全志T113-S3 裸机SMHC eMMC读写问题记录
由于全志的资料实在太少,很多只能通过很长时间测试才能知道问题,目前还没有实现时钟初始化,只使用了默认的24MHz时钟,测试eMMC读写过程中遇到2个问题;
问题1:读取扇区的时候,会遇到数据停止位错误,只能屏蔽掉停止位错误这个检测,并不会影响数据读取。
static bool wait_done(SMHC_CH_Type ch, smhc_data_t* pData, u32 timeout_msecs, u32 flag, bool dma)
{
SMHC_TypeDef* pSMHCx;
u32 status;
u32 done = 0;
pSMHCx = (SMHC_TypeDef*)sg_SMHCx[ch];
if (timeout_msecs < 1) timeout_msecs = 1;
INFO_S("SMHC: wait for flag 0x%x\r\n", flag);
pSMHCx->RINTSTS = SMHC_RINT_END_BIT_ERROR; //清除传输结束错误状态,传输过程中会产生传输结束位错误状态==不检查停止位问题,停止位一直会报错
do
{
status = pSMHCx->RINTSTS;
INFO_S("pSMHCx->RINTSTS:0x%X\r\n", status);
if (timeout_msecs == 0)
{
INFO_S("SMHC: wait timeout %x status %x flag %x\r\n", status & SMHC_RINT_INTERRUPT_ERROR_BIT, status,
flag);
return FALSE;
}
else if ((status & SMHC_RINT_INTERRUPT_ERROR_BIT))
{
INFO_S("SMHC: error 0x%x status 0x%x\r\n", status & SMHC_RINT_INTERRUPT_ERROR_BIT,
status & ~SMHC_RINT_INTERRUPT_ERROR_BIT);
return FALSE;
}
if (pData && dma && (pData->blkcnt * pData->blksz) > 0)
done = ((status & flag) && (pSMHCx->IDST & SMHC_IDMAC_RECEIVE_INTERRUPT)) ? 1 : 0;
else
done = (status & flag);
SYS_DelayMS(1);
