kruskal重构树
一,定义
kruskal是求最小生成树的一种算法。最小生成树
但是这种结合并查集的特殊方法给了他许多特殊的性质。可以用于解决树上瓶颈边权之类的问题
结合这种算法而诞生的就是——kruskal重构树
二,建树思路及其性质
kruskal求最小生成树是将边权小的边先连起来。而重构树则是同理,他把当前最小边抽象为一个虚点(虚点的值为该边权值),然后把这条边对应的两个不同集合视为左右儿子,将集合与该虚点建边
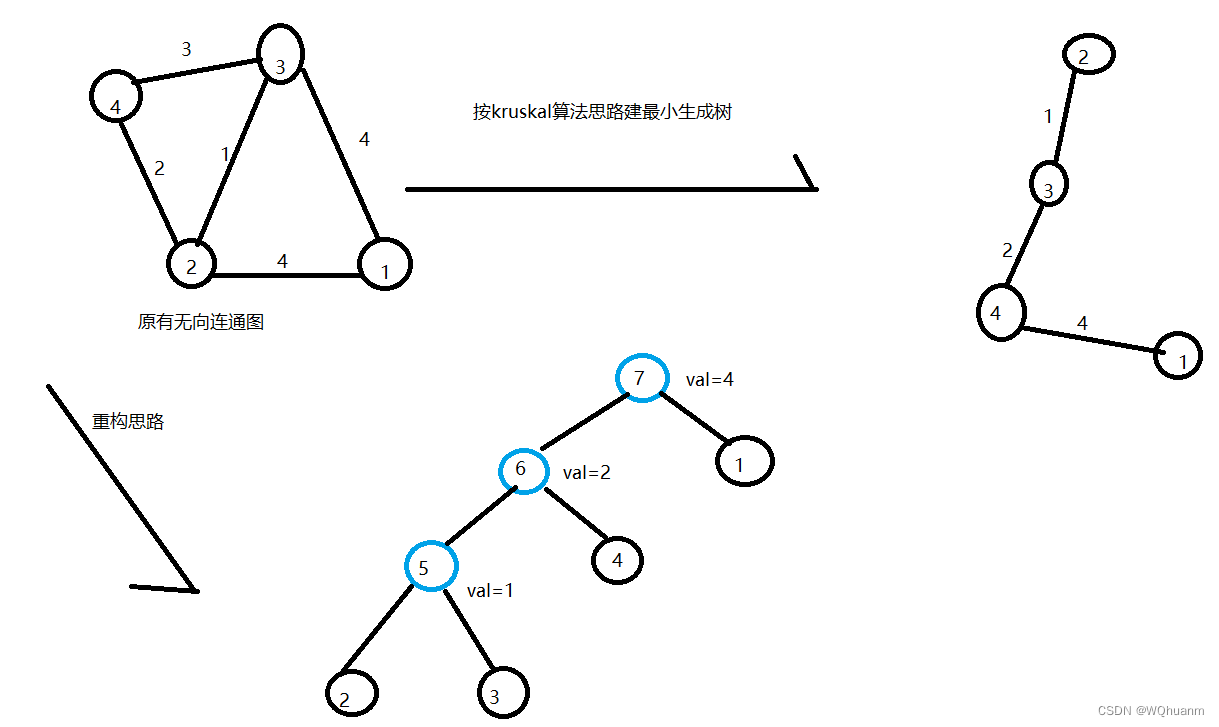
建树后我们很清晰地发现它有如下性质
- 是一颗二叉树
- 虚点有n-1个,且值随着树的建立不断变大(因为是从小边建到大边嘛)
- 父节点都是虚点,叶子节点都是原来图中的点
- 如果我们从图中任意x点到y点,那么他们路过的最大边权边就是他们的重构树lca虚点val值
- 换句话说:原图中x到y的所有简单路径中最大边权的最小值是val[lca(x,y)](因为所有路径中,每条边都最小的肯定是最小生成树的,那么最小中的最大边权也肯定是所有路径中最大边权中最小的)==最小生成树上两个点之间的简单路径上的最大值= Kruskal 重构树上两点之间的 LCA 的权值
例题一:P1967 [NOIP2013 提高组] 货车运输
思路:如果我们建最大生成树,那么lca(x,y)就是所有路径能通过的最小边权的最大值
#include <bits/stdc++.h>
using namespace std;
#define ll long long
#define endl "\n"
#define int long long
#define endll endl<<endl
typedef unsigned long long ull;
typedef pair<int, int> pii;
typedef pair<long long, long long> pll;
//---------------------------------------------------------------------------------------------------------------------//
//---------------------------------------------------------------------------------------------------------------------//
//double 型memset最大127,最小128
const int INF = 0x3f3f3f3f; //int型的INF
const ll llINF = 0x3f3f3f3f3f3f3f3f;//ll型的llINF
const int N = 2e5 + 10;
struct node
{
int u,v,w;
bool operator<(const node&k)const
{
return w>k.w;
}
} b[N<<1];
vector<int>edge[N<<1];
int fa[N],val[N<<1],dep[N],pre[N][32];
int find(int x)//并查集
{
if(fa[x]!=x)fa[x]=find(fa[x]);
return fa[x];
}
void dfs(int u,int f)//遍历重构树建立深度与预处理lca
{
dep[u]=dep[f]+1;
pre[u][0]=f;
for(int i=1; i<=20; ++i)pre[u][i]=pre[pre[u][i-1]][i-1];
for(auto v:edge[u])if(v!=f)dfs(v,u);
}
int LCA(int u,int v)
{
if(dep[u]<dep[v])swap(u,v);
if(dep[u]>dep[v])
{
int k=log2(dep[u]-dep[v]);
for(int i=k; i>=0; --i)if(dep[pre[u][i]]>=dep[v])u=pre[u][i];
}
if(u==v)return u;
int k=log2(dep[u]);
for(int i=k; i>=0; --i)if(pre[u][i]!=pre[v][i])u=pre[u][i],v=pre[v][i];
return pre[u][0];
}
void mysolve()
{
int n,m;
cin>>n>>m;
for(int i=1; i<=2*n; ++i)fa[i]=i;
for(int i=1; i<=m; ++i)cin>>b[i].u>>b[i].v>>b[i].w;
sort(b+1,b+1+m);
int cnt=n;
for(int i=1; i<=m; ++i)//重构
{
int fu=find(b[i].u),fv=find(b[i].v);
if(fu!=fv)
{
val[++cnt]=b[i].w;
fa[fu]=fa[fv]=cnt;
edge[cnt].push_back(fu),edge[cnt].push_back(fv);
}
}
for(int i=cnt; i>n; --i)if(fa[i]==i)dfs(i,i);//可能是森林
int q,x,y;
cin>>q;
while(q--)
{
cin>>x>>y;
if(find(x)!=find(y))cout<<-1<<endl;
else cout<<val[LCA(x,y)]<<endl;
}
}
int32_t main()
{
std::ios::sync_with_stdio(0), cin.tie(0), cout.tie(0);
