镜头光学指标介绍----清晰度SFR
目录
简介
常用单位
lp/mm(line-pairs/mm)
Cycle / pixel
LW/PH(line widths/ picture height)
转换关系
MTF
MTF概念
MTF50,MTF50P
SFR的计算方法
参考资料:
简介
在镜头选型或者对比中,一般都会参考一些镜头的光学指标,产品中也会根据产品需求,选取合适的镜头,一般有清晰度指标,FOV,色差,光学畸变,焦距,光圈,镜头透过率等等。这里主要介绍清晰度指标Spatial Frequency Response(SFR)。
常用单位
lp/mm(line-pairs/mm)
每毫米线对,表示黑白两条线,常用于表示镜头分辨率的单位, 指成像平面1mm间距内能分辨开的黑白相间的线条对数。l/mm:每毫米线数,表示1条线,lp/mm=2 x l/mm。
Cycle / pixel
Cycle / pixel表示每个像素的线对或每个像素的周期,常用于表示镜头分辨率的单位。由于线对总是黑线和白线,因此可以达到的最大分辨率是1/2 LP / pix。所以如果一台相机可以解析0.4LP /像素,它将达到其理论最大分辨率的80%。这样,人们可以很容易地比较两个相机,看看他们如何利用他们拥有的像素量。
LW/PH(line widths/ picture height)
每个像高线数,常用于表示相机的摄影分辨率(是指镜头和相机的综合分辨率), 每像高最多可以分辨多少条线数 。举例:如给一个10 * 20mm的画幅, 如果纵向可以填进去1000根线, 横向可以填进去2000线,横向: 2000lw/ph, 纵向1000lw/ph。由于lw/ph在不同方向上不能保证线条数目一样, 所有测试要分横向和纵向。LP / PH,表示每个图像高度的线对,1 LW/PH=0.5 LP/PH。
转换关系
lp/mm和Cycle / pixel 之间的转换:
Cycle / pixel = p/mm * 像素大小(mm)
摄影分辨率与镜头分辨率的转换:
摄影分辨率(LW/PH)= 感光器高度(mm) x 2 x 镜头分辨率(lp/mm)
镜头分辨率与像素的转换:
像素数(P)= 感光元密度(2 x lp/mm)x 感光器高度(mm) x 感光元密度(2 x lp/mm)x 感光器宽度(mm)。
已知镜头的分辨率值为125lp/mm, 感光器尺寸是 1/2"(6.4*4.8mm),需要配多少像素的感光器才能发挥镜头成像水平?
感光元密度为250pixel/mm( 2倍lp/mm ), 像素数:P=(6.4x250) x (4.8x250)=1920000 pixel
(感光元密度:根据纳奎斯特采样定理,一个感光元对应一条白线或黑线)
反之:已知200万像素摄像机(像素数为:1600x1200=1920000),感光器尺寸是 1/2"(6.4*4.8mm),求相配的镜头分辨率 ?
— 水平像素密度:1600/6.4=250pixel/mm,垂直像素密度:250pixel/mm,镜头分辨率:125lp/mm( 若水平或垂直像素密度不等,应参考密度高的)。
已知sensor的像素尺寸为4um,那么所对应镜头分辨率是多少?
所选镜头的极限分辨率(白线或黑线线宽)也应该是:4um,一对黑白线的宽度:2 x 0.004mm,镜头的分辨率就是1/(2x0.004)=125lp/mm。对应的cycle pixel = 125/lp * 0.004mm=0.5cycle pixel。
镜头的清晰度要好,除了lp/mm或者cycle/pixel高之外,还需要考虑感光器尺寸。
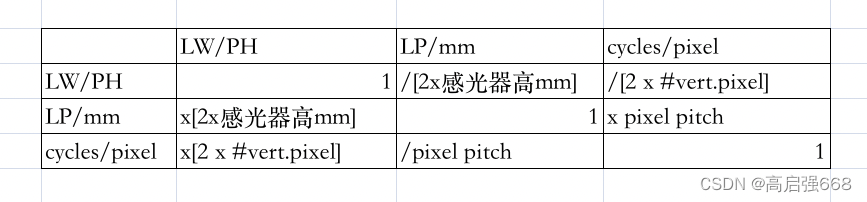
转换关系汇总如下:
MTF
MTF概念
MTF算法是分析镜头解像能力的算法,其全称是Modulation Transfer Function(调制传递函数)。为了理解这个,首先需要知道什么是调制Modulation。
Modulation类似于对比度的概念,其数学表达公式如下:
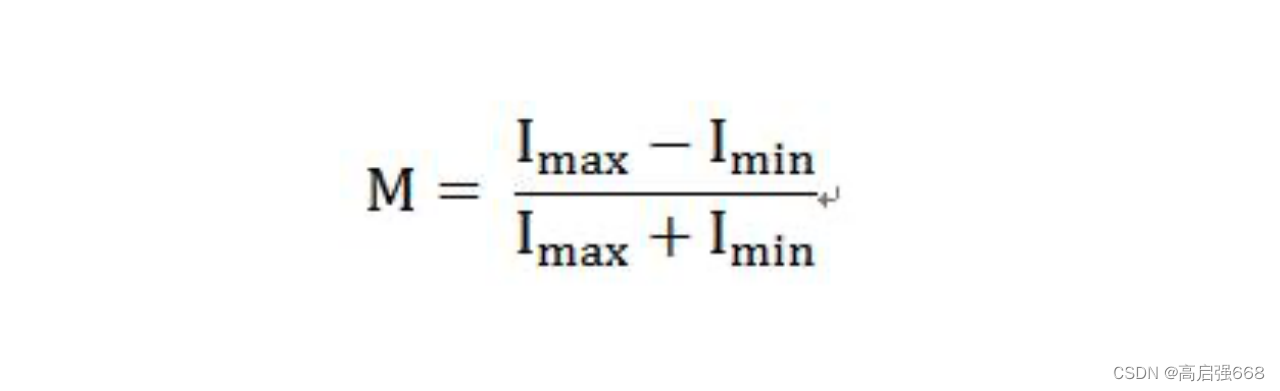
它表示的是亮度最大值和亮度最小值的差值除以它们的和。如果在一张图像中,Imax = 255,Imin=10,那么M = 0.9245。而对比度则是亮度最大值除以亮度最小值,在这里等于25.5.