timeout_msecs--;
} while (!done);
/*if (pData && dma && (pData->blkcnt * pData->blksz) > 0) //数据传输完成,检查一下 SMHC_RINT_END_BIT_ERROR 是否有错
{
if (pSMHCx->RINTSTS & SMHC_RINT_END_BIT_ERROR)
{
INFO_S("SMHC: error 0x%x 停止位错误\r\n", status & SMHC_RINT_INTERRUPT_ERROR_BIT);
return FALSE;
}
}*/
return TRUE;
}
#define SMHC_RINT_END_BIT_ERROR (0x1U << 15)就是这个错误,只要读取数据就会产生,什么结束位错误标志,只能进行屏蔽或者忽略;
问题2:写数据的时候,会遇到数据CRC校验错误
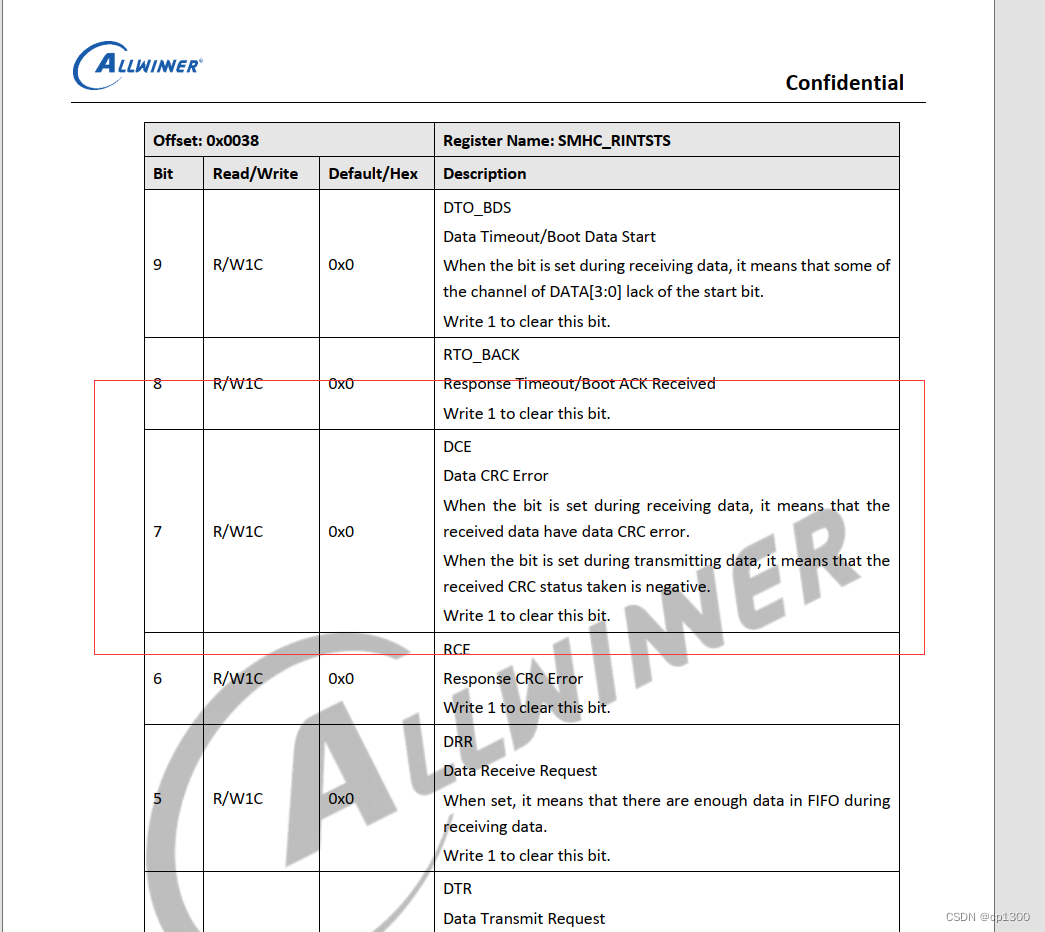
意思就是写入数据的时候,卡反馈数据crc校验错误,实际测试数据能正常写入,且无校验错误,测试代码如下:
INFO_S("MMC 开始读取数据:\r\n");
if (FALSE == SDMMC_ReadBlocks(&g_MMC_Handle, 0, Buff, 2)) //读取数据接口
{
ERROR_S("读取扇区失败\r\n");
}
else
{
INFO_S("MMC 读取数据成功1:\r\n");
for (i = 0; i < 512; i++)
{
INFO_C("%02X ", ((u8*)Buff)[i]);
}
INFO_C("\r\n");
INFO_S("MMC 读取数据成功2:\r\n");
for (i = 0; i < 512; i++)
{
INFO_C("%02X ", ((u8*)Buff)[i + 512]);
}
INFO_C("\r\n");
Buff[0] = 1;
Buff[1] = 2;
Buff[2] = 3;
Buff[3] = 4;
Buff[4] = 5;
Buff[5] = 6;
crc16 = user_crc16_modbus((u8*)Buff, 512); //对写入的数据进行crc校验
INFO_S("MMC写入数据校验结果:0x%X\r\n", crc16);
if (SDMMC_WriteBlocks(&g_MMC_Handle, 0, Buff, 1) == FALSE) //写数据接口
{
ERROR_S("写扇区失败\r\n");
}
else
{
INFO_S("MMC 写扇区成功\r\n");
