【古月居《ros入门21讲》学习笔记】15_ROS中的坐标系管理系统
目录
说明:
1. 机器人中的坐标变换
tf功能包能干什么?
tf坐标变换如何实现
2. 小海龟跟随实验
安装 ros-melodic-turtle-tf
实验命令
运行效果
说明:
1. 本系列学习笔记基于B站:古月居《ROS入门21讲》课程,且使用的Ubuntu与ROS系统版本与课程完全一致;
| 虚拟机版本 | Linux系统版本 | ROS系统版本 |
|---|---|---|
| VMware WorkStation Pro 16 | Ubuntu18.04 | Melodic |
2. 课程中的所有示例代码均已跑通,且对Pyhon版本的代码也都做了运行验证,并附带验证过程(错误均已修正);
3. 本节是整个笔记的第15节,对应视频课程的第17节,请自行对应学习;
4. 整个系列笔记基本已经完结,但部分章节仍需润色修改 ,后面会陆续发布,请大家持续关注, 创作不易,感谢支持!
1. 机器人中的坐标变换
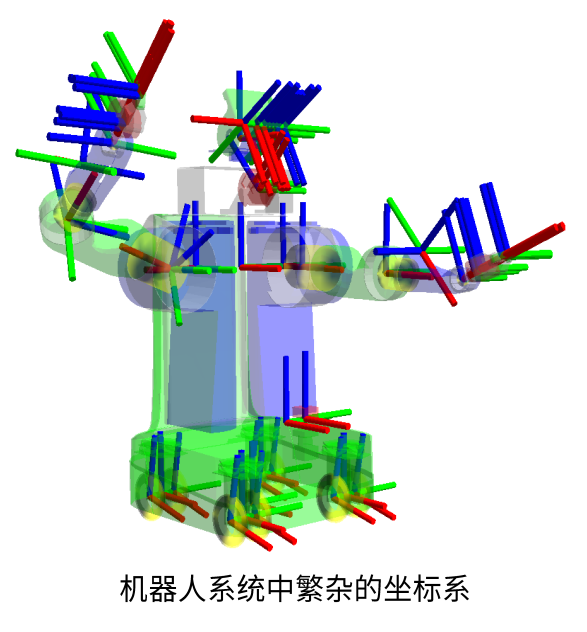
tf功能包能干什么?
-
五秒之前,机器人头部坐标系相对于全局坐标系的关系是什么样的?
