宝可梦GO如何超越李飞飞的空间智能?150万亿参数解锁现实边界 | LeetTalk Daily...

“LeetTalk Daily”,每日科技前沿,由LeetTools AI精心筛选,为您带来最新鲜、最具洞察力的科技新闻。
在当今科技迅猛发展的时代,空间智能的概念逐渐成为研究的热点。李飞飞教授提出的空间智能,强调了计算机在理解和处理空间信息方面的能力,尤其是在增强现实(AR)和机器人技术等领域的应用。宝可梦GO团队在这一领域取得了显著进展,构建了一个名为LGM的大规模地理空间模型,利用超过150万亿参数的神经网络,成功实现了李飞飞的空间智能理念。该模型不仅能够以人类相似的方式理解空间,还能智能填补未扫描区域,推动了地理空间模型的进一步发展。

空间智能的概念与发展
李飞飞提出的空间智能概念,旨在通过机器学习和人工智能技术,使计算机能够理解和感知物理世界的空间特性。这一概念的核心在于,计算机不仅要能够识别物体,还要能够理解物体之间的空间关系和环境上下文。这种能力对于增强现实(AR)、机器人技术以及自主系统的开发至关重要。
在这一背景下,宝可梦GO团队的最新成果——大规模地理空间模型(LGM)——标志着空间智能的重大进展。LGM通过训练超过5000万个神经网络,参数规模超过150万亿,使得计算机能够以类似人类的方式理解空间。这一模型不仅能够智能地填补地球上尚未全面扫描的领域的空白,还能与全球数百万个场景相连,形成一个动态的、可交互的空间理解系统。
LGM的实现过程体现了创新和应用的结合。通过用户在宝可梦GO游戏中贡献的真实世界地点扫描数据,LGM能够不断更新和优化其空间理解能力。这种数据驱动的方法使得模型能够在不同的地理位置进行有效的定位和理解,甚至在用户未曾直接扫描的区域也能进行推断和预测。这种能力的提升,不仅为AR眼镜等可穿戴设备的应用奠定了基础,也为未来的智能城市、自动驾驶和其他智能系统的开发提供了强大的支持。
此外,LGM的成功还展示了大规模机器学习在空间智能领域的潜力。与传统的3D视觉模型不同,LGM能够捕捉到根植于特定地理位置的3D实体,并以尺度度量单位进行精确的估算。这种地理空间模型的构建,不仅是对空间智能概念的具体实现,更是对未来科技发展的重要推动力。
总之,李飞飞的空间智能概念在宝可梦GO团队的实践中得到了生动的体现,展示了如何通过先进的机器学习技术,推动科技的创新与应用。这一进展不仅为AR和机器人技术的发展提供了新的视角,也为人类与物理世界的互动方式带来了革命性的变化。
大规模地理空间模型LGM的构建
宝可梦GO团队在构建大规模地理空间模型(LGM)方面取得了显著进展,标志着空间智能的实现。该模型的核心在于其使用的技术和训练的神经网络数量,这些因素直接影响了模型的性能。
