【BF+4D雷达成像】四维成像汽车MIMO雷达的波束赋形【附MATLAB代码】
摘要
本文提出了一种四维成像汽车多输入多输出(MIMO)雷达发射波束图的设计方法,以设计波束图与期望波束图之间的距离作为设计指标。利用nlp范数准则,我们考虑更宽范围的p值,特别是p ≥ 2和0 < p ≤ 1,以增强优化框架。这些标准下制定的优化问题有效地解决了使用块连续上限最小化(BSUM)技术的离散和连续相位约束。我们的分析验证了目标函数的收敛性,并证实了解决方案的收敛性,从而建立了一个新的停止标准,这个优化过程。此外,我们证明了我们提出的方法优于常用的全向波束图在各种汽车场景,突出其上级适应性和实用性在多个应用程序。此外,我们的方法表现出良好的性能和计算效率,使他们适合实时4-D成像汽车BSUM雷达应用。
引言
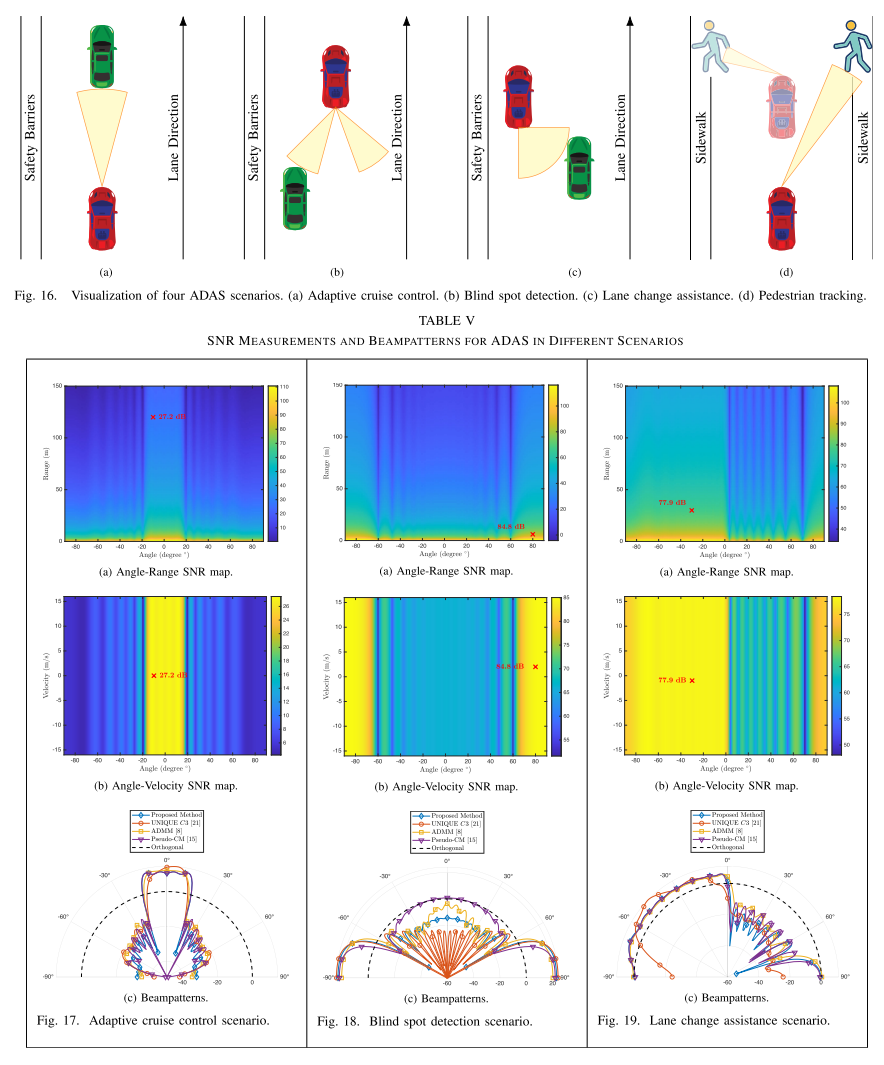
汽车行业中的多输入多输出(MIMO)雷达技术通过实现稳健的目标检测、精确定位和有效的干扰缓解来增强高级驾驶员辅助系统(ADAS)。实现全面的环境传感对于汽车安全系统至关重要。传统上,这一目的需要各种雷达技术,每种雷达技术都适用于特定的功能:用于自适应巡航控制的远程雷达(LRR),用于交叉路口警报和车道变换辅助的中程雷达(MRR),以及用于停车辅助,障碍物和行人检测以及盲点检测的短程雷达(SRR)。然而,同时使用这些雷达系统会给车辆架构集成和成本带来相当大的挑战。
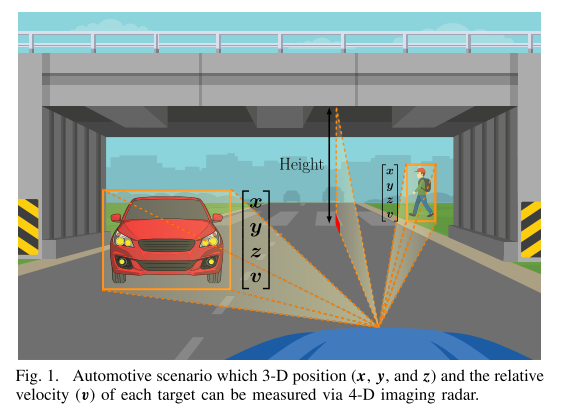
4D成像雷达是一种高分辨率、远距离传感器技术,对汽车行业至关重要,尤其是在ADAS中。与捕获距离、方向和相对速度的传统三维雷达不同,四维雷达还收集垂直信息,使其能够识别物体的高度,如图1所示。这种能力对于确定车辆是否能够适应桥梁等障碍物至关重要,并增强了各种驾驶条件下的物体检测和道路边界识别。4-D成像雷达通过提高环境感知和决策精度,支持更高水平的自动驾驶汽车的开发。此外,4-D成像技术是能够将LRR、MRR和SRR的功能集成到一个天线配置中的替代解决方案。这种方法需要通过自适应空间功率分布控制精确的雷达发射波束图设计。
