“Hopf Oscillator-Based Gait Transition for A Quadruped Robot“代码复现
paper链接:https://ieeexplore.ieee.org/abstract/document/7090642/
import math
import numpy as np
import matplotlib.pyplot as plt
# 设置中文显示
plt.rcParams['font.sans-serif'] = ['SimHei'] # 设置中文字体为黑体
plt.rcParams['axes.unicode_minus'] = False # 解决负号'-'显示为方块的问题
class CPG(object):
def __init__(self, gait=0):
self.gait_num = 3
self.gait_names = ["Walk","Trot", "Pace", "Bound"]
self.labels = ['FL', 'FR', 'HL', 'HR']
# CPG构建基本参数
self._alpha = 100
self.leg_num = 4
self.gait = gait
self.mu_ = -1
self._a = 50
self.u1 = 0
self.u2 = 0
# 负载系数对相关参数影响
self.BEAT_ = [0.75, 0.5, 0.5, 0.5]
self.period_ = [0.6, 0.5, 0.5, 0.4]
self._beta = self.BEAT_[0]
self._t = self.period_[0]
# 时间
self.t_step = 0.001
self.point_x = np.zeros(self.leg_num)
self.point_y = np.zeros(self.leg_num)
self.PHASE = [
[0 * 2 * np.pi, 0.5 * 2 * np.pi, 0.25 * 2 * np.pi, 0.75 * 2 * np.pi],
[0 * 2 * np.pi, 0.5 * 2 * np.pi, 0.5 * 2 * np.pi, 0 * 2 * np.pi],
[0 * 2 * np.pi, 0.5 * 2 * np.pi, 0 * 2 * np.pi, 0.5 * 2 * np.pi],
[0 * 2 * np.pi, 0 * 2 * np.pi, 0.5 * 2 * np.pi, 0.5 * 2 * np.pi],
]
# 相对相位矩阵
self.R_cell = np.zeros(shape=(self.leg_num, self.leg_num, 2, 2))
self.Phi = None
# 初始值,非0即可
self.leg_x = None
self.leg_y = None
self.reset()
# 计数,什么时候完成相位同步
self.count_ = 0
# 计数,什么时候结束步态转换
self.t_count_ = 0
self.init_phase()
def init_phase(self):
for _ in range(700):
self.step()
def reset(self):
self._beta = self.BEAT_[self.gait]
self._t = self.period_[self.gait]
self.Phi = self.PHASE[self.gait]
self.leg_x = np.ones(self.leg_num) * 0.0001
self.leg_y = np.ones(self.leg_num) * 0.0001
self.update_rotation_matrix()
def next_gait(self):
self.gait = (self.gait + 1) % self.gait_num
self.reset()
def update_rotation_matrix(self):
for i in np.arange(0, self.leg_num):
for j in np.arange(0, self.leg_num):
self.R_cell[j, i] = np.array([
[np.cos(self.Phi[i] - self.Phi[j]), - np.sin(self.Phi[i] - self.Phi[j])],
[np.sin(self.Phi[i] - self.Phi[j]), np.cos(self.Phi[i] - self.Phi[j])]
])
def transit_gait(self, tau=0):
self.t_count_ = self.t_count_ + 1
# 步态在一个周期内完成转换
if tau == 0:
# walk to trot
# beta/φ2从0.75变换到0.5
# walk步态周期为0.6,假设在1s内完成转换,共200步,每步变换1/800=0.00125
transit_step = 0.00125
self.Phi[0] = 0
# self.Phi[1] = 0.5
phi2_ = 0.75 - transit_step * self.t_count_
self.Phi[2] = phi2_ * 2 * np.pi
self.Phi[3] = (phi2_ - 0.5) * 2 * np.pi
# 更新占空比参数和周期参数
self._beta = phi2_
else:
# trot to gallop
# φ1从0.5到0,0.5/200=1/400=0.0025
transit_step = 0.0025
phi1_ = 0.5 - transit_step * self.t_count_
self.Phi[1] = phi1_ * 2 * np.pi
self.Phi[3] = (0.5 - phi1_) * 2 * np.pi
if self.t_count_ >= 200:
self.t_count_ = 0
if tau == 0:
self._t = 0.5
else:
self._t = 0.4
self.update_rotation_matrix()
def step(self):
if self.count_ > 400:
self.mu_ = 1
self.count_ = self.count_ + 1
if self.count_ > 1200 and self.count_ <= 1400:
self.transit_gait(tau=0)
if self.count_ > 1800 and self.count_ <= 2000:
self.transit_gait(tau=1)
for _ in range(5):
for i in np.arange(0, self.leg_num):
r_pow = (self.leg_x[i] - self.u1) ** 2 + (self.leg_y[i] - self.u2) ** 2
W = math.pi / (self._beta*self._t*(math.exp(-self._a*self.leg_y[i]) + 1)) + math.pi / ((1-self._beta)*self._t*(math.exp(self._a*self.leg_y[i]) + 1))
V = np.matmul(np.array([[self._alpha * (self.mu_ - r_pow), - W], [W, self._alpha * (self.mu_ - r_pow)]]),
np.array([[self.leg_x[i] - self.u1], [self.leg_y[i] - self.u2]])) + \
np.matmul(self.R_cell[0, i], np.array([[self.leg_x[0] - self.u1], [self.leg_y[0] - self.u1]])) + \
np.matmul(self.R_cell[1, i], np.array([[self.leg_x[1] - self.u2], [self.leg_y[1] - self.u2]])) + \
np.matmul(self.R_cell[2, i], np.array([[self.leg_x[2] - self.u1], [self.leg_y[2] - self.u2]])) + \
np.matmul(self.R_cell[3, i], np.array([[self.leg_x[3] - self.u1], [self.leg_y[3] - self.u2]]))
self.leg_x[i] = self.leg_x[i] + V[0, 0] * self.t_step
self.leg_y[i] = self.leg_y[i] + V[1, 0] * self.t_step
for i in range(0, self.leg_num):
self.point_x[i] = self.leg_x[i]
self.point_y[i] = self.leg_y[i]
if self.leg_y[i] > 0:
self.point_y[i] = 0
else:
self.point_y[i] = -self.leg_y[i]
return np.concatenate([[h, k] for h, k in zip(self.point_x, self.point_y)])
if __name__ == '__main__':
cpg = CPG(0)
step_num = 1800
plt.rcParams.update({'font.size': 20})
fig1 = plt.figure(figsize=(9, 6))
plt.subplots_adjust(left=None, bottom=None, right=None, top=None, wspace=None, hspace=0.5)
phases = np.stack(np.array([cpg.step() for _ in range(step_num)]), axis=1)
ax = plt.subplot(4, 1, 1)
leg_labels = ['FL', 'FR', 'HL', 'HR']
for i in range(4):
ax.plot(np.arange(0, step_num) * 0.005, phases[2 * i, :], linewidth=2, label=leg_labels[i])
ax.set_xlim(0,step_num * 0.005)
ax.legend(prop={'size': 14}, loc= 'lower right')
plt.show()
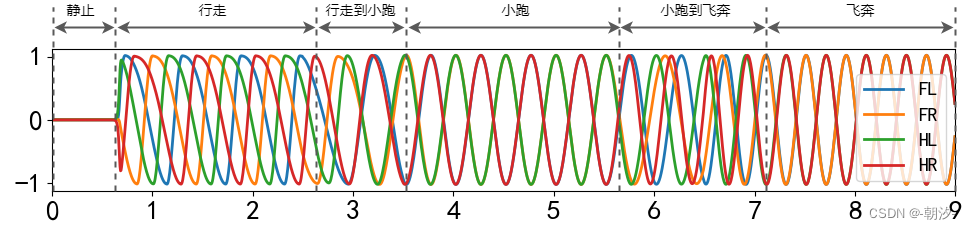
代码实现了从静止到行走(walk)到小跑(trot)再到飞奔(gallop)步态的转换。具体实现细节和解释有时间再写👌。
相关文章:raisimGymTorch的使用-CSDN博客