LIN节点结构和主要技术特点
文章目录
- 前言
- 一、CAN/LIN总线的区别
- 二、LIN节点结构
- 三、主要技术特点
- 1.单线连接
- 2.低成本
- 3.低传输速率。小于20kb/s
- 4.采用NRZ编码
- 5.单主/多从媒体访问、无需仲裁。
- 6.同步机制简单
- 7.通信确定性。
- 8.报文的数据长度可变。
- 9.采用奇偶校验和求和校验相结合的双重校验机制。
前言
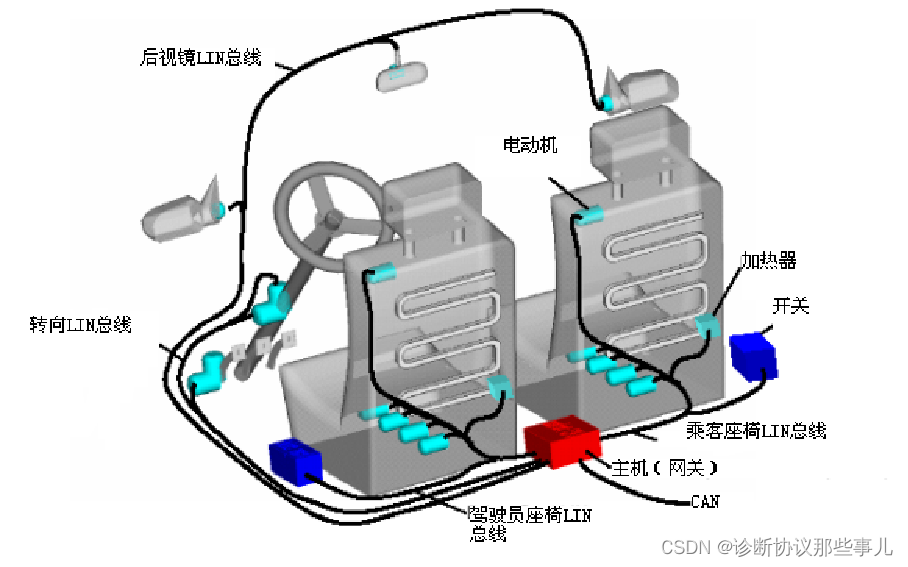
LIN总线是针对汽车分布式电子系统而定义的一种低成本的串行通讯网络,是对控制器区域网络(CAN)等其它汽车多路网络的一种补充,适用于对网络的带宽、性能或容错功能没有过高要求的应用。LIN总线是基于SCI(UART)数据格式,采用单主控制器/多从设备的模式,是UART中的一种特殊情况。
一、CAN/LIN总线的区别
由于LIN网络在汽车中一般不独立存在,通常会与上层CAN网络相连,形成CAN-LIN网关节点。
二、LIN节点结构
LIN接口由两部分组成:协议控制器、线路接口
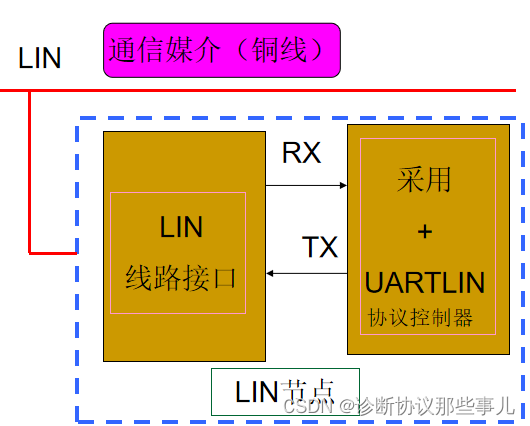
协议控制器集成在微控制器中的一个标准UART上实现,微控制器软件负责管理LIN协议,实现以下功能:
(1)发送/接收8位字节;
(2)构成请求帧,接收为应帧;
(3)发送帧
线路接口:
(1)负责将LIN总线的信号翻译成无干扰的RX信号传入LIN协议控制器;
(2)或将协议控制器的RX信号进行翻译传入LIN总线
三、主要技术特点
1.单线连接
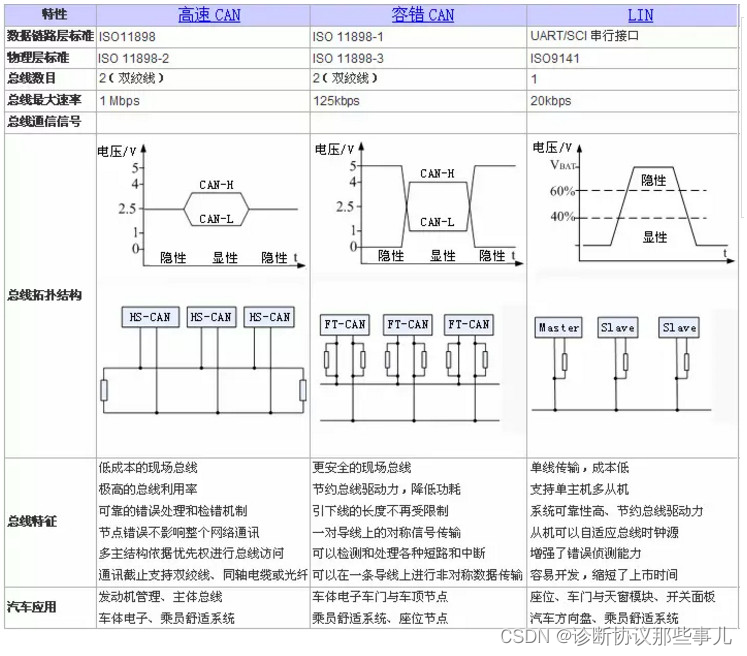
物理层采用单线连接,两个电控单元间的最大传输距离为40m
2.低成本
①LIN是基于SCI/UART( 通用异步收发接口的单总线串行通信)协议;
②目前几乎所有的微控制器芯片上都有SCI/UART接口。
3.低传输速率。小于20kb/s
CAN通常为500kb/s,最低的也达到100kb/s。
LIN传输速率最高可达20kbps,通常使用19200b/s或9600b/s的速率
4.采用NRZ编码