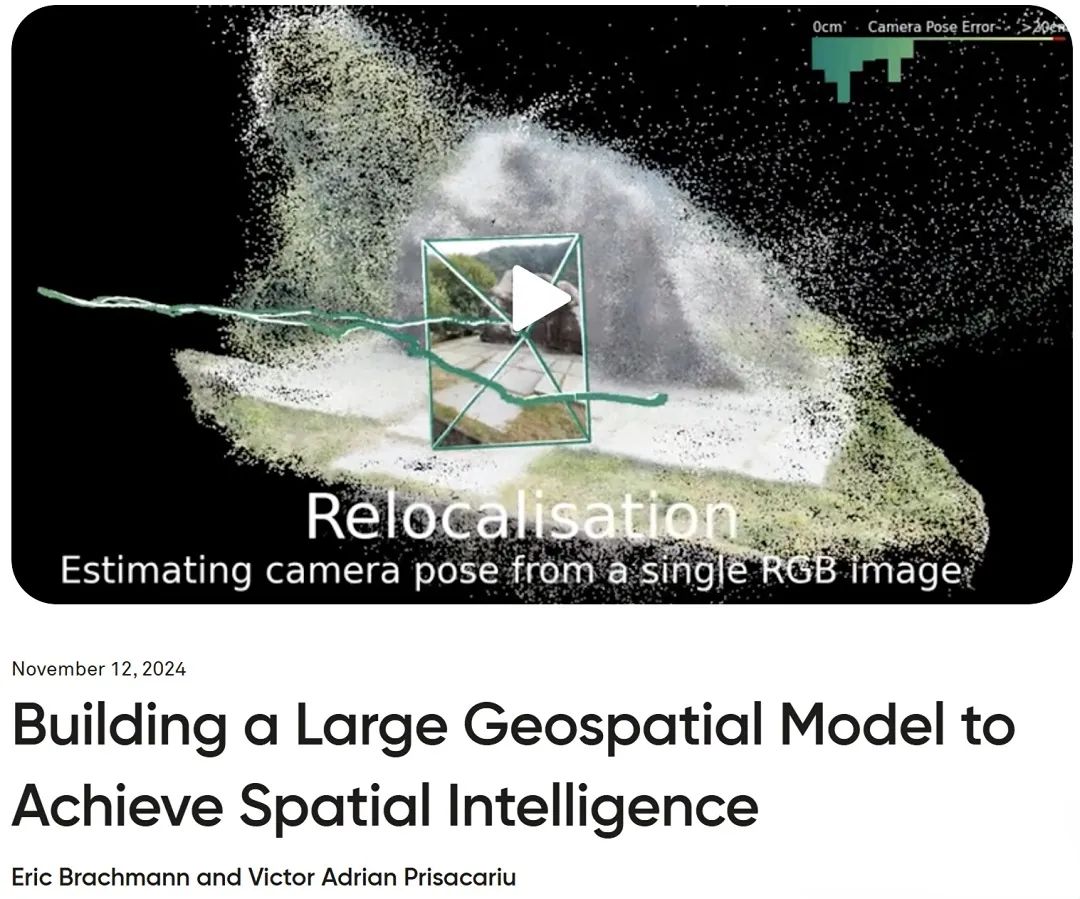
首先,LGM的构建依赖于Niantic的视觉定位系统(VPS),该系统通过用户扫描生成数据,利用数十亿张全球各地的图像,锚定在地球上的精确位置。这一过程使得计算机能够理解空间、结构和物理交互,从而实现厘米级的定位精度。团队训练了超过5000万个神经网络,这些网络的参数规模超过150万亿,赋予了模型强大的空间理解能力。
在技术层面,LGM采用了运动结构技术和神经网络来构建3D视觉地图和神经地图。这些神经模型不再使用传统的3D数据结构,而是将位置隐式编码在可学习的参数中。这种方法使得模型能够快速将数千张地图图像压缩成精简的神经表示,从而在给定一张新的查询图像时,以厘米级的精度进行定位。

此外,LGM的设计理念超越了传统的本地模型。通过全球范围内的数据共享,LGM能够提炼出分布式知识,实现本地模型之间的通信和数据共享。这种能力使得LGM能够在未见过的视点和角度下进行推断,展现出前所未有的鲁棒性。例如,即使本地模型只见过教堂的前门,LGM也能根据之前见过的数千座教堂,对教堂的背面做出明智的猜测。
总的来说,宝可梦GO团队通过大规模机器学习和神经网络的结合,成功构建了一个能够以人类类似方式理解空间的模型。这一进展不仅推动了空间智能的发展,也为AR眼镜、机器人、内容创建和自主系统等领域的应用奠定了基础。
150万亿参数模型的应用潜力
150万亿参数模型在解锁现实边界方面展现出巨大的潜力,尤其是在未被扫描区域的探索和数据分析中。随着技术的进步,尤其是大规模地理空间模型(LGM)的发展,计算机能够以类似人类的方式理解和感知空间,这为我们提供了前所未有的机会来探索那些尚未被全面扫描的区域。
通过对数十亿张全球图像的分析,LGM不仅能够理解空间的结构和物理交互,还能在不同的地理位置之间建立联系,从而实现更高层次的空间智能。这种能力使得计算机能够在未被扫描的区域进行有效的数据分析和推理,进而推动AR技术、机器人和自主系统等领域的创新。
在实际应用中,LGM能够通过用户的实时数据输入,生成高精度的三维地图。这种地图不仅仅是静态的视觉呈现,而是一个动态的、可交互的空间模型,能够实时更新并适应用户的需求。这种技术的实现,意味着我们可以在虚拟环境中进行更为复杂的操作,例如在未被详细扫描的区域进行导航和探索,甚至在这些区域中进行实时的数据分析和决策。
此外,LGM的潜力还体现在其对文化和环境信息的编码能力上。通过将几何、外观和文化信息整合到场景特征中,LGM能够为用户提供更为丰富的交互体验。这种能力不仅限于游戏和娱乐领域,还可以扩展到教育、城市规划和环境监测等多个领域,帮助人们更好地理解和利用他们周围的空间。
