Fast R-CNN
目录
1. 关于 R-CNN 的缺点
2. Fast R-CNN
3. Fast R-CNN 算法的流程
3.1 CNN 特征提取
3.2 ROI pooling
3.3 Fast R-CNN 的输出
3.4 损失函数
4. Fast R-CNN的不足
1. 关于 R-CNN 的缺点
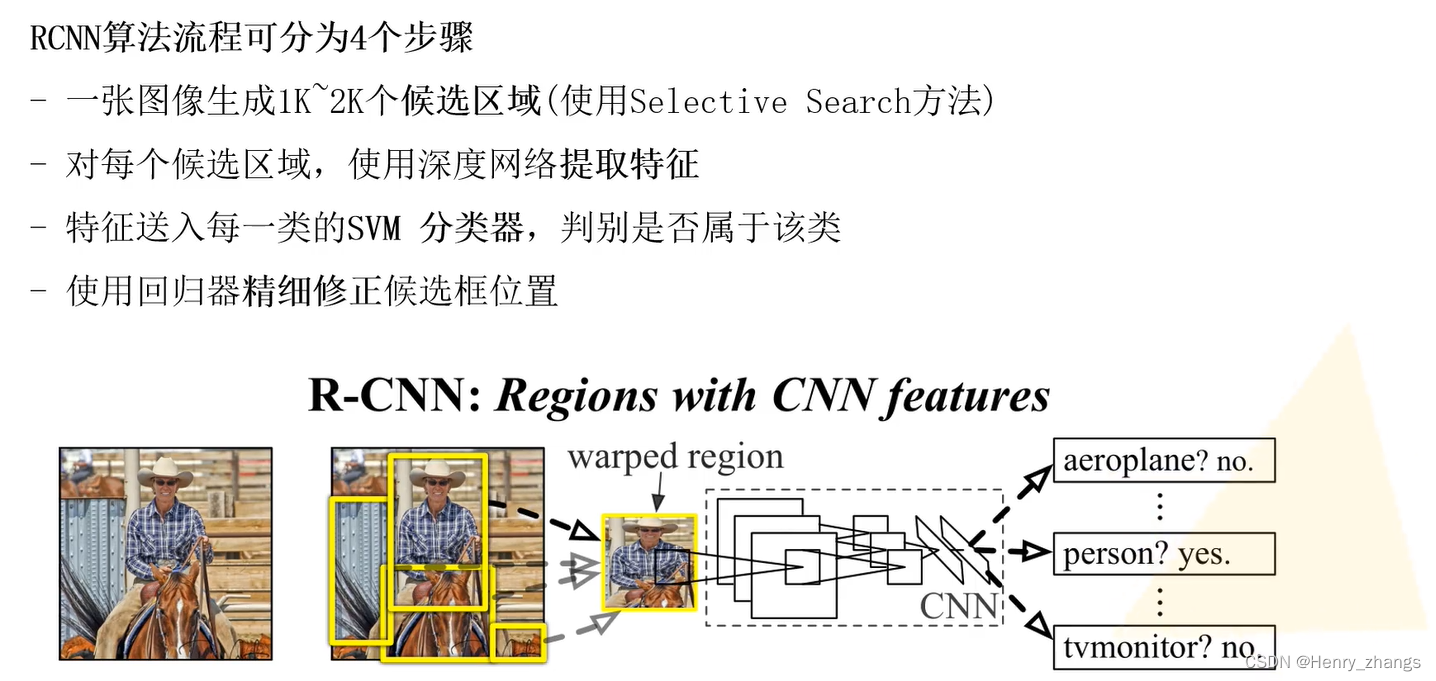
RCNN算法流程如下