可以这样理解: Modulation是归一化之后的对比度。
然而,在相机拍照的过程中,实际景象的Mi与拍摄得到图像的Mo并不是一致的。对此,有这样的传递函数 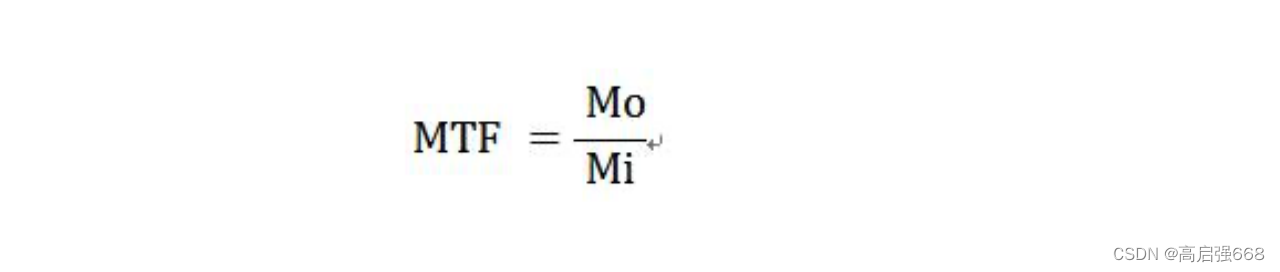
它表示的是经过相机拍摄后对比度的变化。如果MTF=1,那表示成像的质量非常的高,基本上无损传输了。它衡量的是该镜头将原图像转化到具体成像之间的传递能力。
而在实际测试的过程中,通常都是采用的如下所示的线对来分析计算。
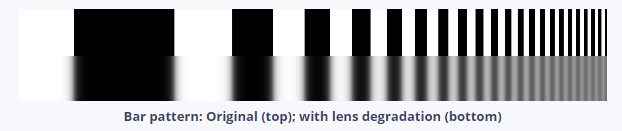
在上图中,上面的是原图像,下面表示相机拍摄得到的图像。可以看出线对的边缘经过镜头之后明显变得模糊,并且线对越密越模糊,相应的MTF也就越低。
而MTF通常跟空间频率的关系比较密切。空间频率指的是线对的密度,如果单位为cycle/pixel,则是表示在一个像素里有多少个线对,黑白线对为一个周期。而SFR(spatial frequency response)表示空间频率响应,表示的也是相机的解像能力,在这个层面上,MTF与SFR是一样的意思。
MTF50,MTF50P
在表示相机图像解析力时,通常采用MTF50或者MTF50P。
MTF50表示的是MTF为最大值的50%(即MTF=0.5)时,对应的空间频率。
由于在图像拍摄过程中,图像处理模块有可能会对图像进行锐利化,对MTF的数值有所影响,而为了避免这样的影响,则规定MTF50P是相机拍摄后的图像的MTF最大值的50%对应的空间频率。
SFR的计算方法
这里主要参考ISO 12233标准所描述的SFR算法过程,详见《ISO 12233-2000 Camera resolution measurement》中6.3 Saptial frequency response。
参考资料:
分辨率单位及换算,LW / PH、LP / mm、L / mm、Cycles / mm、Cycles / pixel、LP / PH_jgw2008的博客-CSDN博客
【图像处理】SFR算法详解1_摄像头sfr算法原理_Denny#的博客-CSDN博客
分辨率单位、换算及镜头与感光器像素的匹配_lw/ph是什么单位_木 东的博客-CSDN博客
图像质量标准ISO122332014,ISO122332017eSFRMTF - 道客巴巴
Sharpness: What is it and How it is Measured | Imatest
ISO 12233:2023 - Photography — Electronic still picture imaging — Resolution and spatial frequency responses