数据链路层采用NRZ (Not Return Zero)非归零编码方式,电平分为隐性电平(‘1’)和显性电平(‘0’)
5.单主/多从媒体访问、无需仲裁。
在总线拓扑结构的LIN网络中,由主节点控制对传输介质的访问,从节点只是应答主节点的命令。不需要仲裁和冲突管理机制。
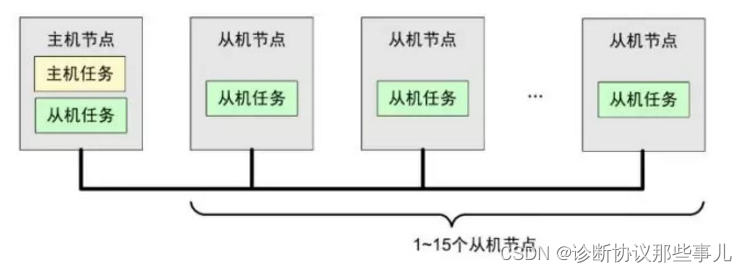
LIN总线的网络节点数不能超过16,否则,节点增加将会减少网络阻抗,导致环境条件变差。每增加一个节点,就会降低3%的阻抗
主机节点:控制网络中各节点通信的节点
一个LIN网络上的通讯总是由主机任务所发起的,在主机节点上可执行主机任务和从机任务,可控制整个总线网络和协议;
主机任务负责:
- 在主节点上运行的,用于控制总线上所有的通信,负责报文的进度表、发送报文头的任务称为主任务。
- 常见主任务:如定义传输速率,发送同步时间间隔、同步场、标识符ID场,监控并通过检查校验和(check sum)验证数据的有效性。
- 接收从机节点发出的总线唤醒命令
从机节点:是总线上的2-16个成员,它们在主节点发送适当的ID后接收或发送数据
从机节点从事的任务都称为从机任务;但主机节点也会执行从机任务
从机任务不能直接向总线发送数据,需要接受到主节点发送的帧头后,根据帧头所包含的信息来判断:
- 发送应答
- 接收应答
- 既不接收也不应答
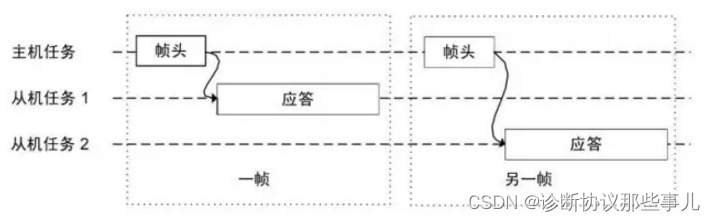
LIN协议是一主多从结构,通信只能由主机节点中的主机任务发起,一个完整的LIN报文帧的传输是由主机任务和从机任务共同实现的,主机任务发送“报头”,从机任务发送或接收“响应”。
6.同步机制简单
LIN通信中的从节点采用简单的自我同步机制(不需要晶体或陶瓷共鸣器)。
主节点在报文帧的头部发送同步间隙,标记报文帧的开始。
从节点根据此间隙与总线同步,无需专门的时钟同步装置,降低硬件成本。
7.通信确定性。
主节点控制整个网络的通信,控制不同节点的传输时间;
每个报文帧的长度是预知的;
采用调度表,可保证信号的周期性传输、保证总线不会出现超负载现象
8.报文的数据长度可变。
LIN应答帧报文的数据域长度可在0~8个字节之间变化,便于不同任务的通信应用。