-
机器人夹取的物体相对于机器人中心坐标系的位置在哪里?
-
机器人中心坐标系相对于全局坐标系的位置在哪里?
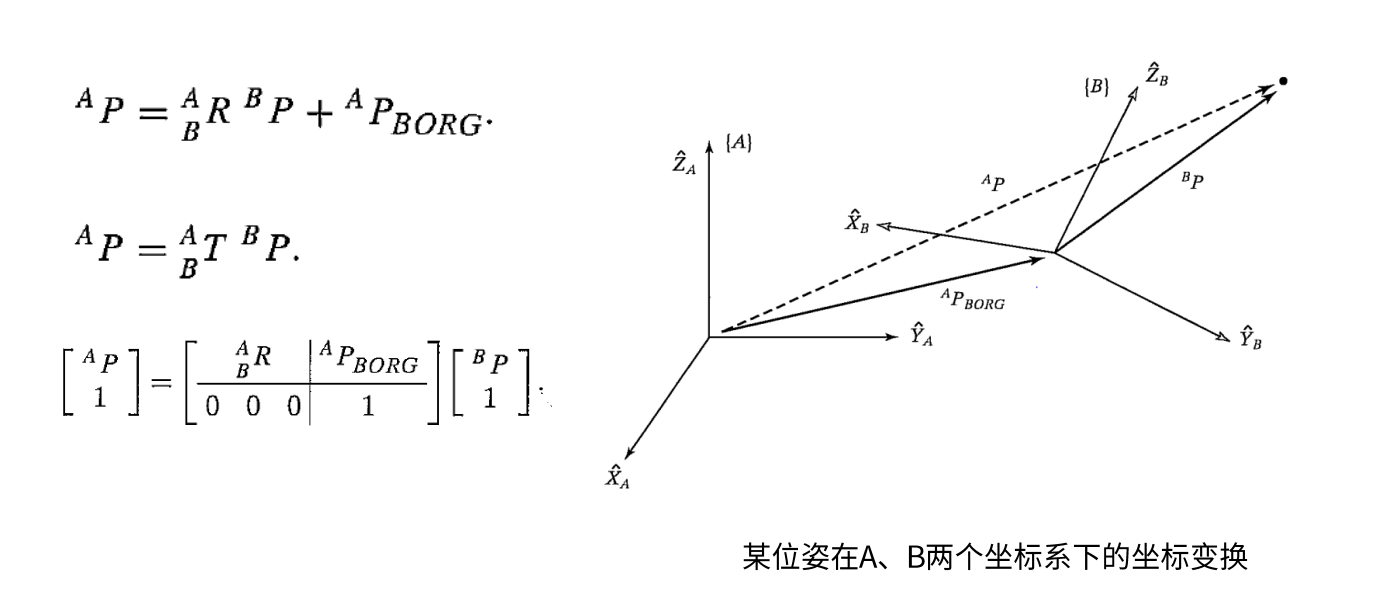
tf坐标变换如何实现
-
广播TF变换
-
监听TF变换

2. 小海龟跟随实验
安装 ros-melodic-turtle-tf
sudo apt-get install ros-melodic-turtle-tf
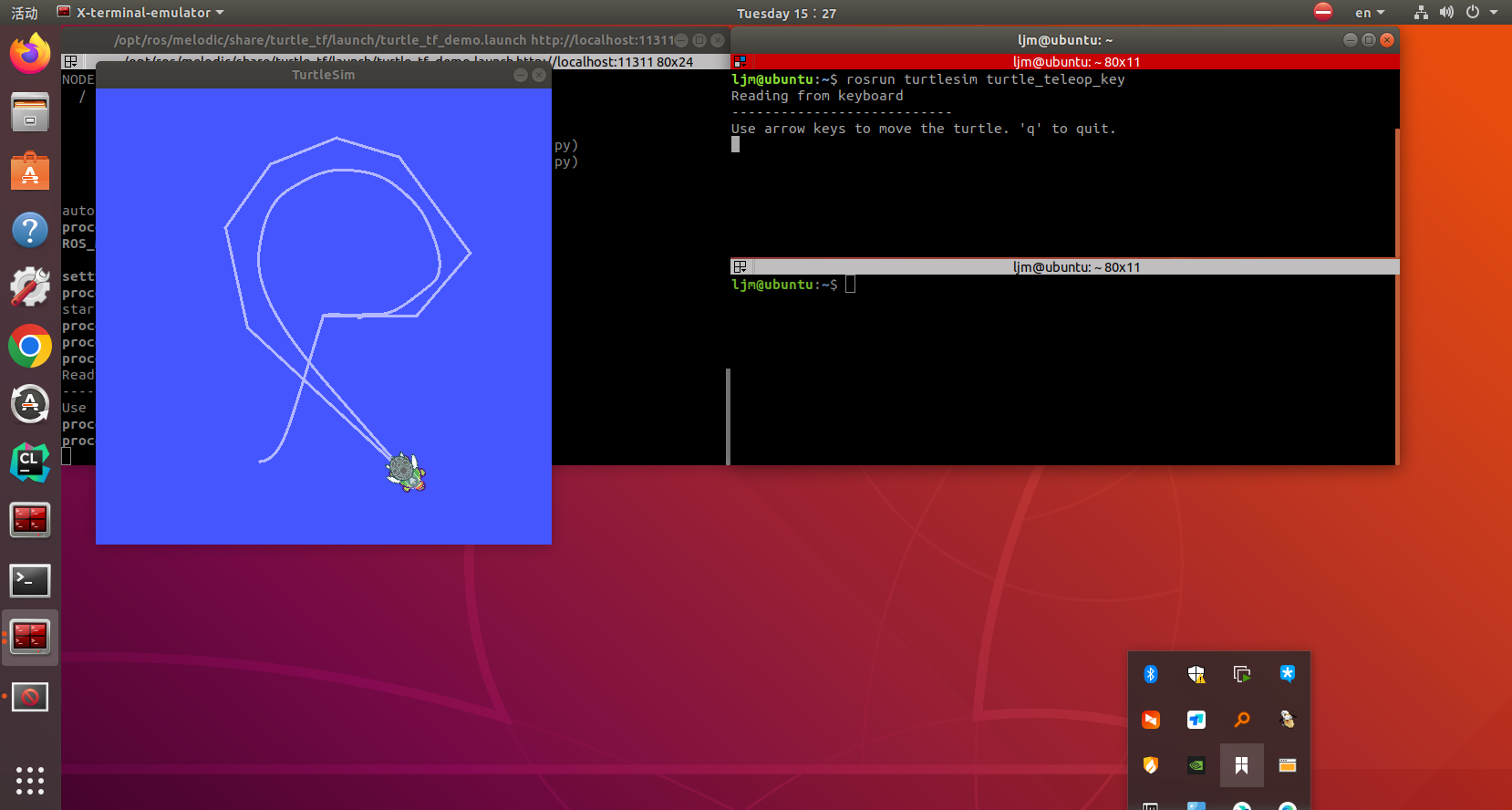
实验命令