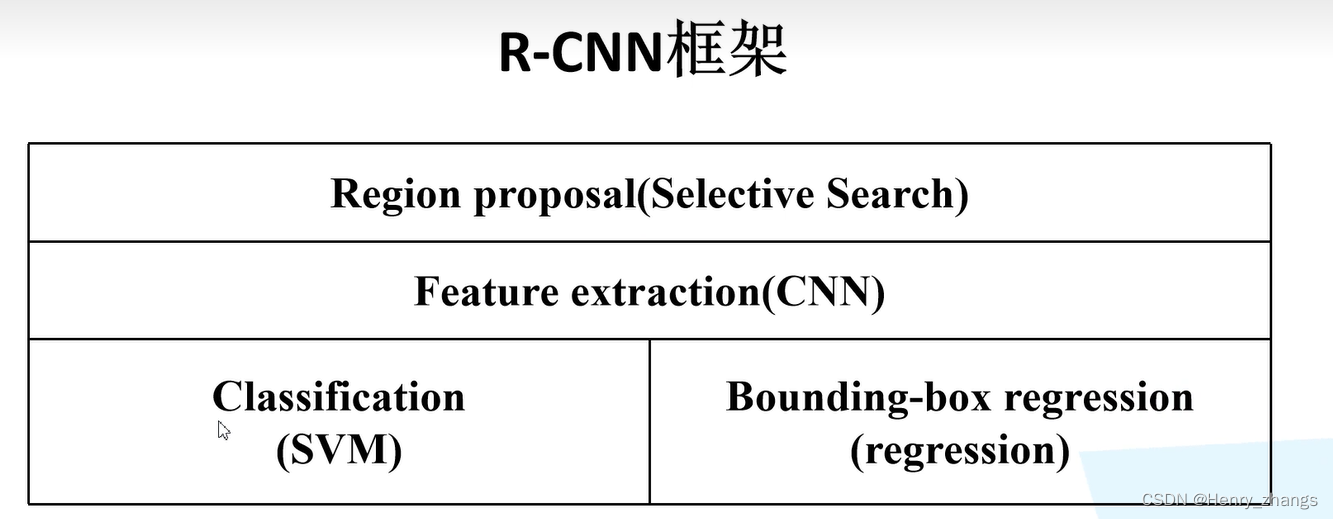
RCNN算法分为四个步骤:
- SS 算法生成2000个候选框
- 将2000个候选框送入CNN特征提取网络,生成2000*4096个特征向量
- 将2000*4096特征送入SVM分类器进行训练分类
- 通过回归器对最后的候选框进行微调
从上述可以发现,RCNN的训练是多阶段的:CNN网络+SVM分类器+边界框回归器
这样的训练在时间和空间上都是昂贵的