ll t=1;
//cin >> t;
while (t--)
{
mysolve();
}
system("pause");
return 0;
}例题二:P4768 [NOI2018] 归程
思路:
- 首先,我们容易想到,每次询问,只需要开车开到能靠近家(1点)位置,剩下走路即可
- 我们询问可以有logq的复杂度
- 那么我们如果先用dijksta预处理每个点到家的最短距离,然后我们重构树不是每个虚点子代的点表示只要你这个虚点我能来(我们建最大生成树),那么你的子节点我就能到达,所以这个虚点可以存储子树集合到达家的最小值。
- 那么我们每次 每次询问v点,尽可能跳到最大的祖先,剩下不行距离就是该祖先点存储的子树中到达家的最小距离。(能通过虚点说明子树是可以任意通过的)
#include <bits/stdc++.h>
using namespace std;
#define ll long long
#define endl "\n"
typedef pair<int, int> pii;
const int INF = 0x3f3f3f3f; //int型的INF
const ll llINF = 0x3f3f3f3f3f3f3f3f;//ll型的llINF
const int N = 1e6 + 10;
struct node//kruskal的海拔
{
int u,v,w;
bool operator<(const node&k)const
{
return w>k.w;
}
} b[N];
struct node1//最短路
{
int next,to,w;
} edge[N];
int fa[N],pre[N][32],val[N],dis[N],head[N],num,cnt;
int dep[N];
vector<int>eg[N];//重构树的边
void add(int u,int v,int w)
{
edge[++num].next=head[u];
edge[num].to=v;
edge[num].w=w;
head[u]=num;
}
void init(int n)
{
for(int i=1; i<=2*n; ++i)fa[i]=i,fa[n+i]=n+i,eg[i].clear(),head[i]=0;//注意,重构树建立后点变成两遍,所以开空间要开两倍,初始化也要
num=0,cnt=n;
}
int find(int x)
{
if(fa[x]!=x)fa[x]=find(fa[x]);
return fa[x];
}
void dijkstra(int n)
{
for(int i=1; i<=2*n; ++i)dis[i]=INF;//2n个点,包含虚点,跑dij不会碰到虚点(都没出生呢),一开始虚点显然离终点无限远
dis[1]=0;
priority_queue<pii,vector<pii>,greater<pii>>q;
q.push({dis[1],1});
while(!q.empty())
{
int u=q.top().second;
q.pop();
for(int i=head[u]; i; i=edge[i].next)
{
int v=edge[i].to,w=edge[i].w;
if(dis[v]>dis[u]+w)
{
dis[v]=dis[u]+w;
q.push({dis[v],v});
}
}
}
}
void kruskal(int n,int m)
{
sort(b+1,b+1+m);
cnt=n;
for(int i=1; i<=m; ++i)
{
int fu=find(b[i].u),fv=find(b[i].v);
if(fu!=fv)
{
val[++cnt]=b[i].w;
fa[fu]=fa[fv]=cnt;
eg[cnt].push_back(fu),eg[cnt].push_back(fv);
}
}
}
void dfs(int u,int f)
{
dep[u]=dep[f]+1;
pre[u][0]=f;
for(int i=1; i<=20; ++i)pre[u][i]=pre[pre[u][i-1]][i-1];
for(auto v:eg[u])if(v!=f)
{
dfs(v,u);
dis[u]=min(dis[v],dis[u]);//存储虚点的子树的最小距离
}
}
void mysolve()
{
int n,m;
cin>>n>>m;
init(n);
int x,y,d,w;
for(int i=1; i<=m; ++i)
{
cin>>x>>y>>d>>w;
add(x,y,d),add(y,x,d);
b[i].u=x,b[i].v=y,b[i].w=w;
}
dijkstra(n);
kruskal(n,m);
dfs(cnt,0);
int q,k,s;
cin>>q>>k>>s;
int v,p,lantans=0;
while(q--)
{
cin>>v>>p;
v=(v+k*lantans-1)%n+1;
p=(p+k*lantans)%(s+1);
int h=log2(dep[v]);
for(int i=h; i>=0; --i)
if(dep[pre[v][i]]&&val[pre[v][i]]>p)v=pre[v][i];
cout<<(lantans=dis[v])<<endl;
}
}
int32_t main()
{
std::ios::sync_with_stdio(0), cin.tie(0), cout.tie(0);
ll t=1;
cin >> t;
while (t--)
{
mysolve();
}
system("pause");
return 0;
}