}
}
while (1)
{
Delay_MS(3000);
memset(Buff, 0, sizeof(Buff));
INFO_S("MMC 开始读取数据:\r\n");
if (FALSE == SDMMC_ReadBlocks(&g_MMC_Handle, 0, Buff, 2)) //读取数据接口
{
ERROR_S("读取扇区失败\r\n");
}
else
{
crc16 = user_crc16_modbus((u8*)Buff, 512); //对写入的数据进行crc校验
INFO_S("MMC读取数据校验结果:0x%X\r\n", crc16);
INFO_S("MMC 读取数据成功1:\r\n");
for (i = 0; i < 512; i++)
{
INFO_C("%02X ", ((u8*)Buff)[i]);
}
INFO_C("\r\n");
INFO_S("MMC 读取数据成功2:\r\n");
for (i = 0; i < 512; i++)
{
INFO_C("%02X ", ((u8*)Buff)[i + 512]);
}
INFO_C("\r\n");
}
Delay_MS(300000000);
}将扇区0扇区1一起读取处理,然后将扇区0修改了几个字的数据,对待写入的数据进行CRC16校验,然后再写入到扇区0
Buff[0] = 1;
Buff[1] = 2;
Buff[2] = 3;
Buff[3] = 4;
Buff[4] = 5;
Buff[5] = 6;
crc16 = user_crc16_modbus((u8*)Buff, 512); //对写入的数据进行crc校验
INFO_S("MMC写入数据校验结果:0x%X\r\n", crc16);
if (SDMMC_WriteBlocks(&g_MMC_Handle, 0, Buff, 1) == FALSE) //写数据接口
{
ERROR_S("写扇区失败\r\n");
}
else
{
INFO_S("MMC 写扇区成功\r\n");
}之后再次读取数据,读取前将buff清零,确保数据是从emmc读取的,之后进行crc16校验,将读取的数据与写入之前的数据进行校验对比,确保数据一致;
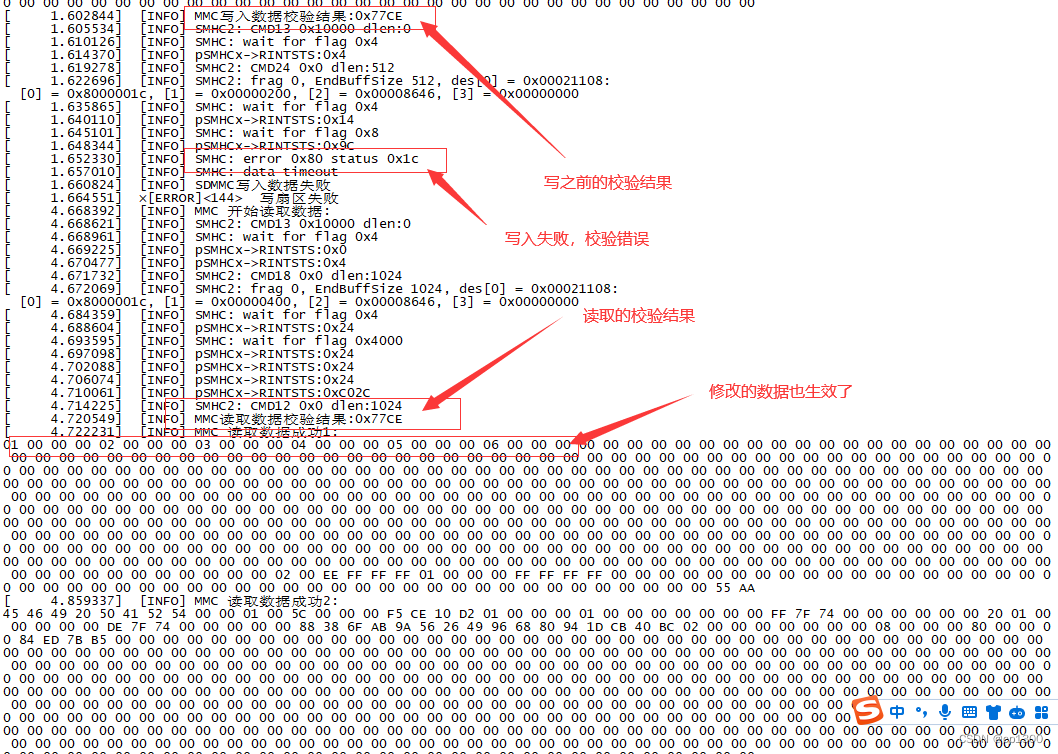
crc16 = user_crc16_modbus((u8*)Buff, 512); //对写入的数据进行crc校验
INFO_S("MMC读取数据校验结果:0x%X\r\n", crc16);调试信息如下:
等待后续找到问题后更新。。。