时间上,例如CNN特征提取需要SS算法产生2000个候选框才能工作,无法并行化
空间上,例如SVM需要的输入是CNN产生的2000*4096的特征,需要保存这些,所以浪费磁盘内存
2. Fast R-CNN
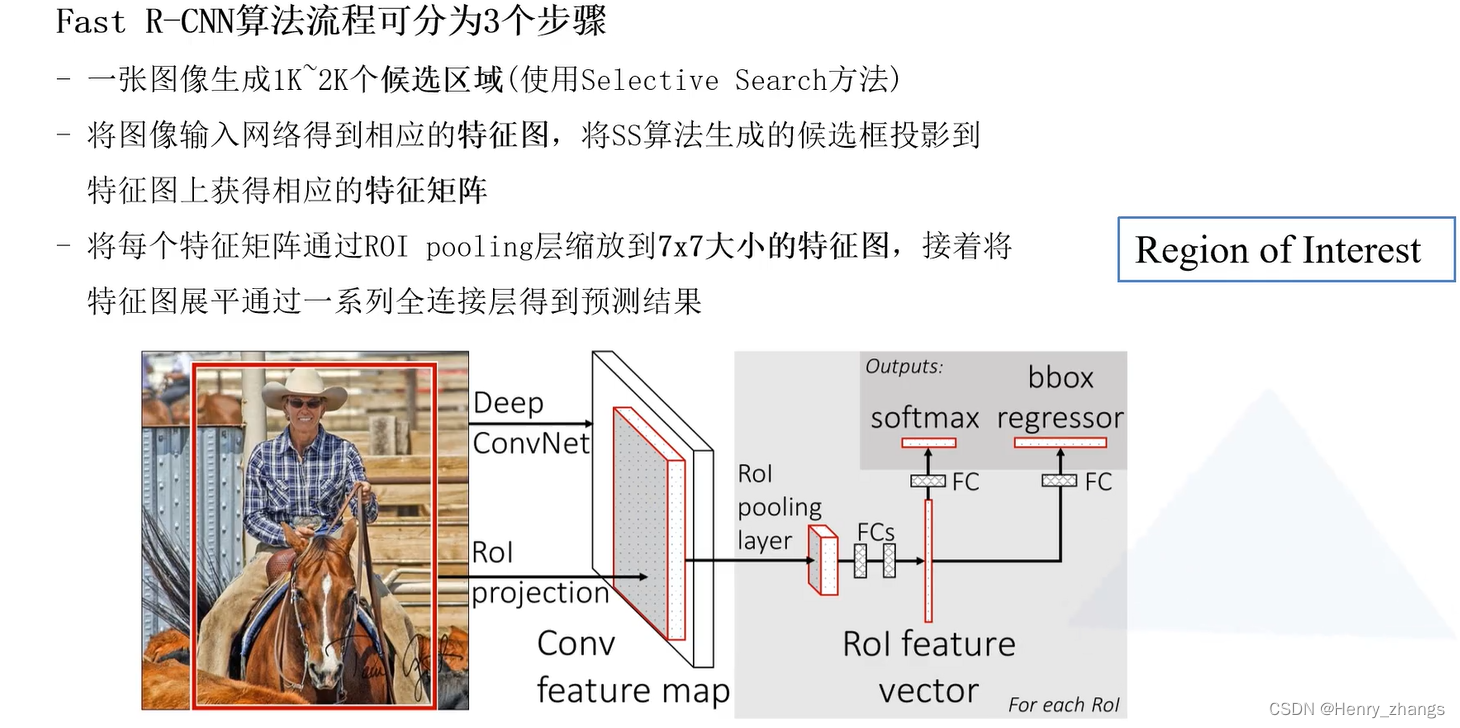
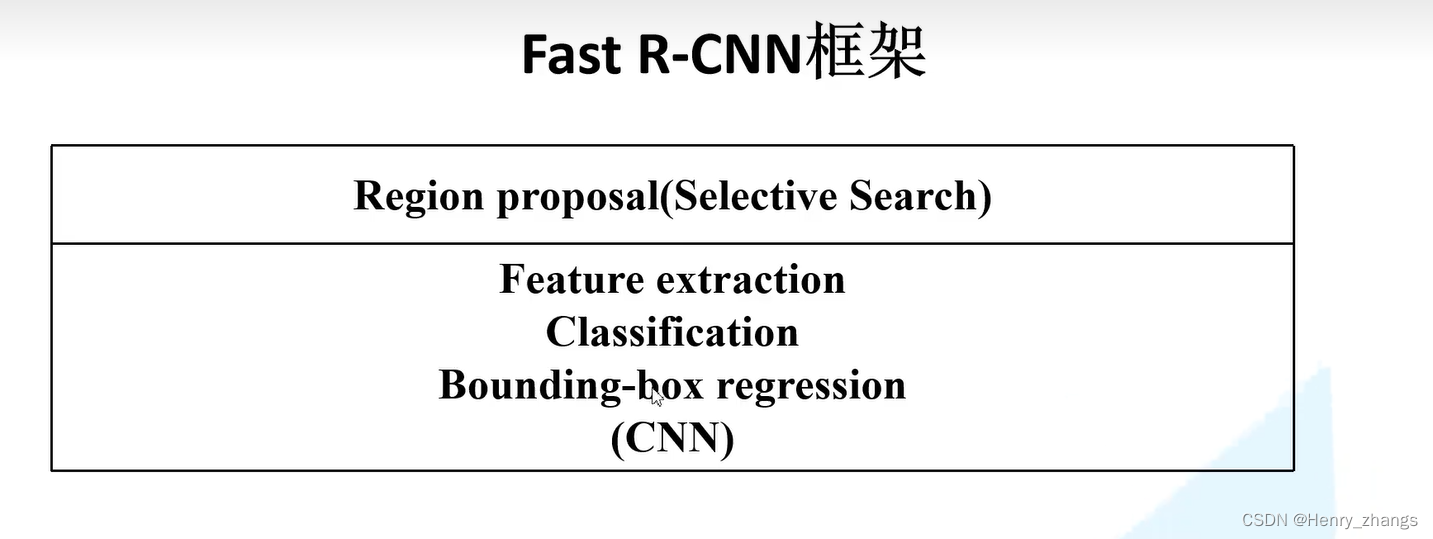
Fast R-CNN 算法分为三个阶段:
首先,通过SS算法生成候选框。