roslaunch turtle_tf turtle_tf_demo.launch rosrun turtlesim turtle_teleop_key
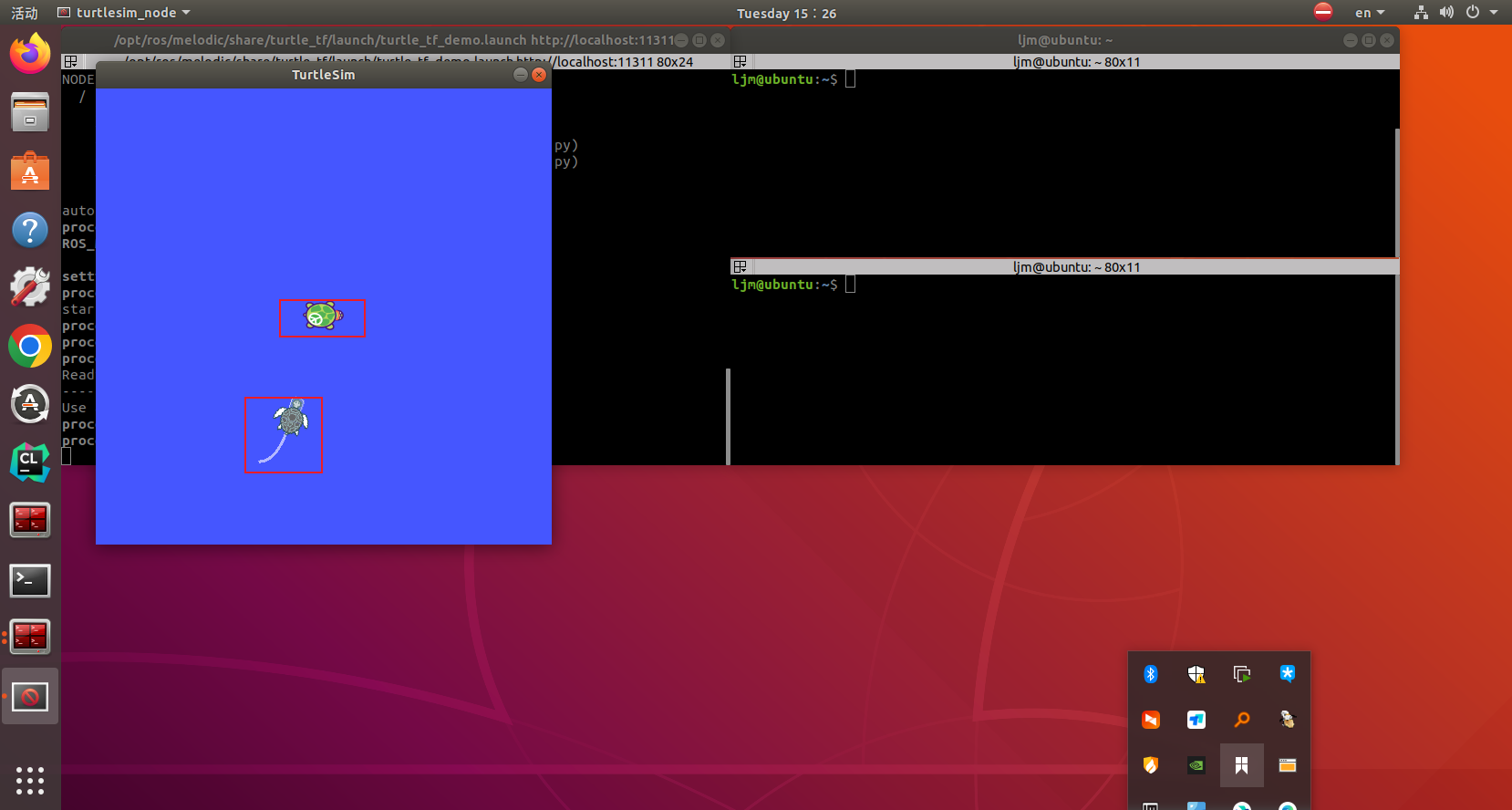
运行效果
运行后会有两只海龟,一只海龟在中心点,另一只海龟在下方,通过键盘控制中心点那只海龟,但下方的那只海龟也会自动的跟随前面的那只海龟同步去运动。
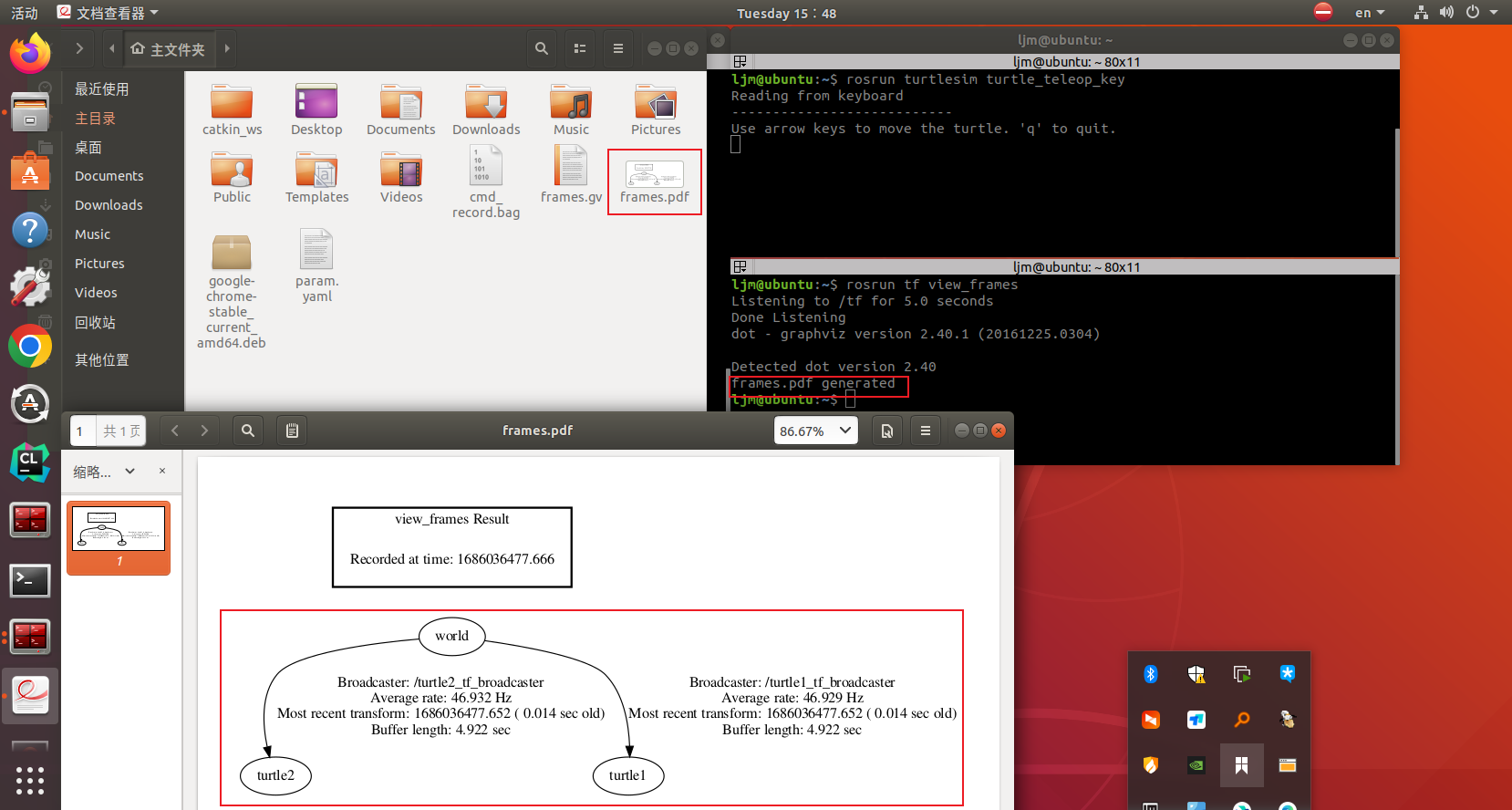
tf可视化工具
rosrun tf view_frames