总之,150万亿参数模型的出现为我们解锁现实边界提供了新的视角和工具,使得未被扫描区域的探索和数据分析变得更加高效和智能。这一技术的进步将推动各个领域的创新,开启一个全新的空间智能时代。
AR技术与空间智能的结合
在宝可梦GO的应用案例中,LGM的潜力得到了充分体现。例如,团队推出的“Pokémon Playgrounds”功能允许用户在特定位置上放置宝可梦,这些数字内容能够在物理环境中持久存在,并与他人共享。这种交互方式不仅增强了用户体验,也展示了空间智能在游戏中的实际应用。
此外,LGM的成功实现也为未来的AR眼镜市场铺平了道路。随着AR技术的不断发展,空间智能将成为未来世界的操作系统,推动人们与现实世界的互动。想象一下,未来的AR眼镜能够通过LGM提供个性化推荐、导航服务,甚至回答用户的问题,这将极大地提升人们的生活质量和工作效率。
总之,宝可梦GO团队通过构建LGM,不仅实现了李飞飞的空间智能概念,还为未来科技的发展开辟了新的方向。这一创新将推动AR眼镜、机器人等领域的进步,改变人们与周围环境的互动方式,开启一个全新的数字与物理世界融合的时代。
李飞飞教授的视角与未来展望
李飞飞教授在空间智能领域的研究具有深远的影响,尤其是在她最近的专访中强调了视觉空间智能的重要性。她指出,视觉空间智能不仅是人工智能的一个基本组成部分,而且与语言智能同样根本。李教授提到,空间智能的核心在于机器如何在三维空间中感知、推理和行动,这种能力使得机器能够理解物体在空间中的位置及其相互作用。
在她的研究中,李飞飞强调了数据和计算能力在推动人工智能发展的重要性。她提到,过去十年中,计算能力的飞速增长为深度学习的突破奠定了基础,而这一点在她的ImageNet项目中得到了充分体现。通过大规模的数据集,机器学习模型能够获得前所未有的理解能力,从而在视觉识别等领域取得显著进展。
李飞飞的团队正在致力于开发一种新的空间智能模型,旨在将人工智能从传统的数据中心带入到真实的三维世界中。这一模型不仅能够理解静态场景,还能处理动态交互,预示着未来在增强现实(AR)和虚拟现实(VR)等领域的广泛应用。她认为,空间智能的实现将使得机器能够更自然地与人类互动,甚至在日常生活中提供帮助,例如通过AR设备指导用户完成复杂任务。
此外,李飞飞还提到,未来的空间智能将与大规模地理空间模型相结合,这些模型能够通过数十亿张图像和全球用户的贡献,理解和填补地理空间中的空白。这种能力不仅提升了机器的空间理解能力,也为AR眼镜、机器人和自主系统等技术的发展提供了新的可能性。
总的来说,李飞飞教授的研究展现了空间智能在未来科技中的重要性,尤其是在推动人机交互和智能系统的进步方面。她的愿景是通过解锁空间智能,推动人工智能的进一步发展,使其能够更好地服务于人类的生活和工作。
👇点击阅读原文,获取LeetTools试用申请。