然后,Fast R-CNN网络的输入是:整个图像+候选框。经过CNN网络提取特征,将候选框映射到CNN提取的特征上。
最后,将特征矩阵通过ROI pooling缩放成7*7大小的特征图,所以这里图像的输入是不需要固定大小的
Fast R-CNN 最后的输出有两个:分类的类别+边界框回归器
RCNN的分类SVM和回归器是单独训练的,而Fast R-CNN是一起训练的
3. Fast R-CNN 算法的流程
Fast R-CNN 算法流程,其中的SS候选框生成和RCNN一样,这里不再介绍
3.1 CNN 特征提取
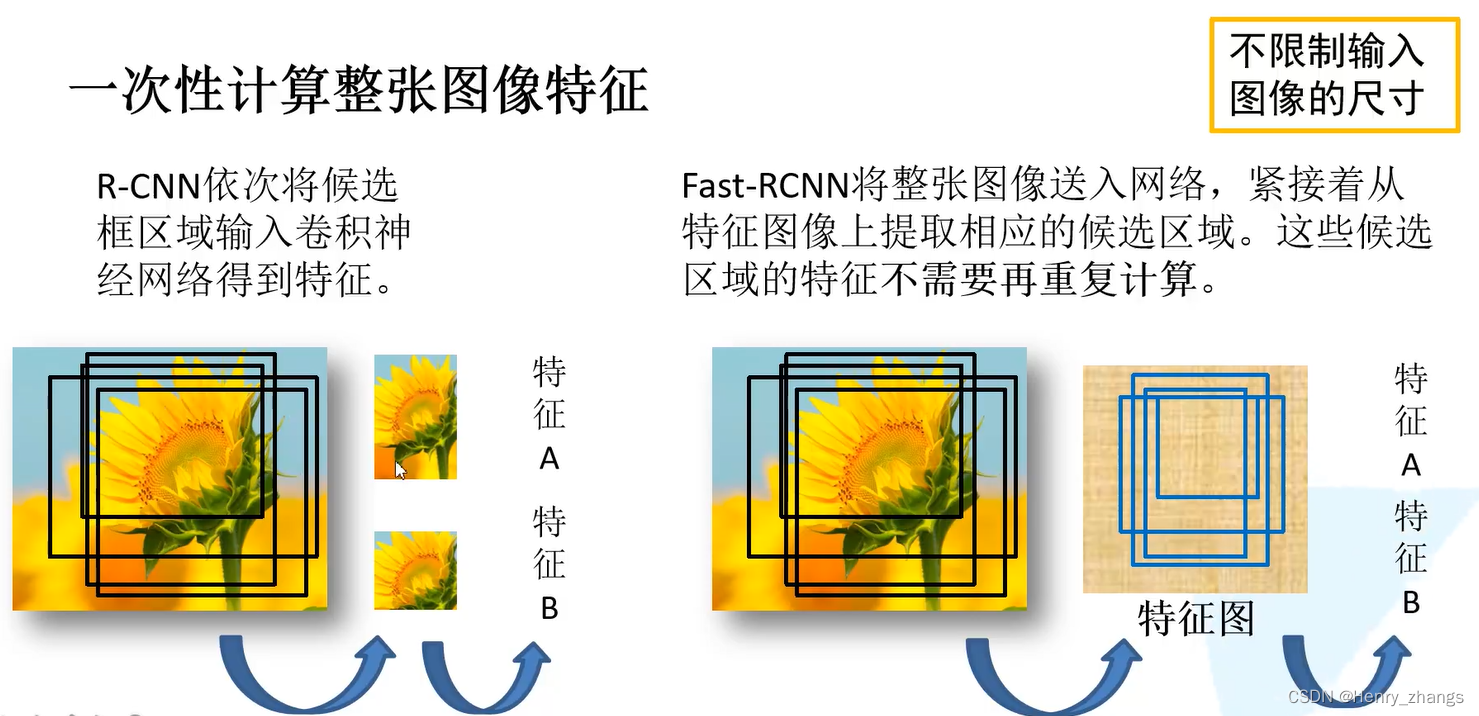
Fast R-CNN 的特征提取CNN网络是将原图和候选框作为输入
CNN网络只需要在原图进行特征提取,然后通过候选框和原图的位置关系映射到CNN提取的特征上
R-CNN是将2000个候选框全部送入CNN网络,不仅复杂,且较多重复的图像被运算