雷达技术的最新进展已将雷达横截面(RCS)集成到4-D雷达数据中,从而导致5-D雷达的开发,以实现更好的环境感知[1]。利用5D雷达点云可以提高重建图像的精度,例如行人行为的解释[2]和睡眠姿势监测[3]。然而,5-D雷达增加的复杂性和数据处理要求提出了挑战。
雷达系统中的波束赋形可以通过两种主要方法来实现:天线布置和每个发射天线的码序列设计[4]。本文重点关注后者,探索代码设计来塑造和优化波束模式。MIMO雷达系统的最佳性能受波形设计的影响和波束图成形[5]。这些基本元素可以增强系统检测和分辨目标的能力,并产生更好的性能[6]。波束图成形过程需要在期望角度的特定空间区域内操纵辐射功率,同时减轻来自旁瓣回波的干扰以增强目标检测能力[7]。已经进行了大量的研究波束成形的波形设计,利用各种方法,关于变量选择,目标函数的确定,和约束施加。
MIMO雷达的波束图成形是一个描述为NP难和多变量的问题,具体到离散相位,在[23]中进行了讨论。使用块连续上限最小化(BSUM)方法,在每次迭代中将主函数逼近为更直接的形式,使问题更容易解决。当p ≥ 2时,该方法允许针对DQP范数的有效波束图案成形,表现出良好的性能。然而,该方法的局限性,包括其仅适用于离散相和对p值的特定约束,可以被视为其缺点。
在[24]中,使用两种基于CD的算法来解决具有CE约束的共位MIMO雷达的发射波形设计。第一种算法通过循环标量最小化来近似期望的波束方向图,从而解决了非凸问题。第二个是进一步完善,以近似指定的协方差矩阵。这两种方法,适用于有限字母和连续相位码,纳入战略,以减少计算成本。然而,在这项工作中采用Jacobi风格(一次性)CD方法,虽然实现了收敛,但速度很慢[25]。这主要是由于收敛所需的大量迭代,导致时间消耗增加。
为MIMO雷达设计码序列有助于以最适合雷达系统操作需求的特定方式形成波束图[27]。这些代码可以帮助实现各种期望的特性,例如波束转向,其将主波束聚焦在特定方向上。这是通过控制发射机上发射信号的相位和幅度来实现的[28]。
实时处理对于动态波束图调整至关重要,并且对于有效的目标跟踪和检测至关重要[29]。快速变化的场景需要高分辨率、实时的目标检测能力,这突出了先进雷达系统在即时数据处理和跟踪移动目标方面的重要性[30]。
