说,我们把里面一些数据轴删除以后(值为零),这个矩阵和原来看起来差距不大。
**特征值分解**
特征值越大,重建出的矩阵为第一大主成分

**实现特征值分解:SVD**
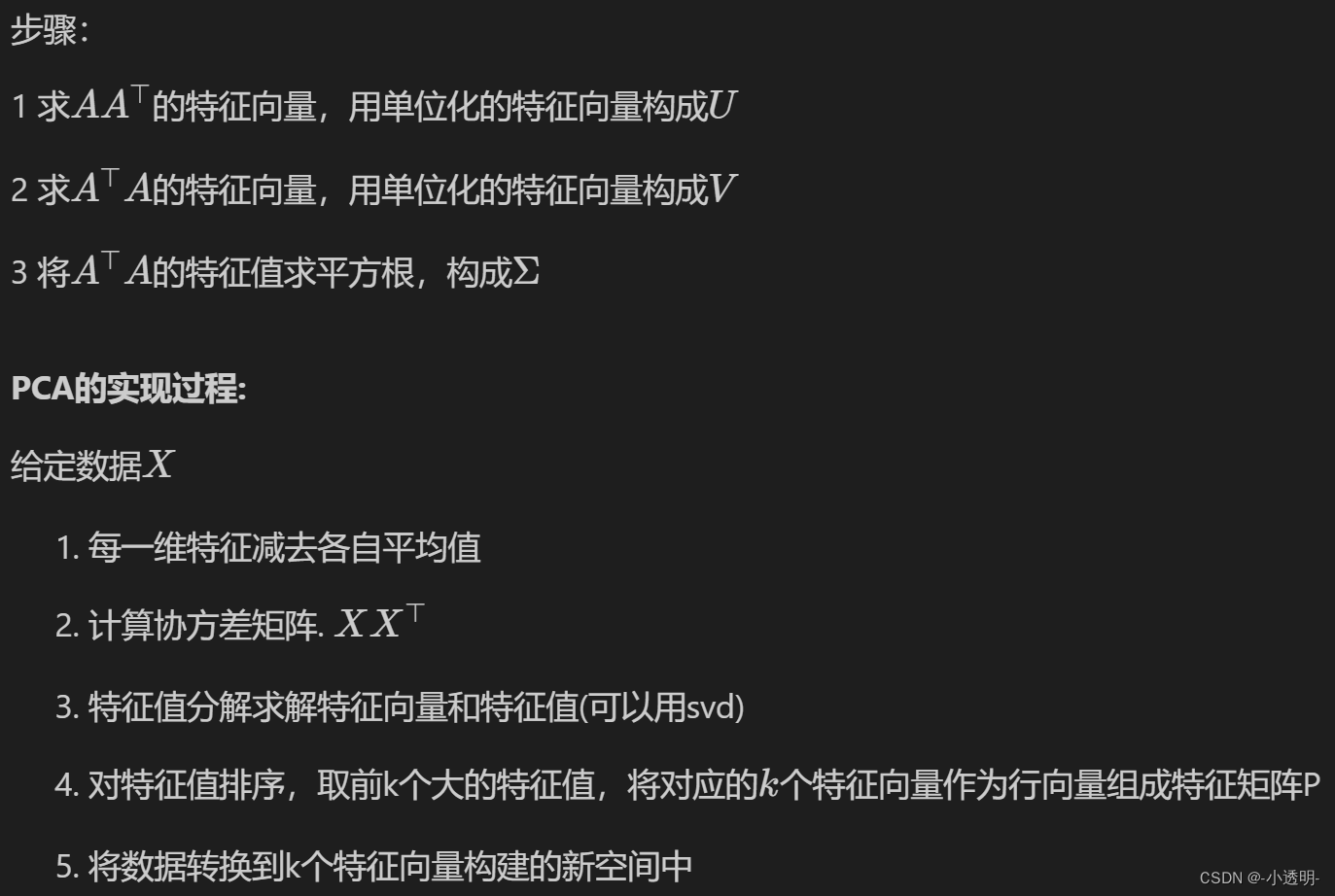
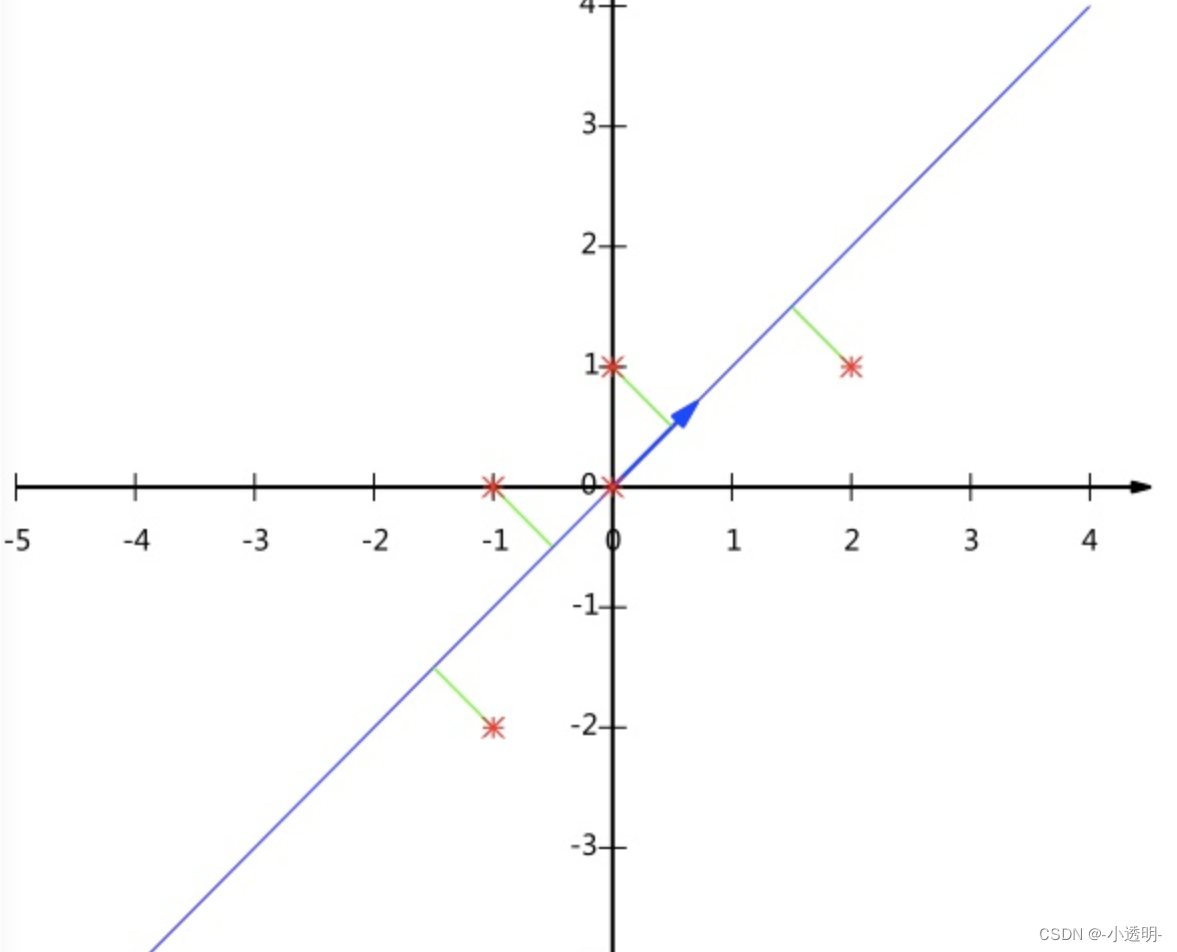
PCA的直观感受
**PCA的代码实现**
import numpy as np
X = np.array([[-1, 1], [-2, -1], [-3, -2], [1, 1], [2, 1], [3, 2]])
n_samples, n_features = X.shape
mean=np.array([np.mean(X[:,i]) for i in range(n_features)])
norm_X=X-mean
scatter_matrix=np.dot(np.transpose(norm_X),norm_X)
eig_val, eig_vec = np.linalg.eig(scatter_matrix)
print(eig_val)
print()
print(eig_vec)
eig_pairs = [(np.abs(eig_val[i]), eig_vec[:,i]) for i in range(n_features)]
eig_pairs.sort(reverse=True)