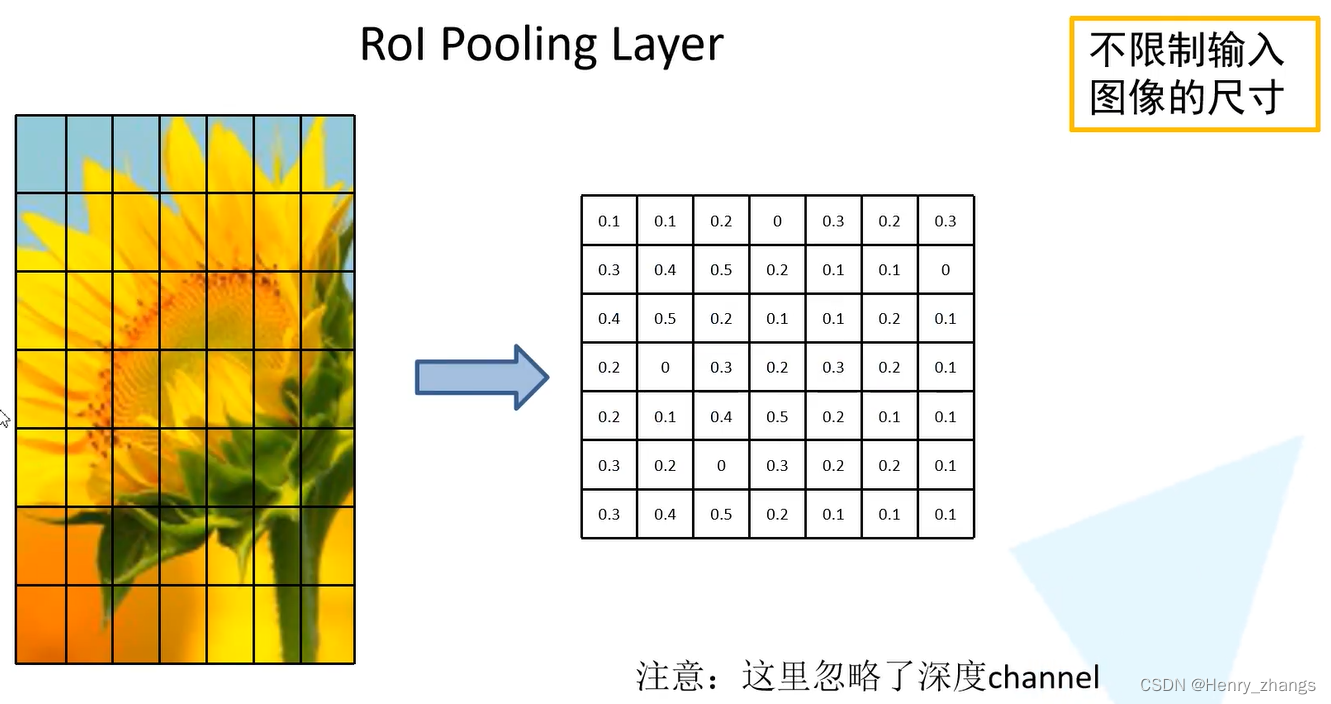
3.2 ROI pooling
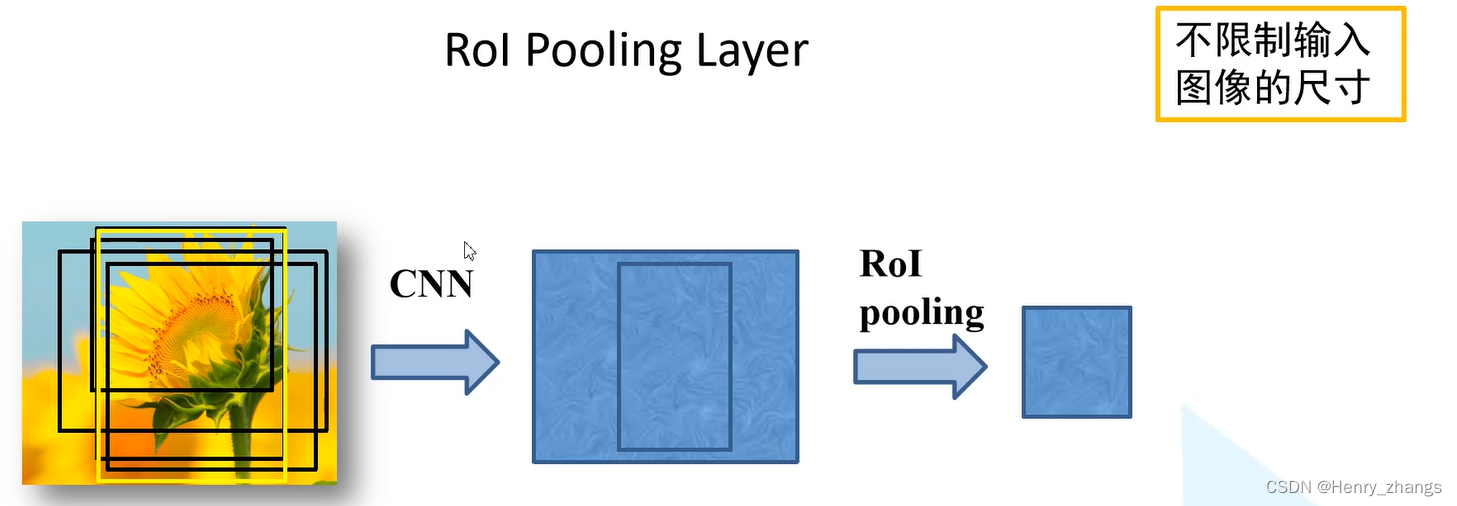
ROI Pooling是将CNN提取的特征划分为7*7大小的区域,每一个区域作最大池化下采样
这样输入图像的尺寸就不需要限制了
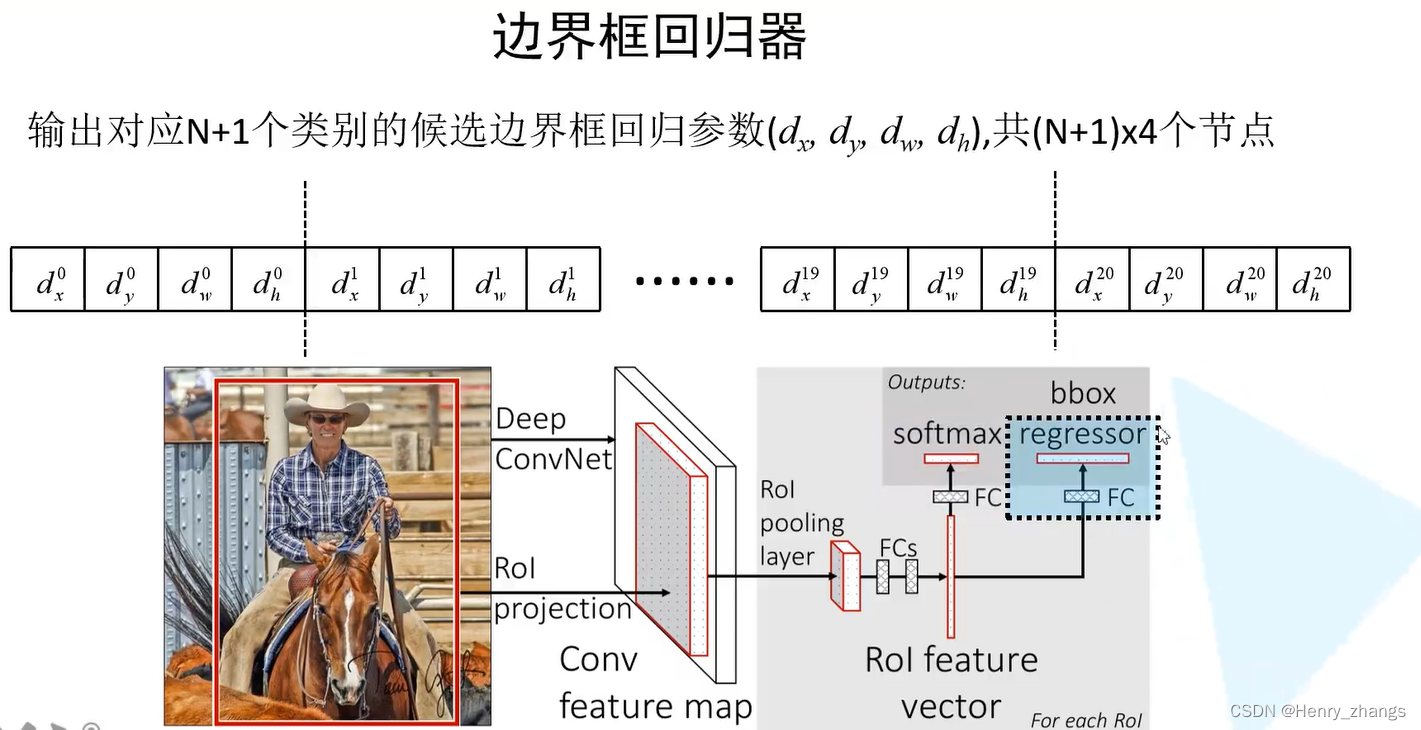
3.3 Fast R-CNN 的输出