本文通过提出一种BSUM框架内的方法,解决了汽车MIMO雷达系统中波束图成形的挑战。我们主要关注的是维护低复杂性解决方案的实际方面,这对于4-D成像场景中的真实世界应用是必要的。本文的主要工作总结如下。
1)我们通过应用BSUM方法,解决连续和离散相位约束(0 < p ≤ 1 ≤ p ≥ 2),使用BSUM准范数解决波束图成形问题。
2)我们提出了一种方法,用于提高空间功率分布的汽车雷达系统,专门为4-D成像应用。
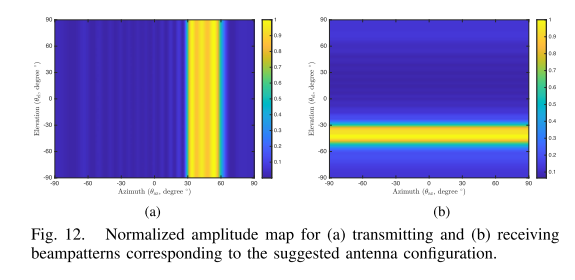
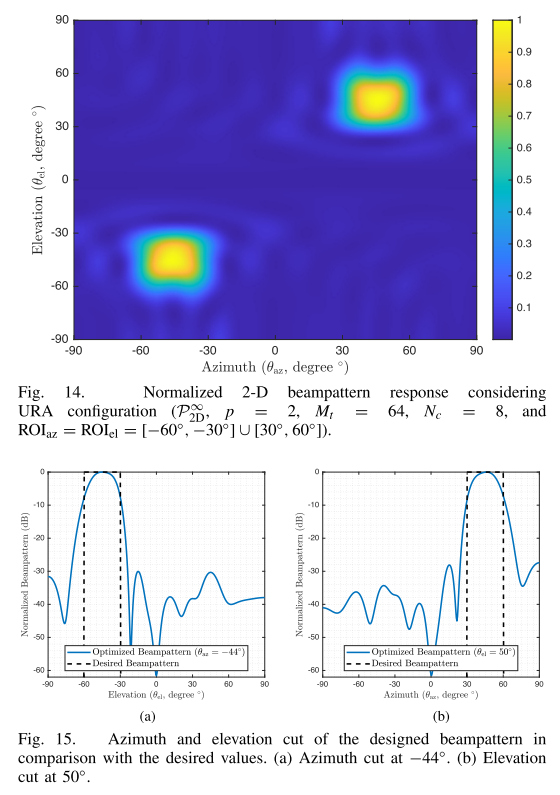
3)所提出的方法支持一系列的天线配置,包括均匀线性阵列(UWB)和均匀矩形阵列(URA),以提高雷达系统中的方向灵活性和角分辨率。
4)我们的方法包括一个有效的计算解决方案的连续相位调制的情况下,p ≥ 2。
5)我们确保我们提出的方法收敛于目标函数和参数,为优化问题建立了一个新的停止准则。
6)我们已经成功地表明,所提出的方法优于典型的全向波束图在各种汽车场景。
文章插图
结论
本文提出了一种设计用于4-D成像汽车MIMO雷达系统波束赋形的码序列的方法。我们概述了一个优化问题,该优化问题寻求通过广义的BFP范数来最小化期望波束图和设计波束图之间的距离,其中我们已经成功地解决了0 < p ≤ 1和p ≥ 2的情况下的问题。这个问题是用BSUM方法解决的。我们提出了一个基于FFT的算法的离散相位约束,一个解决方案,可以方便地在实时应用。我们建议求解连续相位约束的四阶多项式以获得最佳连续相位,并且我们建议了具有良好精度的连续相位解的快速近似。
我们的分析证明了解决方案的收敛性,导致我们引入一个新的停止标准的优化过程。仿真结果不仅支持我们提出的方法的有效性,表现出一致的最小化的目标函数,但也表明其上级性能在汽车场景相比,典型的全向波束图。此外,所提出的方法表现出令人满意的MSE之间的设计和期望的波束方向图,肯定其良好的性能和实用性。在现实世界的场景中实现和增强这些算法的前景是巨大的,并为提高此类系统的性能带来了巨大的希望。
MATLAB仿真结果
与文章插图一致