(2)(2.1) Lightware SF40/C(360度)
文章目录
前言
1 安装SF40c
2 连接自动驾驶仪
3 通过地面站进行配置
4 参数说明
前言
Lightware SF40/C 360 度激光雷达(Lightware SF40/C 360degree lidar)可在 Copter-3.4 及更高版本的 Loiter 模式下用于物体回避。
!Warning
该功能尚未在各种情况下进行过测试,应谨慎使用。
1 安装SF40c

SF40c 应安装在飞行器顶部或底部,以便旋转部分水平扫描,其视线不受飞行器任何部分(包括 GPS 杆、飞行器支腿等)的阻碍。金色和黑色的圆形灯具徽标应朝向前方。
2 连接自动驾驶仪
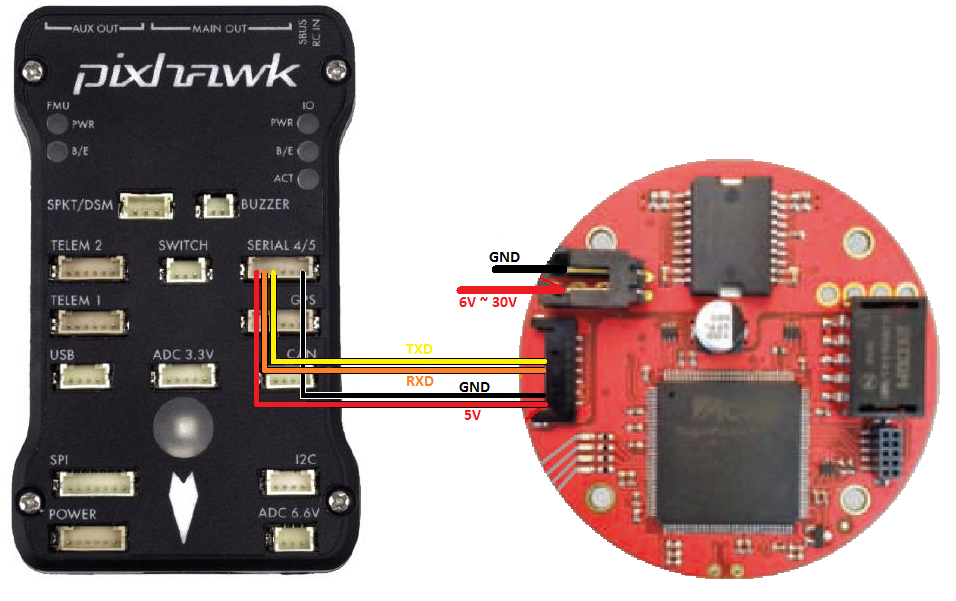
上图显示了如何将 SF40c 连接到自动驾驶仪的串行输入端。上图显示的是 Serial4 端口,但任何可用的串行端口都可以使用。
3 通过地面站进行配置
下面是第一个接近传感器的设置示例:
- SERIAL4_PROTOCOL = "11"("Lidar360"),如果使用 Serial4;
- SERIAL4_BAUD = "921",如果使用 Serial4;
- PRX1_TYPE = "7" (LightwareSF40c) 或"1" (LightwareSF40C-legacy) (如果使用的是旧版本的传感器;
- PRX1_ORIENT = "0",如果安装在飞行器顶部;PRX1_ORIENT = "1",如果倒置安装在飞行器底部;
- PRX1_YAW_CORR 允许调整 SF40c 的前进方向。确定该角度的一种方法是使用Mission Planner 的设置 >> 高级、近距离查看器,然后绕飞行器走一圈,确保扇区距离适当缩短;
- PRX1_IGN_ANG1 和 PRX1_IGN_WID1 参数允许定义飞行器周围应忽略的区域。例如,要避开飞行器后方 20 度的区域,可将 PRX1_IGN_ANG1 设置为 180,将 PRX1_IGN_WID1 设置为 20。
有关在 Copter 上使用该传感器避开物体的更多详情,请点击此处(here)。
4 参数说明
1、SERIAL4_PROTOCOL:串行4协议选择
注意:更改后需要重新启动。
控制 Serial4 端口应使用何种协议。请注意,Frsky 选项需要外部转换器硬件。详情请查看维基百科。
| Values | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|