Fast R-CNN 输出有两个:分类的类别+边界框回归器
如下是fc经过softmax的类别分类

如下为边界框回归器

3.4 损失函数
损失函数:分类损失+边界框回归器损失
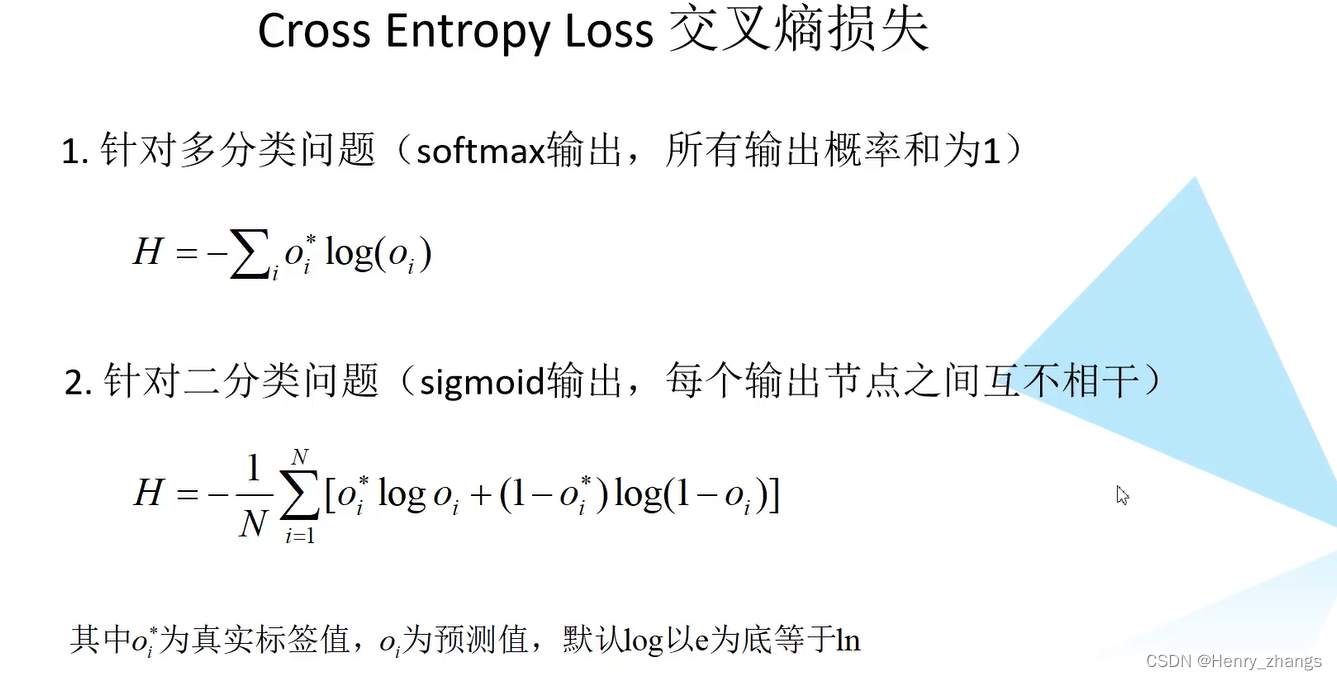
其中,分类损失就是多分类任务的损失,采用交叉熵损失

边界框回归器损失:其中艾佛森括号u>=1 为1,否则为0
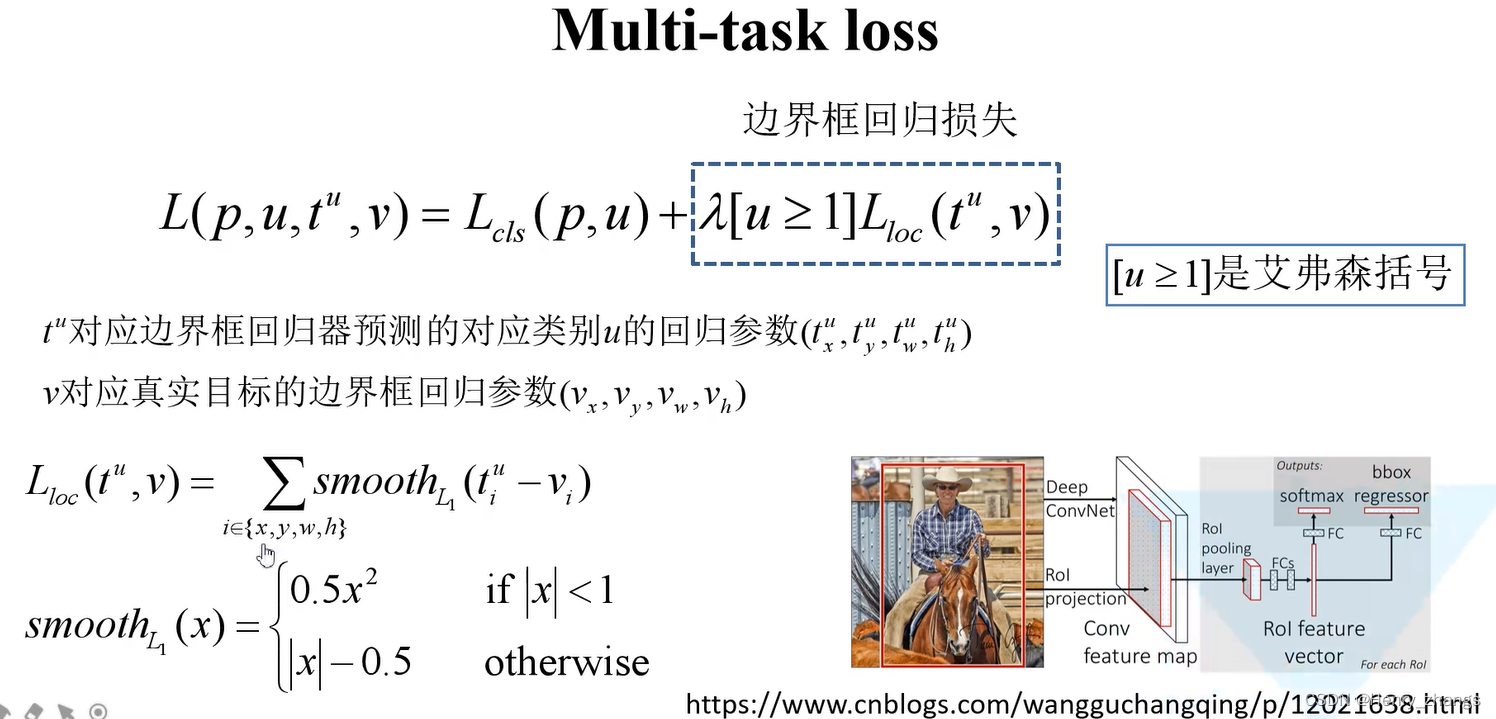
smooth是为了防止梯度消失或者梯度爆炸
当预测框与真实框差别过大时,梯度值不会太大 (+1,-1)
当预测框与真实框差别过小时,梯度值足够小,有利于反向传播 (x)
4. Fast R-CNN的不足
Fast R-CNN 分为两个阶段,虽然大幅度提升了速度,但是SS算法生成的候选框运算也很长(2s左右),而后面的分类+特征提取的运行时间很短(0.1s的数量级)
所以SS算法成为了Fast R-CNN的短板