1、cvpr2024
CVPR2024官网:
Overleaf模板:
更改作者(去掉CVPR标识)
% \usepackage{cvpr} % To produce the CAMERA-READY version
\usepackage[review]{cvpr} % To produce the REVIEW version
改成
\usepackage{cvpr} % To produce the CAMERA-READY version
% \usepackage[review]{cvpr} % To produce the REVIEW version
插入图片
横屏单图
\begin{figure*}
\centering
\includegraphics[width=\linewidth]{fig/fig2.pdf}
% \begin{subfigure}{\linewidth}
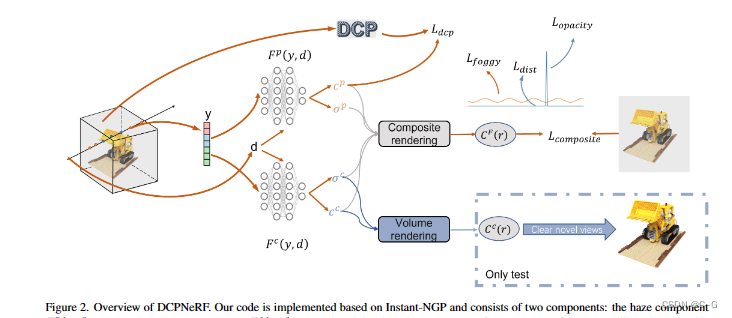
\caption{Overview of DCPNeRF. }
\label{fig:2}
% \end{subfigure}
\end{figure*}
多子图
\begin{figure}[!t]
\centering
\subfloat[Haz inputs]{
\label{fig:fig1.a}
\includegraphics[scale=0.38]{fig/fig1_a.png}}
\subfloat[Haz outputs]{
\label{fig:fig1.b}
\includegraphics[scale=0.38]{fig/fig1_b.png}}
\subfloat[Clear outputs]{
\label{fig:fig1.c}
\includegraphics[scale=0.38]{fig/fig1_c.png}}
\subfloat[Clear Depth]{
\label{fig:fig1.d}
\includegraphics[scale=0.38]{fig/fig1_d.png}}
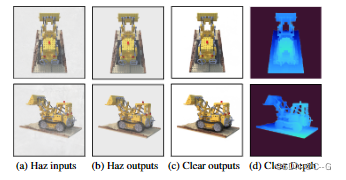
\caption{ {\bf Results of DCPNeRF.} Given a set of hazy images (a), DCPNeRF utilizes two neural radiance field components to jointly reconstruct the hazy scene (b). By combining DCP atmospheric light estimation and soft density-guided weights, a dehazed representation of the clear scene (c) is obtained from the hazy scene. Additionally, this method accurately estimates the depth map (d) of the clear scene.}
\label{fig:1}
\end{figure}
插入表格
普通表格
\begin{table}
\centering
\begin{tabular}{ccc}
\toprule
Method & PSNR($\uparrow$) & SSIM($\uparrow$) \\
\midrule
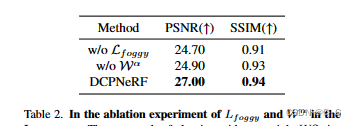
w/o $\mathcal{L}_{foggy}$ & 24.70 & 0.91 \\
w/o $\mathcal{W}^{\alpha}$ & 24.90 & 0.93 \\
DCPNeRF & \textbf{27.00} & \textbf{0.94}\\
\bottomrule
\end{tabular}
\caption{{\bf In the ablation experiment of $L_{foggy}$ and $W^{\alpha}$ in the Lego scene.} }
\label{tab:2}
\end{table}
三线表
\begin{table}
\resizebox{\linewidth}{!}{
\begin{tabular}{c|cccccc}
\hline
& \multicolumn{2}{c}{Lego} & \multicolumn{2}{c}{Hotdog} & \multicolumn{2}{c}{Chair} \\
Method & PSNR($\uparrow$) & \multicolumn{1}{c|}{SSIM($\uparrow$)} & PSNR($\uparrow$) & \multicolumn{1}{c|}{SSIM($\uparrow$)} & PSNR($\uparrow$) & SSIM($\uparrow$) \\ \hline
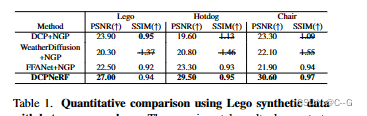
DCP+NGP & 23.90 & \multicolumn{1}{c|}{\textbf{0.95}} & 19.60 & \multicolumn{1}{c|}{ \st{1.13} } & 23.30 & \st{1.09} \\
\begin{tabular}[c]{@{}c@{}}WeatherDiffusion\\ +NGP\end{tabular} & 20.30 & \multicolumn{1}{c|}{\st{ 1.37}} & 20.80 & \multicolumn{1}{c|}{\st{ 1.46}} & 22.10 & \st{1.55} \\
FFANet+NGP & 22.50 & \multicolumn{1}{c|}{0.92} & 23.30 & \multicolumn{1}{c|}{0.93} & 21.90 & 0.94 \\ \hline
\textbf{DCPNeRF} & \textbf{27.00} & \multicolumn{1}{c|}{0.94} & \textbf{29.50} & \multicolumn{1}{c|}{\textbf{0.95}} & \textbf{30.60} & \textbf{0.97} \\ \hline
\end{tabular}
}
\caption{ {\bf Quantitative comparison using Lego synthetic data with heterogeneous haze.}}
\label{tab:1}
\end{table}
列表
无序列表
\begin{itemize}
\item one
\item two
\item three
\end{itemize}
有序列表
\begin{enumerate}[(1)]
\item 有编号的列表
\item ...
\end{enumerate}
注意:[(1)]可以变成[{[1]}], [(i)], …
正文注意点
插入url
\url{https://www.baidu.com}
首段不缩进
\noindent
正文段落首句子体加粗加黑
{\bf Image Dehazing.}
所有标题都要注意大写
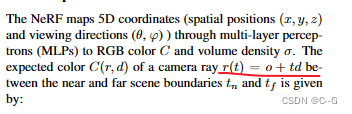
公式中的字母在正文出现要和公式一样,也就是用斜体
$r(t) = o + td$
公式中出现的英文用要正体
{\rm with}
公式解释where不缩进,公式结尾加逗号

引用公式、图片、表格等要统一
\Cref{fig:fig6.c}
or
\cref{fig:fig6.c}
参考文献
- 不要过于详细谷歌学术,当遇到arxiv时要仔细查找文献出处。
- 检查论文标题要与原文一致,注意大小写
- title加双括号,避免大小写编译错误
@inproceedings{ancuti2012enhancing,
author={Ancuti, Cosmin and Ancuti, Codruta Orniana and Haber, Tom and Bekaert, Philippe},
booktitle={2012 IEEE Conference on Computer Vision and Pattern Recognition},
title={{Enhancing underwater images and videos by fusion}},
year={2012},
pages={81-88}
}