feature=np.array([ele[1] for ele in eig_pairs[:1]])
print(feature)
data=np.dot(norm_X,np.transpose(feature))
print(data)opencv的使用方法
```
import cv2
pca = cv2.PCACompute(X, mean=None, maxComponents=2)
```
那么PCA和人脸识别有什么关联呢?
我们可以将人脸图像视为一个高维数据
将人脸变换到一个共同的子空间上,在这个子空间中进行识别与辨识,就能提高准确率。
本质上,PCA是一种空间变换方法。
特征脸人脸识别
人脸识别问题,在特征脸看来,就是一个人脸特征分布识别的问题。
首先,训练集中每一个人脸,都被认为是一个坐标轴
一个新的人脸,在每个人脸坐标轴上,都有一个投影。
在那个人脸坐标轴上投影的多,就是哪个人脸。
具体步骤
选 基向量 (对于一张新的人脸:减去平均后与特征矩阵相乘(投影),得到每一维的概率)
1. 获取所有人的人脸图像各1张
2. 计算平均人脸
每张人脸都拉长为一个向量
对应维度的向量求平均,得到一个平均向量
3. 计算每张图像与平均图像的差值
4. 把差值图像集合成矩阵,用pca找到n个特征向量(基向量)组成矩阵P(这里可以求转置的特征向量)
5. 对于一张新人脸,进行矩阵变换,得到新的向量
6. 新的向量与所有人脸图像的差值求取距离,足够近的距离则表示人脸被识别成功。